ROS-URDF-活动关节
前言:介绍活动关节,并使机器人活动起来。
参考自:http://wiki.ros.org/urdf/Tutorials/Building%20a%20Movable%20Robot%20Model%20with%20URDF
一、修改urdf文件
<?xml version="1.0"?>
<robot name="visual">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
</joint>
<link name="right_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="right_base_joint" type="fixed">
<parent link="right_leg"/>
<child link="right_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="right_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
</visual>
</link>
<joint name="right_front_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="right_base"/>
<child link="right_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="right_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="right_back_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="right_base"/>
<child link="right_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
</joint>
<link name="left_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="left_base_joint" type="fixed">
<parent link="left_leg"/>
<child link="left_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="left_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="left_base"/>
<child link="left_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="left_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_back_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="left_base"/>
<child link="left_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<joint name="gripper_extension" type="prismatic">
<parent link="base_link"/>
<child link="gripper_pole"/>
<limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>
<link name="gripper_pole">
<visual>
<geometry>
<cylinder length="0.2" radius="0.01"/>
</geometry>
<origin rpy="0 1.57075 0 " xyz="0.1 0 0"/>
</visual>
</link>
<joint name="left_gripper_joint" type="revolute">
<axis xyz="0 0 1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
</joint>
<link name="left_gripper">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="left_tip_joint" type="fixed">
<parent link="left_gripper"/>
<child link="left_tip"/>
</joint>
<link name="left_tip">
<visual>
<origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<joint name="right_gripper_joint" type="revolute">
<axis xyz="0 0 -1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.2 -0.01 0"/>
<parent link="gripper_pole"/>
<child link="right_gripper"/>
</joint>
<link name="right_gripper">
<visual>
<origin rpy="-3.1415 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="right_tip_joint" type="fixed">
<parent link="right_gripper"/>
<child link="right_tip"/>
</joint>
<link name="right_tip">
<visual>
<origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<link name="head">
<visual>
<geometry>
<sphere radius="0.2"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="head_swivel" type="continuous">
<parent link="base_link"/>
<child link="head"/>
<axis xyz="0 0 1"/>
<origin xyz="0 0 0.3"/>
</joint>
<link name="box">
<visual>
<geometry>
<box size="0.08 0.08 0.08"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<joint name="tobox" type="fixed">
<parent link="head"/>
<child link="box"/>
<origin xyz="0.1814 0 0.1414"/>
</joint>
</robot>
----------------------------------------------------------
代码解析:
<joint name="head_swivel" type="continuous">关节为连续型
<parent link="base_link"/>
<child link="head"/>
<axis xyz="0 0 1"/>限制只绕z轴旋转
<origin xyz="0 0 0.3"/>
</joint>
<joint name="left_gripper_joint" type="revolute">关节为旋转型
<axis xyz="0 0 1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>限定最大力度1000N,绕z周旋转弧度为0弧度-0.548弧度,最大速度为0.5m/s
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
</joint>
<joint name="gripper_extension" type="prismatic">关节类型为棱柱型,只能沿着轴移动,不能沿着轴转动。
<parent link="base_link"/>
<child link="gripper_pole"/>
<limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>
二、运行launch文件
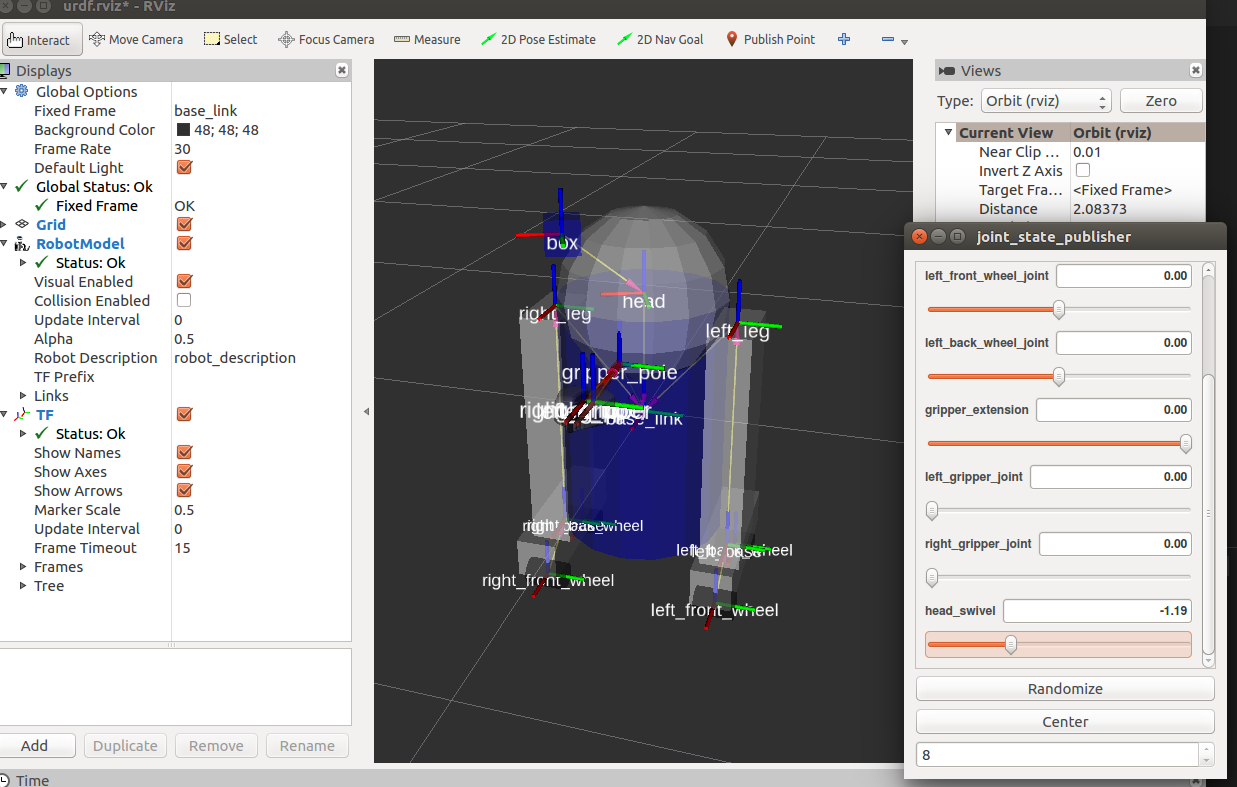
当您在GUI中移动滑块时,模型将在Rviz中移动。这是怎么做到的?首先,GUI解析URDF并找到所有非固定关节及其限制。然后,它使用滑块的值来发布sensor_msgs / JointState消息。然后robot_state_publisher使用它们来计算不同部分之间的所有变换。然后,生成的变换树用于显示Rviz中的所有形状。
-END-
ROS-URDF-活动关节的更多相关文章
- ROS(URDF机器人建模)
新建功能包mbot_description 在功能包下新建文件config,launch,meshes,urdf. 在launch文件夹下新建文件display_mbot_base_urdf.laun ...
- ROS urdf和xacro文件详解
视觉标签:visual <visual> <origin xyz="0.0 0.0 0.0" /> <geometry> <box siz ...
- 2017~ROS暑期学校~分享
http://www.robotics.sei.ecnu.edu.cn/ROS2017/ ---- 往年暑期学校活动:2015年,2016年 报名开始时间7月2日晚10点:暑期学校报名,机器人挑战赛报 ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- 【探索之路】机器人篇(3)-给mwRobot建立模型
在创建一个mwRobot_description程序包那一节中,我们添加了依赖roscpp rospy std_msgs 和 urdf , 现在我们再添加一个xacro依赖. 如何添加依赖? 打开程 ...
- 多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismati ...
- 软件篇-02-基于ZED 2和ORB_SLAM2的SLAM实践
时隔两周,我又回来了. 本期内容如题,ZED 2的SDK功能还是挺多的,包括轨迹跟踪,实时建图等等.虽然由于是商业产品,我看不到他们的源代码,但是根据使用情况来看,ZED 2内部是采用了IMU和光 ...
- <ROS> 机器人描述--URDF和XACRO
文章转自 https://blog.csdn.net/sunbibei/article/details/52297524 特此鸣谢原创作者的辛勤付出 1 URDF 文件 1.1 link和joint ...
- ROS(机器人URDF模型优化)
URDF模型 xacro优化后的URDF模型 1.精简模型代码(创建宏定义,文件包含) 2.提供可编程接口(常量,变量,数学计算,条件语句) 常量定义: name:base_length的值value ...
随机推荐
- Linux学习笔记之 Btrfs文件系统简介及使用
Btrfs 也有一个重要的缺点,当 BTree 中某个节点出现错误时,文件系统将失去该节点之下的所有的文件信息.而 ext2/3 却避免了这种被称为”错误扩散”的问题. Btrfs相关介绍: Btrf ...
- 57 和为S的数字
题目一:和为S的两个数字 输入一个递增排序的数组和一个数字S,在数组中查找两个数,使得他们的和正好是S,如果有多对数字的和等于S,输出两个数的乘积最小的. 输出描述: 对应每个测试案例,输出两个数,小 ...
- 理解Mysql prepare预处理语句
MySQL 5.1对服务器一方的预制语句提供支持.如果您使用合适的客户端编程界面,则这种支持可以发挥在MySQL 4.1中实施的高效客户端/服务器二进制协议的优势.候选界面包括MySQL C API客 ...
- 基础命令history
history 记录历史命令 环境变量: HISTSIZE: 命令历史记录的条数: HISTFILE: 命令历史记录的文件,~/.bash_history: HISTFILESIZE: 命令历史 ...
- 学习Android
=========================================today start to learn Android================= 我们学习需要的软件: jd ...
- 【Codeforces 385C】Bear and Prime Numbers
[链接] 我是链接,点我呀:) [题意] f[i]表示在x[]中有多少个数字是i的倍数 让你求出sum(f[i]) li<=i<=ri 且i是质数 [题解] 做筛法求素数的时候顺便把素数i ...
- Java基础学习总结(74)——Java常见笔试题及答案汇总
1. 下面哪些是合法的标识符?(ABE )--标识符 A. $persons B. TwoUsers C. *point D. this E. _endline 2. 下面程序运行的结果是( D )- ...
- 暑假集训D17总结
考试 玄学的一次考试= = T1乱搞 只会乱搞出前二十分 然后真的拿了二十分 T2模拟 自己造数据 没有一个是在十分钟内跳出来的 然后竟然A了 T3暴力 觉得如果老爷机心情不好就会被卡到20 然后 ...
- win7安装gmpy2
1.下载地址:https://pypi.python.org/pypi/gmpy2 2.安装python和pip python 安装 下载: https://www.python.org/getit/ ...
- const关键字作用
const int a; int const a; const int *a; int * const a; int const * a const; /******/ 前两个的作用是一样,a是一个常 ...