ROS-URDF-活动关节
前言:介绍活动关节,并使机器人活动起来。
参考自:http://wiki.ros.org/urdf/Tutorials/Building%20a%20Movable%20Robot%20Model%20with%20URDF
一、修改urdf文件
<?xml version="1.0"?>
<robot name="visual">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
</joint>
<link name="right_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="right_base_joint" type="fixed">
<parent link="right_leg"/>
<child link="right_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="right_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
</visual>
</link>
<joint name="right_front_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="right_base"/>
<child link="right_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="right_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="right_back_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="right_base"/>
<child link="right_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
</joint>
<link name="left_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="left_base_joint" type="fixed">
<parent link="left_leg"/>
<child link="left_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="left_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="left_base"/>
<child link="left_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="left_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_back_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="left_base"/>
<child link="left_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<joint name="gripper_extension" type="prismatic">
<parent link="base_link"/>
<child link="gripper_pole"/>
<limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>
<link name="gripper_pole">
<visual>
<geometry>
<cylinder length="0.2" radius="0.01"/>
</geometry>
<origin rpy="0 1.57075 0 " xyz="0.1 0 0"/>
</visual>
</link>
<joint name="left_gripper_joint" type="revolute">
<axis xyz="0 0 1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
</joint>
<link name="left_gripper">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="left_tip_joint" type="fixed">
<parent link="left_gripper"/>
<child link="left_tip"/>
</joint>
<link name="left_tip">
<visual>
<origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<joint name="right_gripper_joint" type="revolute">
<axis xyz="0 0 -1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.2 -0.01 0"/>
<parent link="gripper_pole"/>
<child link="right_gripper"/>
</joint>
<link name="right_gripper">
<visual>
<origin rpy="-3.1415 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="right_tip_joint" type="fixed">
<parent link="right_gripper"/>
<child link="right_tip"/>
</joint>
<link name="right_tip">
<visual>
<origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<link name="head">
<visual>
<geometry>
<sphere radius="0.2"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="head_swivel" type="continuous">
<parent link="base_link"/>
<child link="head"/>
<axis xyz="0 0 1"/>
<origin xyz="0 0 0.3"/>
</joint>
<link name="box">
<visual>
<geometry>
<box size="0.08 0.08 0.08"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<joint name="tobox" type="fixed">
<parent link="head"/>
<child link="box"/>
<origin xyz="0.1814 0 0.1414"/>
</joint>
</robot>
----------------------------------------------------------
代码解析:
<joint name="head_swivel" type="continuous">关节为连续型
<parent link="base_link"/>
<child link="head"/>
<axis xyz="0 0 1"/>限制只绕z轴旋转
<origin xyz="0 0 0.3"/>
</joint>
<joint name="left_gripper_joint" type="revolute">关节为旋转型
<axis xyz="0 0 1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>限定最大力度1000N,绕z周旋转弧度为0弧度-0.548弧度,最大速度为0.5m/s
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
</joint>
<joint name="gripper_extension" type="prismatic">关节类型为棱柱型,只能沿着轴移动,不能沿着轴转动。
<parent link="base_link"/>
<child link="gripper_pole"/>
<limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>
二、运行launch文件
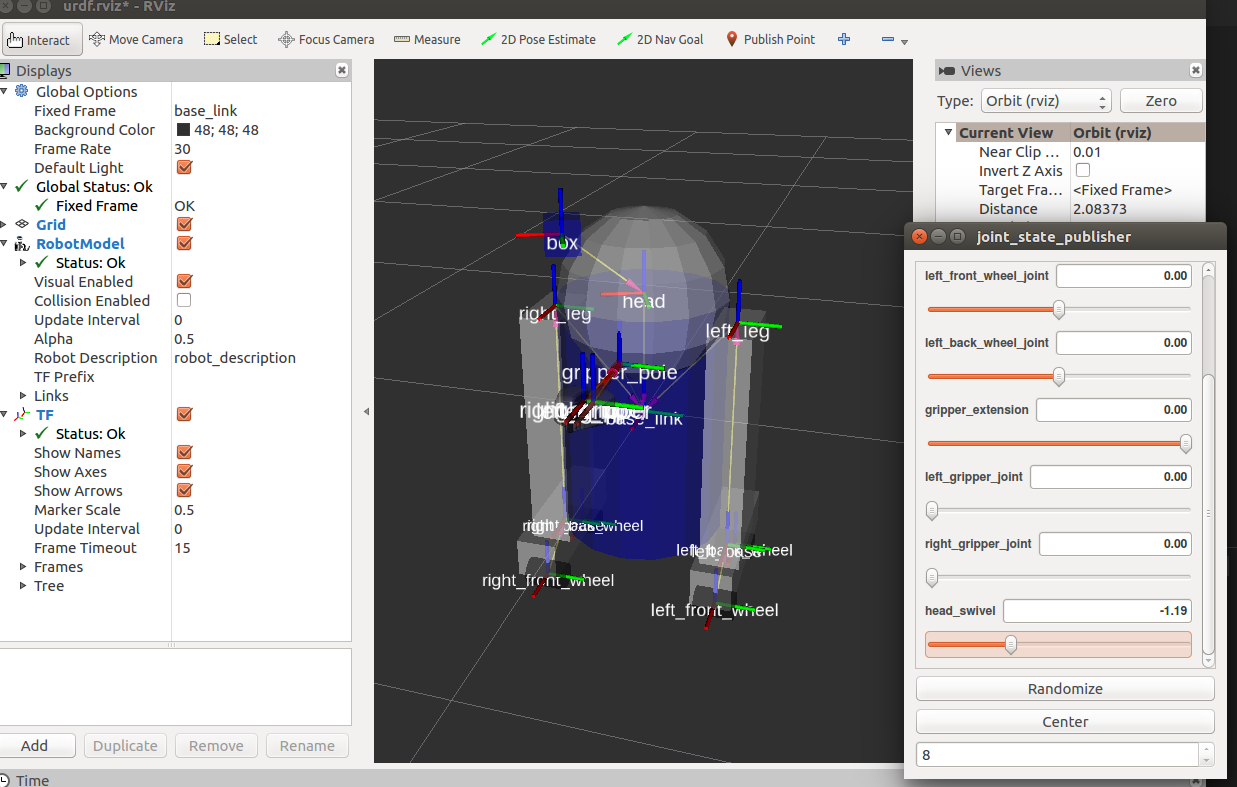
当您在GUI中移动滑块时,模型将在Rviz中移动。这是怎么做到的?首先,GUI解析URDF并找到所有非固定关节及其限制。然后,它使用滑块的值来发布sensor_msgs / JointState消息。然后robot_state_publisher使用它们来计算不同部分之间的所有变换。然后,生成的变换树用于显示Rviz中的所有形状。
-END-
ROS-URDF-活动关节的更多相关文章
- ROS(URDF机器人建模)
新建功能包mbot_description 在功能包下新建文件config,launch,meshes,urdf. 在launch文件夹下新建文件display_mbot_base_urdf.laun ...
- ROS urdf和xacro文件详解
视觉标签:visual <visual> <origin xyz="0.0 0.0 0.0" /> <geometry> <box siz ...
- 2017~ROS暑期学校~分享
http://www.robotics.sei.ecnu.edu.cn/ROS2017/ ---- 往年暑期学校活动:2015年,2016年 报名开始时间7月2日晚10点:暑期学校报名,机器人挑战赛报 ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- 【探索之路】机器人篇(3)-给mwRobot建立模型
在创建一个mwRobot_description程序包那一节中,我们添加了依赖roscpp rospy std_msgs 和 urdf , 现在我们再添加一个xacro依赖. 如何添加依赖? 打开程 ...
- 多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismati ...
- 软件篇-02-基于ZED 2和ORB_SLAM2的SLAM实践
时隔两周,我又回来了. 本期内容如题,ZED 2的SDK功能还是挺多的,包括轨迹跟踪,实时建图等等.虽然由于是商业产品,我看不到他们的源代码,但是根据使用情况来看,ZED 2内部是采用了IMU和光 ...
- <ROS> 机器人描述--URDF和XACRO
文章转自 https://blog.csdn.net/sunbibei/article/details/52297524 特此鸣谢原创作者的辛勤付出 1 URDF 文件 1.1 link和joint ...
- ROS(机器人URDF模型优化)
URDF模型 xacro优化后的URDF模型 1.精简模型代码(创建宏定义,文件包含) 2.提供可编程接口(常量,变量,数学计算,条件语句) 常量定义: name:base_length的值value ...
随机推荐
- accmcolor
accmcolor c; c.setcolorindex(1); playertablerecord.setcolor(c);
- 企业级mysql数据库完全备份、增量备份脚本
企业完全备份脚本 [root@client ~]# vim /opt/mysql_bak_wanbei.sh #!/bin/bash #MySQL数据库完全备份脚本 #设置登录变量 MY_USER=& ...
- 【转】关于JMeter线程组中线程数,Ramp-Up Period,循环次数之间的设置概念
关于JMeter线程组中线程数,Ramp-Up Period,循环次数之间的设置概念 笔者是个刚刚踏入压力测试领域不到2个月的小菜,这里分享一下线程组中3个参数之间关系的个人见解,不喜请!喷!,望大家 ...
- IE浏览器new Date()带参返回NaN解决方法
var start = '2016-01-01 12:12:12'; var date = new Date(start); 得到的时间为NaN: 解决方法: 1.自定义方法 自定义一个NewDate ...
- CVPR2016 Paper list
CVPR2016 Paper list ORAL SESSIONImage Captioning and Question Answering Monday, June 27th, 9:00AM - ...
- Linux学习总结(13)——在阿里云的ubuntu上部署个人服务
作为一个IT界的人,一般都希望有一个独立的博客,或者一部独立的机器.所以我一直在找机会,拥有一台自己可以独立控制的机器,自己想干嘛干嘛.当然这在虚拟机或者自己的PC上面也可以实现,但是这跟一台一直开着 ...
- RBAC(Role-Based Access Control)
http://hi.baidu.com/akini/blog/item/eddbd61b90f6d4fbae513371.html RBAC 求助编辑百科名片 基 于角色的访问控制(Role-Base ...
- UML类图符号解释
在UML类图中,常见的有以下几种关系: 泛化(Generalization)和 实现(Realization) - 父子关系 依赖(Dependency) - 局部变量.方法參数 聚合(Aggre ...
- java 线程 原子类相关操作演示样例 thinking in java4 文件夹21.3.4
java 线程 原子类相关操作演示样例 package org.rui.thread.volatiles; import java.util.Timer; import java.util.Time ...
- 【转】storm 开发系列一 第一个程序
原文: http://blog.csdn.net/csfreebird/article/details/49104777 --------------------------------------- ...