[转]前景检测算法--ViBe算法
原文:http://blog.csdn.net/zouxy09/article/details/9622285
转自:http://blog.csdn.net/app_12062011/article/details/51866319
因为监控发展的需求,目前前景检测的研究还是很多的,也出现了很多新的方法和思路。个人了解的大概概括为以下一些:
帧差、背景减除(GMM、CodeBook、 SOBS、 SACON、 VIBE、 W4、多帧平均……)、光流(稀疏光流、稠密光流)、运动竞争(Motion Competition)、运动模版(运动历史图像)、时间熵……等等。如果加上他们的改进版,那就是很大的一个家族了。
对于上一些方法的一点简单的对比分析可以参考下:
http://www.cnblogs.com/ronny/archive/2012/04/12/2444053.html
至于哪个最好,看使用环境吧,各有千秋,有一些适用的情况更多,有一些在某些情况下表现更好。这些都需要针对自己的使用情况作测试确定的。呵呵。
推荐一个牛逼的库:http://code.google.com/p/bgslibrary/里面包含了各种背景减除的方法,可以让自己少做很多力气活。
还有王先荣博客上存在不少的分析:
http://www.cnblogs.com/xrwang/archive/2010/02/21/ForegroundDetection.html
下面的博客上转载王先荣的上面几篇,然后加上自己分析了两篇:
本文主要关注其中的一种背景减除方法:ViBe。stellar0的博客上对ViBe进行了分析,我这里就不再啰嗦了,具体的理论可以参考:
http://www2.ulg.ac.be/telecom/research/vibe/
http://blog.csdn.net/stellar0/article/details/8777283
http://blog.csdn.net/yongshengsilingsa/article/details/6659859
http://www2.ulg.ac.be/telecom/research/vibe/download.html
http://www.cvchina.info/2011/12/25/vibe/
ViBe是一种像素级的背景建模、前景检测算法,该算法主要不同之处是背景模型的更新策略,随机选择需要替换的像素的样本,随机选择邻域像素进行更新。在无法确定像素变化的模型时,随机的更新策略,在一定程度上可以模拟像素变化的不确定性。
背景模型的初始化
初始化是建立背景模型的过程,一般的检测算法需要一定长度的视频序列学习完成,影响了检测的实时性,而且当视频画面突然变化时,重新学习背景模型需要较长时间。
ViBe算法主要是利用单帧视频序列初始化背景模型,对于一个像素点,结合相邻像素点拥有相近像素值的空间分布特性,随机的选择它的邻域点的像素值作为它的模型样本值。
优点:不仅减少了背景模型建立的过程,还可以处理背景突然变化的情况,当检测到背景突然变化明显时,只需要舍弃原始的模型,重新利用变化后的首帧图像建立背景模型。
缺点:由于可能采用了运动物体的像素初始化样本集,容易引入拖影(Ghost)区域。
前景检测过程
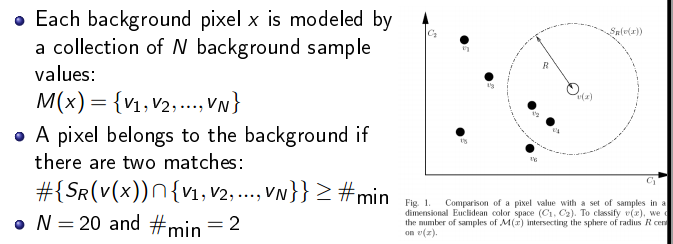
背景模型为每个背景点存储一个样本集,然后每个新的像素值和样本集比较判断是否属于背景。
计算新像素值和样本集中每个样本值的距离,若距离小于阈值,则近似样本点数目增加。
如果近似样本点数目大于阈值,则认为新的像素点为背景。
检测过程主要由三个参数决定:样本集数目N,阈值#min和距离相近判定的阈值R,一般具体实现,参数设置为N=20,#min=2,R=20。
背景模型的更新策略
1).无记忆更新策略
每次确定需要更新像素点的背景模型时,以新的像素值随机取代该像素点样本集的一个样本值。
2).时间取样更新策略
并不是每处理一帧数据,都需要更新处理,而是按一定的更新率更新背景模型。当一个像素点被判定为背景时,它有1/rate的概率更新背景模型。rate是时间采样因子,一般取值为16。
3).空间邻域更新策略
针对需要更新像素点,随机的选择一个该像素点邻域的背景模型,以新的像素点更新被选中的背景模型。
ViBe的改进
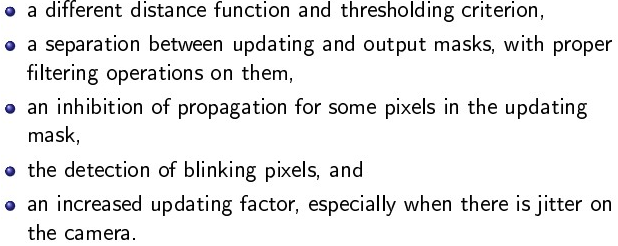
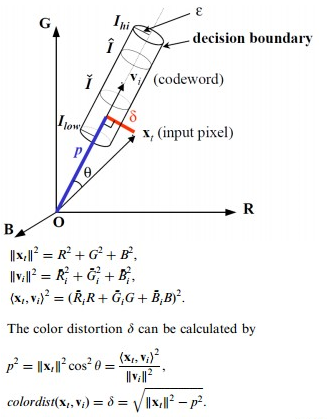
1).距离计算方法
以圆椎模型代替原来的几何距离计算方法
以自适应阈值代替原来固定的距离判定阈值,阈值大小与样本集的方差成正比,样本集方差越大,说明背景越复杂,判定阈值应该越大。

2).分离updating mask和segmentation mask
引入目标整体的概念,弥补基于像素级前景检测的不足。针对updating mask和segmentation mask采用不同尺寸的形态学处理方法,提高检测准确率。
3).抑制邻域更新
在updating mask里,计算像素点的梯度,根据梯度大小,确定是否需要更新邻域。梯度值越大,说明像素值变化越大,说明该像素值可能为前景,不应该更新。
4).检测闪烁像素点
引入闪烁程度的概念,当一个像素点的updating label与前一帧的updating label不一样时,blinking level增加15,否则,减少1,然后根据blinking level的大小判断该像素点是否为闪烁点。闪烁像素主要出现在背景复杂的场景,如树叶、水纹等,这些场景会出现像素背景和前景的频繁变化,因而针对这些闪烁应该单独处理,可以作为全部作为背景。
5).增加更新因子
ViBe算法中,默认的更新因子是16,当背景变化很快时,背景模型无法快速的更新,将会导致前景检测的较多的错误。因而,需要根据背景变化快慢程度,调整更新因子的大小,可将更新因子分多个等级,如rate = 16,rate = 5,rate = 1。
1)VIBE-A powerful random technique to estimatie the background in video sequences.
2) VIBE-A universal background subtraction algorithms for video sequences
VIBE的头文件Vibe.hpp如下:
#pragma once
#include "stdafx.h"
#define WINSIZE 3 class Vibe
{
public:
Vibe(void);
Vibe(IplImage *img);
void SetMinMatch(int nthreshold){g_MinMatch=nthreshold;}
void SetRadius(int radius){g_Radius=radius;}
void SetSampleNum(int num){g_SampleNum=num;}
void SetThreshold(double t){g_threshold=t;}
IplImage* GetForeground(){return g_ForeImg;}
IplImage* GetSegMask(){return g_SegementMask;}
void Detect(IplImage *img);
void ForegroundCombineEdge(); // 结合边缘信息
void DeleteSmallAreaInForeground(double minArea=);//删除小面积区域
// 实现背景更新机制
void Update();
// 实现后处理,主要用形态学算子
void PostProcess(); public:
~Vibe(void); private:
void ClearLongLifeForeground(int i_lifeLength=); // 清除场景中存在时间较长的像素,i_lifeLength用于控制允许存在的最长时间
double AreaDense(IplImage *pFr,int AI,int AJ,int W,int H); //计算(i,j)处邻域大小为W×H的密度
int GetRandom(int istart,int iend); // 默认istart=0,iend=15
int GetRandom(int random);
int GetRandom();// 产生一个随机数
// 计算两个像素之间的欧式距离
double CalcPixelDist(CvScalar bkCs,CvScalar curCs);
// 按照Kim的方法来计算颜色畸变
double CalcuColorDist(CvScalar bkCs,CvScalar curCs);
int g_SampleNum;// Sample number for the models,默认为20
int g_MinMatch; // 当前像素与背景模型匹配的最少个数,默认为2
int g_Height;
int g_Width;
int g_Radius;// 球体的半径,默认为20
int g_offset; //边界的宽和高
double g_threshold; // 距离度量的阈值
unsigned char ***g_Model;// 保存背景模型
IplImage *g_ForeImg;// 保存前景图
IplImage *g_Edge; IplConvKernel* element; IplImage *g_SegementMask; //分割掩膜
IplImage *g_UpdateMask; // 更新掩膜
IplImage *g_Gray;
int ** LifeLength; // 记录前景点的生命长度,如果前景点的生命长度到达一定的阈值,则将其融入背景中去,且要随机两次。
};
对应的实现文件如下Vibe.cpp所示:
#include "StdAfx.h"
#include "Vibe.h" Vibe::Vibe(void)
{
g_Radius=;
g_MinMatch=;
g_SampleNum=;
g_offset=(WINSIZE-)/; } Vibe::Vibe(IplImage *img)
{
if (!img)
{
cout<<" The parameter referenced to NUll Pointer!"<<endl;
return;
}
this->g_Height=img->height;
this->g_Width=img->width; g_Radius=;
g_MinMatch=;
g_SampleNum=;
g_threshold=;
g_offset=(WINSIZE-)/; g_ForeImg=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,);
g_Gray=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,);
g_Edge=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,);
g_SegementMask=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,);
g_UpdateMask=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,); element=cvCreateStructuringElementEx(,,,,CV_SHAPE_CROSS,NULL); cvCvtColor(img,g_Gray,CV_BGR2GRAY); // 以上完成相关的初始化操作
/********************** 以下实现第一帧在每个像素的8邻域内的采样功能,建立对应的背景模型*****************************/ int i=,j=,k=;
g_Model=new unsigned char**[g_SampleNum];
for (k=;k<g_SampleNum;k++)
{
g_Model[k]=new unsigned char *[g_Height];
for(i=;i<g_Height;i++)
{
g_Model[k][i]=new unsigned char [g_Width];
for (j=;j<g_Width;j++)
{
g_Model[k][i][j]=;
}
}
} // 采样进行背景建模
double dVal;
int ri=,rj=; //随机采样的值
for (i=g_offset;i<g_Height-g_offset;i++)
{
for (j=g_offset;j<g_Width-g_offset;j++)
{
// 周围3*3的邻域内进行采样
for(k=;k<g_SampleNum;k++)
{
ri=GetRandom(i);
rj=GetRandom(j);
dVal=cvGetReal2D(g_Gray,ri,rj);
g_Model[k][i][j]=dVal;
}
}
} // 初始化前景点掩膜的生命长度
LifeLength=new int *[g_Height];
for (i=;i<g_Height;i++)
{
LifeLength[i]=new int [g_Width];
for(j=;j<g_Width;j++)
{
LifeLength[i][j]=;
}
}
} void Vibe::Detect(IplImage *img)
{
cvZero(g_ForeImg);
cvCvtColor(img,g_Gray,CV_BGR2GRAY);
int i=,j=,k=;
double dModVal,dCurrVal;
int tmpCount=;// 距离比较在阈值内的次数
double tmpDist=;
int iR1,iR2;//产生随机数
int Ri,Rj; // 产生邻域内X和Y的随机数 for (i=;i<g_Height;i++)
{
for (j=;j<g_Width;j++)
{
if( i < g_offset || j < g_offset || i> g_Height - g_offset || j> g_Width - g_offset )
{
cvSetReal2D(g_ForeImg,i,j,);
continue;
}
else
{
tmpCount=;
dCurrVal=cvGetReal2D(g_Gray,i,j);
for (k=;k<g_SampleNum && tmpCount<g_MinMatch ;k++)
{
dModVal=g_Model[k][i][j];
//tmpDist=CalcPixelDist(dCurrVal,dModVal);
//tmpDist=CalcuColorDist(dCurrVal,dModVal);
tmpDist=fabs(dModVal-dCurrVal);
if (tmpDist<g_Radius)
{
tmpCount++;
}
} //判断是否匹配上
if (tmpCount>=g_MinMatch)
{
cvSetReal2D(g_ForeImg,i,j,);
// 背景模型的更新
iR1=GetRandom(,);
if (iR1==)
{
iR2=GetRandom();
g_Model[iR2][i][j]=dCurrVal;
} //进一步更新邻域模型 iR1=GetRandom(,);
if (iR1==)
{
Ri=GetRandom(i);
Rj=GetRandom(j);
iR2=GetRandom();
g_Model[iR2][Ri][Rj]=dCurrVal;
}
}
else
{
cvSetReal2D(g_ForeImg,i,j,);
}
}
}
} //ForegroundCombineEdge();
DeleteSmallAreaInForeground();
ClearLongLifeForeground();
//PostProcess();
} double Vibe::AreaDense(IplImage *pFr,int AI,int AJ,int W,int H)
{
if (AI<= || AJ<= || AJ>=(g_Width-) || AI>=(g_Height-))
{
return ;
}
int Num=,i=,j=;
double dVal=,dense=;
int Total=(*H+)*(*W+);
for (i=AI-H;i<=AI+H;i++)
{
for (j=AJ-W;j<=AJ+W;j++)
{
dVal=cvGetReal2D(pFr,i,j);
if (dVal>)
{
Num++;
}
}
}
dense=(double)Num/(double)Total;
return dense;
} void Vibe::ForegroundCombineEdge()
{
cvZero(g_Edge);
//cvZero(g_SegementMask);
//cvCopy(g_ForeImg,g_SegementMask);
cvCanny(g_Gray,g_Edge,,,);
int i=,j=;
double dense;
double dVal;
for (i=g_offset;i<g_Height-g_offset;i++)
{
for (j=g_offset;j<g_Width-g_offset;j++)
{
dense=AreaDense(g_ForeImg,i,j,,);
dVal=cvGetReal2D(g_Edge,i,j);
if (dense>0.2 && dVal>)
{
cvSetReal2D(g_ForeImg,i,j,);
}
}
} } void Vibe::DeleteSmallAreaInForeground(double minArea/* =20 */)
{
//cvZero(g_SegementMask);
//cvCopy(g_ForeImg,g_SegementMask);
int region_count = ;
CvSeq *first_seq = NULL, *prev_seq = NULL, *seq = NULL;
CvMemStorage* storage = cvCreateMemStorage();
cvClearMemStorage(storage);
cvFindContours( g_ForeImg, storage, &first_seq, sizeof(CvContour), CV_RETR_LIST );
for( seq = first_seq; seq; seq = seq->h_next )
{
CvContour* cnt = (CvContour*)seq;
if( cnt->rect.width * cnt->rect.height < minArea )
{
prev_seq = seq->h_prev;
if( prev_seq )
{
prev_seq->h_next = seq->h_next;
if( seq->h_next ) seq->h_next->h_prev = prev_seq;
}
else
{
first_seq = seq->h_next;
if( seq->h_next ) seq->h_next->h_prev = NULL;
}
}
else
{
region_count++;
}
}
cvZero(g_ForeImg);
cvDrawContours(g_ForeImg, first_seq, CV_RGB(, , ), CV_RGB(, , ), , -); /*
CvContourScanner scanner = cvStartFindContours( g_ForeImg, storage,sizeof(CvContour), CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, cvPoint(0,0) );
CvSeq *contours=NULL,*c=NULL;
int poly1Hull0=0;
int nContours=0;
double perimScale=100;
while( (c = cvFindNextContour( scanner )) != 0 )
{
double len = cvContourPerimeter( c );
double q = (g_ForeImg->height + g_ForeImg->width)/perimScale; // calculate perimeter len threshold
if( len < q ) //Get rid of blob if it's perimeter is too small
cvSubstituteContour( scanner, 0 );
else //Smooth it's edges if it's large enough
{
CvSeq* newC;
if( poly1Hull0 ) //Polygonal approximation of the segmentation
newC = cvApproxPoly( c, sizeof(CvContour), storage, CV_POLY_APPROX_DP, 2, 0 );
else //Convex Hull of the segmentation
newC = cvConvexHull2( c, storage, CV_CLOCKWISE, 1 );
cvSubstituteContour( scanner, newC );
nContours++;
}
}
contours = cvEndFindContours( &scanner );
// paint the found regions back into the image
cvZero( g_ForeImg );
for( c=contours; c != 0; c = c->h_next )
cvDrawContours( g_ForeImg, c, cvScalarAll(255), cvScalarAll(0), -1, CV_FILLED, 8,cvPoint(0,0));
*/ cvReleaseMemStorage(&storage);
} void Vibe::ClearLongLifeForeground(int i_lifeLength/* =200 */)
{
int i=,j=;
double dVal=;
double dLife=;
int iR1,iR2=;
double dCurrVal=;
for (i=g_offset;i<g_Height-g_offset;i++)
{
for (j=g_offset;j<g_Width-g_offset;j++)
{
dVal=cvGetReal2D(g_ForeImg,i,j);
dLife=LifeLength[i][j];
if (dLife>i_lifeLength)
{
LifeLength[i][j]=;
dCurrVal=cvGetReal2D(g_Gray,i,j);
// 更新背景模型
iR1=GetRandom();
iR2=GetRandom();
g_Model[iR1][i][j]=dCurrVal;
g_Model[iR2][i][j]=dCurrVal;
}
else
{
LifeLength[i][j]=dLife+;
} }
}
} void Vibe::Update()
{
cvZero(g_UpdateMask); } void Vibe::PostProcess()
{
cvZero(g_SegementMask);
cvMorphologyEx(g_ForeImg,g_SegementMask,NULL,element,CV_MOP_OPEN,); } //算颜色畸变
double Vibe::CalcuColorDist(CvScalar bkCs,CvScalar curCs)
{
double r,g,b,br,bg,bb;
r=curCs.val[];
g=curCs.val[];
b=curCs.val[]; br=bkCs.val[];
bg=bkCs.val[];
bb=bkCs.val[]; double curDist=r*r+g*g*b*b;
double bkDist=br*br+bg*bg+bb*bb; double curBK=r*br+g*bg+b*bb;
double curbkDist=curBK*curBK;
double SquareP;
if (bkDist==0.0)
{
SquareP=;
}
else
{
SquareP=curbkDist/bkDist;
}
double dist=sqrtf(curDist-SquareP);
return dist;
} double Vibe::CalcPixelDist(CvScalar bkCs,CvScalar curCs)
{
double tmpDist=pow(bkCs.val[]-curCs.val[],)+pow(bkCs.val[]-curCs.val[],)+pow(bkCs.val[]-curCs.val[],);
return sqrtf(tmpDist);
} int Vibe::GetRandom()
{
int val = g_SampleNum * 1.0 * rand() / RAND_MAX;
if( val == g_SampleNum )
return val - ;
else
return val;
} int Vibe::GetRandom(int random)
{
int val=random-g_offset+rand()%(*g_offset);
if (val<random-g_offset)
{
val=random-g_offset;
}
if (val>random+g_offset)
{
val=random+g_offset;
}
return val;
} int Vibe::GetRandom(int istart,int iend)
{
int val=istart+rand()%(iend-istart);
return val;
} Vibe::~Vibe(void)
{
if (g_ForeImg)
{
cvReleaseImage(&g_ForeImg);
}
if (g_SegementMask)
{
cvReleaseImage(&g_SegementMask);
}
if (g_UpdateMask)
{
cvReleaseImage(&g_UpdateMask);
}
if (g_Gray)
{
cvReleaseImage(&g_Gray);
} if (g_Model!=NULL)
{
delete[]g_Model;
g_Model=NULL;
}
}
最后附上调用的main函数:
int _tmain(int argc, _TCHAR* argv[])
{
CvCapture *capture=NULL;
IplImage* frame=NULL;
IplImage* pForeImg=NULL;
IplImage* segImg=NULL; char *file_path="E:\\testVideo\\VTS_01_4.avi"; // m1 test2 锦带河 VTS_01_4_2 head rear VTS_01_6_2 VTS_01_4
//const char* file_path="E:\\suntektechvideo\\锦带河.avi"; //test2 capture=cvCreateFileCapture(file_path);
if (!capture)
{
//cout<<"Read Video File Error!"<<endl;
return -;
}
frame=cvQueryFrame(capture);
frame=cvQueryFrame(capture); cvNamedWindow("img",);
cvNamedWindow("foreN",);
//cvNamedWindow("seg",1); Vibe* pV=new Vibe(frame); while(frame=cvQueryFrame(capture))
{
pV->Detect(frame);
pForeImg=pV->GetForeground();
//segImg=pV->GetSegMask();
//frame->origin=1;
//pForeImg->origin=1;
cvShowImage("img",frame);
cvShowImage("foreN",pForeImg);
//cvShowImage("seg",segImg);
cvWaitKey();
} cvReleaseImage(&frame);
cvReleaseImage(&pForeImg);
cvReleaseCapture(&capture);
return ;
}
代码没做过多的注释,但现有的注释应该对于理解代码足够了。另外,对于计算机视觉里的任何一种算法都不是万能的,VIBE也不例外,只能说VIBE相对其他算法有一定的优势,但是还是有相当的不足,其pixel-wise-based的灰度建模方式解决不了pixel-wise建模算法共有的问题,其他必要辅助信息的融合是必要的。
[转]前景检测算法--ViBe算法的更多相关文章
- 运动目标前景检测之ViBe源代码分析
一方面为了学习,一方面按照老师和项目的要求接触到了前景提取的相关知识,具体的方法有很多,帧差.背景减除(GMM.CodeBook. SOBS. SACON. VIBE. W4.多帧平均……).光流(稀 ...
- 运动目标检测ViBe算法
一.运动目标检测简介 视频中的运动目标检测这一块现在的方法实在是太多了.运动目标检测的算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测.先简单从视频中的背景类型来讨论. ...
- paper 83:前景检测算法_1(codebook和平均背景法)
前景分割中一个非常重要的研究方向就是背景减图法,因为背景减图的方法简单,原理容易被想到,且在智能视频监控领域中,摄像机很多情况下是固定的,且背景也是基本不变或者是缓慢变换的,在这种场合背景减图法的应用 ...
- 运动检测(前景检测)之(一)ViBe
运动检测(前景检测)之(一)ViBe zouxy09@qq.com http://blog.csdn.net/zouxy09 因为监控发展的需求,目前前景检测的研究还是很多的,也出现了很多新的方法和思 ...
- VIBE(前景检测)
1.VIBE思想: 为每个像素点存储了一个样本集,样本集中采样值就是该像素点过去的像素值和其邻居点的像素值,然后将每一个新的像素值和样本集进行比较来判断是否属于背景点. 2.VIBE模型初始化 通用的 ...
- ViBe(Visual Background extractor)背景建模或前景检测
ViBe算法:ViBe - a powerful technique for background detection and subtraction in video sequences 算法官网: ...
- 【计算机视觉】背景建模--Vibe 算法优缺点分析
一.Vibe 算法的优点 Vibe背景建模为运动目标检测研究邻域开拓了新思路,是一种新颖.快速及有效的运动目标检测算法.其优点有以下两点: 1.思想简单,易于实现.Vibe通常随机选取邻域20个样本为 ...
- Atitit 图像清晰度 模糊度 检测 识别 评价算法 源码实现attilax总结
Atitit 图像清晰度 模糊度 检测 识别 评价算法 源码实现attilax总结 1.1. 原理,主要使用像素模糊后的差别会变小1 1.2. 具体流程1 1.3. 提升性能 可以使用采样法即可..1 ...
- Atitit 图像清晰度 模糊度 检测 识别 评价算法 原理
Atitit 图像清晰度 模糊度 检测 识别 评价算法 原理 1.1. 图像边缘一般都是通过对图像进行梯度运算来实现的1 1.2. Remark: 1 1.3. 1.失焦检测. 衡量画面模糊的主要方 ...
随机推荐
- You must SET PASSWORD before executing this statement解决
[转载] MySql5.6操作时报错:You must SET PASSWORD before executing this statement解决 转载: http://blog.csdn.net/ ...
- http server 下载地址
windows 64为位:https://www.apachelounge.com/download/
- 解决VS2013/VS2010简体中文版无法使用ReSharper快捷键的问题
对于简体中文版VS2013,若应用ReSharper快捷键失效,按下面方法修复: 1) 首先在ReSharper设置里,应用你的快捷键设置 2) 关闭VS2013,然后用记事本打开“%LOCALAPP ...
- Notepad 列编辑、正则查找、替换
目标: 将源数据转成初始化sql语句.源数据: 104110040018,1,中国银行,中国银行天津琼州道支行,NULL,1100,天津市,12,天津市 104110040059,1,中国银行,中国银 ...
- Python中的sorted函数以及operator.itemgetter函数
operator.itemgetter函数operator模块提供的itemgetter函数用于获取对象的哪些维的数据,参数为一些序号(即需要获取的数据在对象中的序号),下面看例子. a = [1,2 ...
- Shell 的source命令
source命令用法: source FileName 作用:在当前bash环境下读取并执行FileName中的命令. 注:该命令通常用命令“.”来替代. 如:source .bash_rc 与 . ...
- iOS NSString的常用用法
//1.创建常量字符串. NSString *astring = @"This is a String!"; //2.创建空字符串,给予赋值. NSString *astrin ...
- @错误抑制运算符和or die()
1.错误抑制运算符可在任何表达式前使用,PHP支持一个错误抑制运算符@.当将其放置在一个PHP表达式之前,则该表达式可能产生的任何错误信息都被忽略掉.@运算符只对表达式有效. 2.or die() 当 ...
- myeclipse10添加jQuery自动提示
首先先要在装上spket插件,这个网上有好多教程,我就不详细说了,主要说一下后面的设置,因为我发现我按照网上的装完也设置完没办法使用自动提示功能,以下是我根据前辈的经验然后自己摸索出来的: 选中所建的 ...
- Java之--Java语言基础组成—数组
Java语言基础组成-数组 Java语言由8个模块构成,分别为:关键字.标识符(包名.类名.接口名.常量名.变量名等).注释.常量和变量.运算符.语句.函数.数组. 本片主要介绍Java中的数组,数组 ...