Ros使用Arduino 2 使用rosserial创建一个publisher
1 启动arduino
将arduino开发板连接到电脑的usb口,在arduino IDE中进行设置。
选择Tools->Board,选择你所使用的arduino开发板的类型,所使用的arduino开发板是arduino pro min。
设置好开发板之后,继续选择Tools->Serial Port->/dev/ttyUSB1。
2 打开ROS例程
设置完成以后,在arduino IDE中,选择File->Examples->ros_lib->HelloWorld,就打开了如下的代码:
/*
* rosserial Publisher Example
* Prints "hello world!"
*/
//包含ros.h和其它可能会用到的消息的头文件。
#include <ros.h>
#include <std_msgs/String.h>
//创建了一个节点的句柄,它允许我们用来创建发布者和订阅者。这个节点的句柄同样与串口通信有关。
ros::NodeHandle nh;
//我们需要创建一个将要使用的发布者和订阅者。在上面的两行代码中,我们在话题chatter上创建了一个发布者。第二个参数是被发布者将来用于发布消息的一个消息的引用。
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg); char hello[13] = "hello world!";
//始化节点句柄,告知那些话题将会有发布,以及订阅你想收听的话题。
void setup()
{
nh.initNode();
nh.advertise(chatter);
}
//最后在loop函数中,节点在chatter话题上发布了消息“hello world”,并且调用了ros::spinOnce(),也就是说所有ROS通信的回调都被处理。
void loop()
{
str_msg.data = hello;
chatter.publish( &str_msg );
nh.spinOnce();
delay(1000);
}
在arduino IDE中,点击upload运行程序。
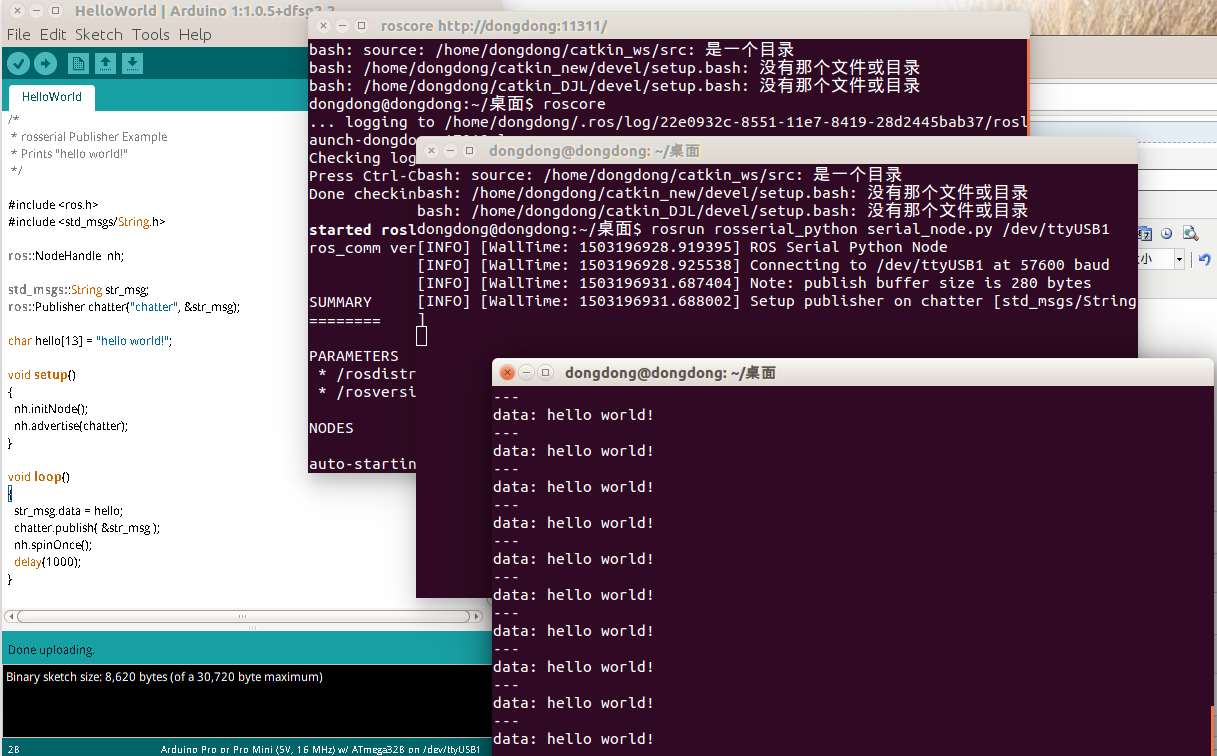
运行ROS节点
打开一个窗口
roscore
新打开一个窗口
rosrun rosserial_python serial_node.py /dev/ttyUSB1
在一个终端中输入如下命令来查看你的arduino发送的消息:
rostopic echo chatter
你可看到arduino的数据通信灯在闪,这可以说明arduino确实在发送数据给电脑。
Ros使用Arduino 2 使用rosserial创建一个publisher的更多相关文章
- Ros使用Arduino 3用rosserial创建一个subscriber
在前面的一节中,我们已经使用arduino创建了一个publisher节点,接下来将会用arduino来创建一个subscriber,接收电脑传去的信息并做出相应的反应. 1启动Arduino 将ar ...
- ROS学习记录(三)————创建一个简单的发布节点和订阅节点
暑假在家有些懈怠,不,非常懈怠- -||!良心已经发痛了,想快些补回原来的进度,但忽然发现,中断了一段时间再重新去学习,有的地方连最基本的符号都忘记了 ,这次特意弄个最最基础的,恢复一下,以前的进度. ...
- 创建一个ROS包
先前笔者不知道catkin到底是个什么东东,后来终于在官方网站上找到了答案,原来catkin是ROS的一个官方的编译构建系统,是原本的ROS的编译构建系统rosbuild的后继者.catkin的来源有 ...
- 创建一个ROS工作空间(ROS Workspace)
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment1.mkdir -p ~/catkin_ws/ ...
- ROS笔记1 安装及创建一个ROS Package
安装 跟着官方的安装指引来就行了.安装前要先确定自己的ros版本和ubuntu版本.这二者是一一对应的. http://wiki.ros.org/ROS/Installation 主要是package ...
- ROS的初步学习--创建一个工作空间和一个程序包
快速开始 创建工作区(workspace) 工作区可以作为一个独立的项目进行编译,存放ROS程序的源文件.编译文件和执行文件.建立工作区的方法如下: mkdir -p ~/catkin_ws/src ...
- Ros使用Arduino 1安装Arduino IDE
安装Arsuino IDE sudo apt-get install arduino 设置库文件路径 在使用ROS的库文件时,必须在代码的开头包括: #include <ros.h> 接下 ...
- ROS学习笔记(六)——创建、编译包
$ cd ~/catkin_ws #如果新开一个终端,就需要先吧ROS的工作空间配置好 $ source devel/setup.bash #工作空间的环境配置 #正式开始创建包 $ catkin_c ...
- ROS Learning-015 learning_tf(编程) 编写一个监听器程序 (Python版)
ROS Indigo learning_tf-02 编写一个 监听器 程序 (Python版) 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 1 ...
随机推荐
- 7种html5css3网页图片展示特效代码
鼠标拖拽图片渐变透明切换特效 mobile手机左右滑动切换幻灯片 游戏透明提示图层幻灯片特效 可以编辑滚动条灯片颜色的scroll插件 几种文字动画显示插件代码 360度背景图片旋转的css3动画 左 ...
- Python十讲
第一讲:从零开始学Python 第二讲:变量和基础数据类型 第三讲:条件分支以及循环 第四讲:列表与元组 第五讲:字典 第六讲:函数 第七讲:类 第八讲:标准库 第九讲:异常 第十讲:文件处理
- JavaSE 软件工程师 认证考试试卷3
JavaSE 软件工程师 认证考试试卷 笔试 考试时间150分钟 总分 100分 姓 名_______________________ 身份证号___________________ ...
- react组件中的constructor和super小知识
react组件中的constructor和super小知识 1.react中用class申明的类一些小知识 如上图:类Child是通过class关键字申明,并且继承于类React. A.Child的类 ...
- React中props
今天让我们开启新的篇章好吧,来搞一搞React,以下所有操作都是我个人的一些理解,如果有错吴还请指出,想要看更全的可以去React官网可能一下子好吧 昨天按摩没到位,导致今天身体不太行,撸码千万别苦了 ...
- vue引入bootstrap——webpack
想要在vue中引入bootstrap,引入的时候需要按照如下的步骤进行. 1.引入jquery 2.引入bootstrap 阅读本文前,应该能够搭建环境,使用vue-cli进行项目的创建,可以参考 ...
- Power BI 与 Azure Analysis Services 的数据关联:4、Power BI 连接到Azure Analysis Services 并展示
Power BI 与 Azure Analysis Services 的数据关联:4.Power BI 连接到Azure Analysis Services 过使用服务器名称别名,用户可以使用较短 ...
- js,H5本地存储
//存储本地存储----setItem(存储名称,数据名称) var c={name:"man",sex:"woman"}; localStorage.setI ...
- axure工具的使用总结
---恢复内容开始--- Axure工具的使用 axure是什么? Axure RP是一款快速原型设计工具,它不需要任何编程或写代码基础,就可以设计出交互效果良好的产品原型,常用于互联网产品设计.网页 ...
- 12.2、多线程通信:queue
queue: 什么是队列:是一种特殊的结构,类似于列表.不过就像排队一样,队列中的元素一旦取出,那么就会从队列中删除. 线程之间的通信可以使用队列queue来进行 线程如何使用queue.Queue[ ...