poj 1265&&poj 2954(Pick定理)
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 5811 | Accepted: 2589 |
Description
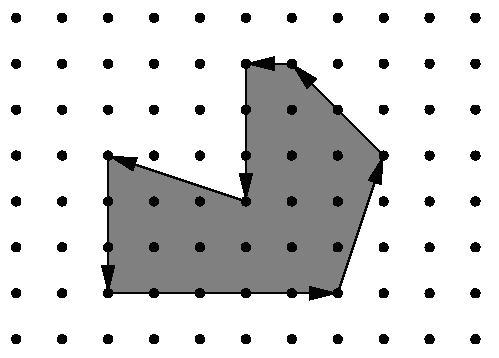
Figure 1: Example area.
You are hired to write a program that calculates the area occupied
by the new facility from the movements of a robot along its walls. You
can assume that this area is a polygon with corners on a rectangular
grid. However, your boss insists that you use a formula he is so proud
to have found somewhere. The formula relates the number I of grid points
inside the polygon, the number E of grid points on the edges, and the
total area A of the polygon. Unfortunately, you have lost the sheet on
which he had written down that simple formula for you, so your first
task is to find the formula yourself.
Input
For each scenario, you are given the number m, 3 <= m < 100,
of movements of the robot in the first line. The following m lines
contain pairs 揹x dy�of integers, separated by a single blank, satisfying
.-100 <= dx, dy <= 100 and (dx, dy) != (0, 0). Such a pair means
that the robot moves on to a grid point dx units to the right and dy
units upwards on the grid (with respect to the current position). You
can assume that the curve along which the robot moves is closed and that
it does not intersect or even touch itself except for the start and end
points. The robot moves anti-clockwise around the building, so the area
to be calculated lies to the left of the curve. It is known in advance
that the whole polygon would fit into a square on the grid with a side
length of 100 units.
Output
output for every scenario begins with a line containing 揝cenario #i:�
where i is the number of the scenario starting at 1. Then print a single
line containing I, E, and A, the area A rounded to one digit after the
decimal point. Separate the three numbers by two single blanks.
Terminate the output for the scenario with a blank line.
Sample Input
2
4
1 0
0 1
-1 0
0 -1
7
5 0
1 3
-2 2
-1 0
0 -3
-3 1
0 -3
Sample Output
Scenario #1:
0 4 1.0 Scenario #2:
12 16 19.0 题意:一个多边形从某个点出发(假设从0,0出发),每次有一个增量(dx,dy)!=(0,0) 经过n次之后又回到了原点
组成了一个简单多边形.问此时多边形内部的整点的数量,多边形边上的整点的数量,多边形的面积. Pick定理:一个计算点阵中顶点在格点上的多边形面积公式:S=a+b/2-1,其中a表示多边形内部的整点数,b表示
多边形边界上的整点数,s表示多边形的面积。(ps:整点是x,y坐标都是整数)
每条边上的格点数(顶点只算终点) = gcd(abs(x2-x1),abs(y2-y1))
///题意:一个多边形从某个点出发(假设从0,0出发),每次有一个增量(dx,dy)!=(0,0) 经过n次之后又回到了原点
///组成了一个简单多边形.问此时多边形内部的整点的数量,多边形边上的整点的数量,多边形的面积.
///Pick定理:一个计算点阵中顶点在格点上的多边形面积公式:S=a+b/2-1,其中a表示多边形内部的整点数,b表示
///多边形边界上的整点数,s表示多边形的面积。(ps:整点是x,y坐标都是整数)
///每条边上的格点数 = gcd(abs(x2-x1),abs(y2-y1))
#include <iostream>
#include <cstdio>
#include <cstring>
#include <math.h>
#include <algorithm>
#include <stdlib.h>
using namespace std;
const int N =;
struct Point {
int x,y;
}p[N];
int gcd(int a,int b){
return b==?a:gcd(b,a%b);
}
int cross(Point a,Point b,Point c){
return (a.x-c.x)*(b.y-c.y)-(a.y-c.y)*(b.x-c.x);
}
int main()
{
int tcase;
scanf("%d",&tcase);
int k = ;
while(tcase--){
int n;
scanf("%d",&n);
p[].x = ,p[].y = ;
int On=,In=;
double area=;
for(int i=;i<=n;i++){
int dx,dy;
scanf("%d%d",&dx,&dy);
p[i].x= p[i-].x+dx;
p[i].y=p[i-].y+dy;
On+=gcd(abs(dx),abs(dy));
}
for(int i=;i<n-;i++){
area+=cross(p[i],p[i+],p[])/2.0;
}
In = (int)(area+-On/);
printf("Scenario #%d:\n%d %d %.1lf\n\n",k++,In,On,area);
}
return ;
}
poj 2954
http://acm.pku.edu.cn/JudgeOnline/problem?id=2954
///题意:完全包含在三角形内的整点有多少
#include <iostream>
#include <cstdio>
#include <cstring>
#include <math.h>
#include <algorithm>
#include <stdlib.h>
using namespace std;
struct Point {
int x,y;
}p1,p2,p3;
int gcd(int a,int b){
return b==?a:gcd(b,a%b);
}
int cross(Point a,Point b,Point c){
return (a.x-c.x)*(b.y-c.y)-(a.y-c.y)*(b.x-c.x);
}
int main()
{
while(scanf("%d%d%d%d%d%d",&p1.x,&p1.y,&p2.x,&p2.y,&p3.x,&p3.y)!=EOF){
if(p1.x==&&p1.y==&&p2.x==&&p2.y==&&p3.x==&&p3.y==) break;
double area = fabs(cross(p2,p3,p1)/2.0); int On = gcd(abs(p2.x-p1.x),abs(p2.y-p1.y))+gcd(abs(p3.x-p2.x),abs(p3.y-p2.y))+gcd(abs(p3.x-p1.x),abs(p3.y-p1.y));
printf("%d\n",(int)(area+-On/));
}
return ;
}
poj 1265&&poj 2954(Pick定理)的更多相关文章
- poj 1265 Area(Pick定理)
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5666 Accepted: 2533 Description ...
- POJ 1265 Area (pick定理)
题目大意:已知机器人行走步数及每一步的坐标变化量,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:叉积求面积,pick定理求点. pick定理:面积=内部点数+边上点数/2-1 ...
- POJ 1265 Area POJ 2954 Triangle Pick定理
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5227 Accepted: 2342 Description ...
- 【POJ】2954 Triangle(pick定理)
http://poj.org/problem?id=2954 表示我交了20+次... 为什么呢?因为多组数据我是这样判断的:da=sum{a[i].x+a[i].y},然后!da就表示没有数据了QA ...
- poj 2954 Triangle(Pick定理)
链接:http://poj.org/problem?id=2954 Triangle Time Limit: 1000MS Memory Limit: 65536K Total Submissio ...
- poj 1265 Area (Pick定理+求面积)
链接:http://poj.org/problem?id=1265 Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: ...
- POJ 1265 Area (Pick定理 & 多边形面积)
题目链接:POJ 1265 Problem Description Being well known for its highly innovative products, Merck would d ...
- poj 1265 Area(pick定理)
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 4373 Accepted: 1983 Description Bein ...
- [poj 1265]Area[Pick定理][三角剖分]
题意: 给出机器人移动的向量, 计算包围区域的内部整点, 边上整点, 面积. 思路: 面积是用三角剖分, 边上整点与GCD有关, 内部整点套用Pick定理. S = I + E / 2 - 1 I 为 ...
随机推荐
- 2037: [Sdoi2008]Sue的小球
2037: [Sdoi2008]Sue的小球 链接 题解 论文 代码 #include<cstdio> #include<algorithm> #include<cstr ...
- 手把手教你如何逐步安装OpenStack
[TechTarget中国原创] 尽管OpenStack官方提供的在线安装教程和分步向导能够为管理员提供很大帮助,但是依然存在很多不尽如人意的地方.因此在Ubuntu上安装OpenStack的过程当中 ...
- android gesture检测
1.关于on<TouchEvent>的返回值 a return value of true from the individual on<TouchEvent> methods ...
- [转]Android进程间通信--消息机制及IPC机制实现
Android为了屏蔽进程的概念,利用不同的组件[Activity.Service]来表示进程之间的通信! 组件间通信的核心机制是Intent,通过Intent可以开启一个Activity或Servi ...
- WebApi实现Ajax模拟Multipart/form-data方式多文件上传
前端页面代码: <input type="file" class="file_control" /><br /> <input t ...
- css改变光标
<span style="cursor:auto"> Auto</span><br /> <span style="cursor ...
- Dapper 学习笔记
一.基础 1.Dapper代码就一个SqlMapper.cs文件, 前人测试Dapper速度较快 的Orm,读取速度接近IDataReader,超过DataTable. 2.a.下载地址 https: ...
- 基于Xtrabackup备份集来恢复某个误删除的表(drop)
Preface Yesterday,I've demonstratated how to rescue a droped and a truncated table based on ...
- Python 实现随机打乱字符串
from random import shuffle def shuffle_str(s): # 将字符串转换成列表 str_list = list(s) # 调用random模块的shuffle函数 ...
- node.js和npm的安装
1.进入node.js官方网站,下载和系统对应的版本,我下载的是这个最新版本:node-v8.2.1-x64.msi https://nodejs.org/en/download/ 2.windows ...