PCL学习之:将超声数据按照PCL点云方式发布出去
前言:基于2D激光雷达的机器人,想让它跑自动导航,众所周知有2个比较明显的缺陷,1,那就是普通的激光雷达无法对玻璃或是镜面物体有反映; 2,机器人避障时只能对某一个平面的物体有反映,超过或者低于这个平面就不行,类似桌面等悬空的物体就无法检测。
基于这个缺陷,大部分的做法是使用廉价的超声雷达来辅助激光雷达,达到改善这个缺陷的目地。而且超声波模块很便宜,大部分在5~15元之间。测距误差在<3cm,用于机器人效果上还是不错的。之前的做法是,直接读取超声然后判断障碍物是否在安全距离,在安全距离以内就急停,这种做法有一个缺陷,那就是无法让机器人对障碍物进行绕行,所有把超声的数据安装PCL点云的方式发布出去,然后塞到局部动态地图里面,这样就可以达到使得机器人可以向激光雷达一样,做绕行的动作。废话少说,直接上代码:
class TestPcl():
def __init__(self):
rospy.init_node('talk_sonar_pcl', anonymous=True)
pub_cloud = rospy.Publisher("sonar_pcl", PointCloud2)
self.sonar_pub = rospy.Publisher('sonar', Range, queue_size=5)
rospy.Subscriber("stm_pub_ultrasonic1", Int16, self.sonarCallback)
self.sonar_value = 0
while not rospy.is_shutdown():
now = rospy.Time.now()
sonar_range = Range()
sonar_range.header.stamp = now
sonar_range.header.frame_id = "/sonar"
sonar_range.radiation_type = Range.ULTRASOUND
sonar_range.field_of_view = 0.3
sonar_range.min_range = 0.04
sonar_range.max_range = 0.8
sonar_range.range = self.sonar_value/1000.0
self.sonar_pub.publish(sonar_range)
pcloud = PointCloud2()
# make point cloud
cloud = [[1,5,1],[1.1,5,1],[1.2,5,1]]
cloud[0][1] = sonar_range.range
cloud[1][1] = sonar_range.range
cloud[2][1] = sonar_range.range
pcloud.header.frame_id="/base_footprint"
pcloud = pc2.create_cloud_xyz32(pcloud.header, cloud)
pub_cloud.publish(pcloud)
rospy.loginfo(pcloud)
rospy.sleep(1.0)
def sonarCallback(self,seq):
self.sonar_value = seq.data
代码很简单,我就不解释了。
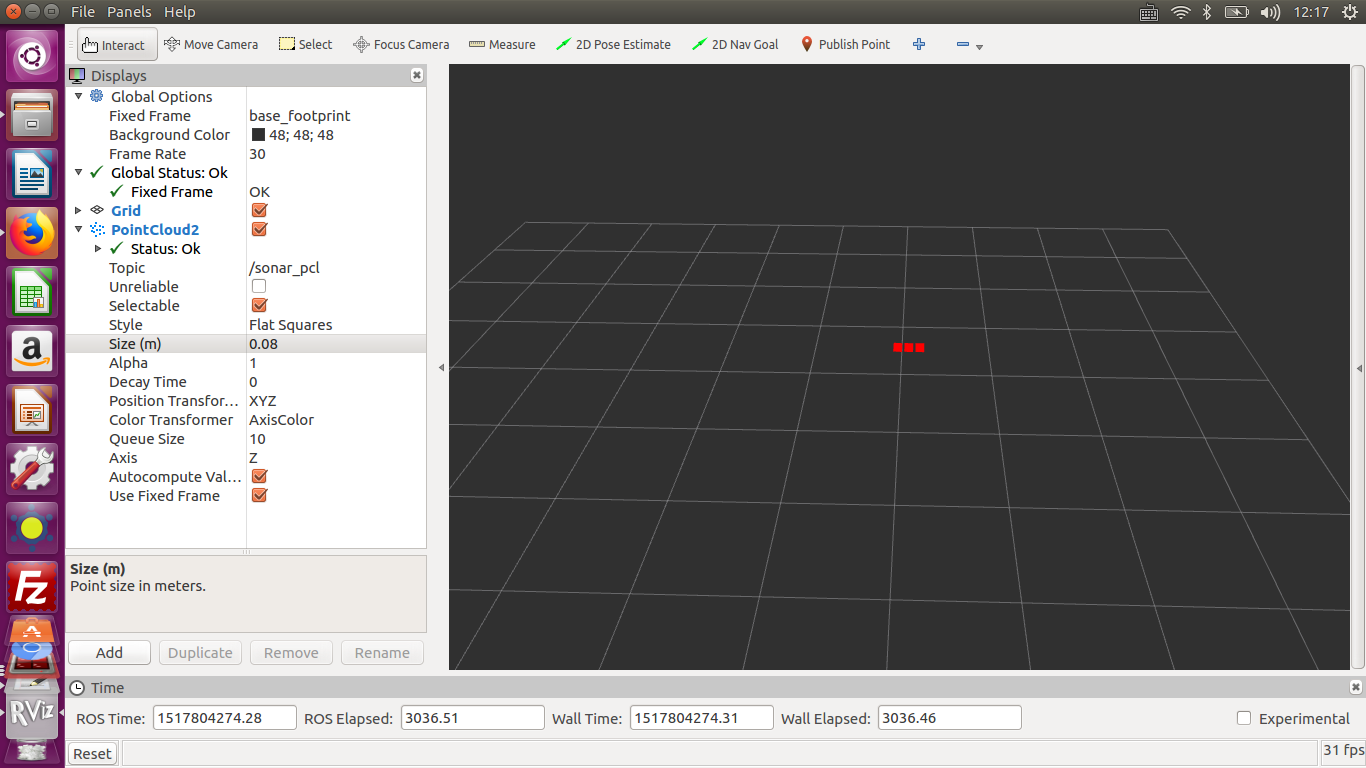
运行rviz,添加pointcloud2,topic主题为sonar_pcl就可以看到点云随着超声数据变化:
PCL学习之:将超声数据按照PCL点云方式发布出去的更多相关文章
- PCL学习八叉树
建立空间索引在点云数据处理中有着广泛的应用,常见的空间索引一般 是自顶而下逐级划分空间的各种空间索引结构,比较有代表性的包括BSP树,KD树,KDB树,R树,四叉树,八叉树等索引结构,而这些结构中,K ...
- PCL学习笔记1
先贴一段代码,从别处抄来的 #include <iostream> #include <pcl/io/pcd_io.h> #include <pcl/point_type ...
- PCL读取PCD文件的数据
1.pcd文件——rabbit.pcd 链接:https://pan.baidu.com/s/1v6mjPjwd7fIqUSjlIGTIGQ提取码:zspx 新建项目pcl rabbit.pcd 和p ...
- PCL学习(三) SAC-IA 估记object pose
SAC-IA是基于RANSAC算法的对齐算法 通过降采样提高法向计算.FPFH特征的计算 最后通过SAC-IA计算得到对齐的旋转和平移 #include <Eigen/Core> #inc ...
- PCL学习(二)三维模型转点云 obj转pcd----PCL实现
#include <pcl/io/io.h> #include <pcl/io/pcd_io.h> #include <pcl/io/obj_io.h> #incl ...
- ios网络学习------6 json格式数据的请求处理
ios网络学习------6 json格式数据的请求处理 分类: IOS2014-06-30 20:33 471人阅读 评论(3) 收藏 举报 #import "MainViewContro ...
- Java学习-028-JSON 之二 -- 数据读取
JSON数据由 JSONObject.JSONArray.key_value 组合而成.通常来说,JSONObject 可以包含 JSONObject.JSONArray.key_value:JSON ...
- Node.js学习之TCP/IP数据通讯
Node.js学习之TCP/IP数据通讯 1.使用net模块实现基于TCP的数据通讯 提供了一个net模块,专用于实现TCP服务器与TCP客户端之间的通信 1.1创建TCP服务器 在Node.js利用 ...
- PCL—关键点检测(Harris)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5064848.html 除去NARF这种和特征检测联系比较紧密的方法外,一般来说特征检测都会对曲率变化比较剧烈的点更 ...
随机推荐
- PELT算法
参考:http://www.wowotech.net/process_management/PELT.html 本文是对https://lwn.net/Articles/531853/的翻译 mark ...
- 从零开始学 ASP.NET Core 与 EntityFramework Core 目录
从零开始学 ASP.NET Core 与 EntityFramework Core 介绍 我是一个目录,它旨在帮助开发者循序渐进的了解 ASP.NET Core 和 Entity Framework ...
- 用Java实现二叉查找树
二叉查找树的实现 1. 原理 二叉查找树,又称为二叉排序树.二叉搜索树.对于树中每一个节点X,它的左子树中所有项的值小于X中的项,而它的右子树中所有项的值大于X中的项.二叉查找树的平均深度为O(log ...
- 为了能早点买房,我用 Python 预测房价走势!
前言 本文的文字及图片来源于网络,仅供学习.交流使用,不具有任何商业用途,版权归原作者所有,如有问题请及时联系我们以作处理. 作者: Python高校 PS:如有需要Python学习资料的小伙伴可以加 ...
- Python爬取猫眼电影《飞驰人生》47858万条评论并对其进行数据分析
前言 文的文字及图片来源于网络,仅供学习.交流使用,不具有任何商业用途,版权归原作者所有,如有问题请及时联系我们以作处理. 作者: Yura不说数据说 ,PYuraL PS:如有需要Python学习资 ...
- 从实例一步一步入门学习SpringCloud的Eureka、Ribbon、Feign、熔断器、Zuul的简单使用(附代码下载)
场景 SpringCloud -创建统一的依赖管理: https://blog.csdn.net/BADAO_LIUMANG_QIZHI/article/details/102530574 Sprin ...
- django3-路由系统进阶
1.django的url到底是什么 就是路径 ,看成django的目录 ,每个目录对应个视图函数 ,当然一个url仅能对应一个函数 2.url的格式 url(正则表达式,views函数名,参数,别名) ...
- 字体图标引入到HTML---复制用代码
第一步:在样式里面声明字体: 告诉别人我们自己定义的字体 ps: font-family的名字可以自己起 src是引入了4种字体,不用修改的 @font-face { font-family: 'ic ...
- 【Web】解决简书图片不显示问题“系统维护中,图片暂时无法加载”
简书不显示图片的解决方法 首次编辑于2019-6-6 最近几天在浏览简书上的文章时,发现图片显示不出来,提示"系统维护中,图片暂时无法加载". 猜测应该是简书由于某种原因暂时屏蔽了 ...
- laravel Error 笔记
一.有关CSRF验证 1.网址访问POST请求,如 127.0.0.1:81/delUser?id=1 网页请求是默认是GET请求方式,看返回的数据信息就知道,数据是以GET方式发送的,所以若路由中 ...