c语言数字图像处理(十):阈值处理
定义
全局阈值处理
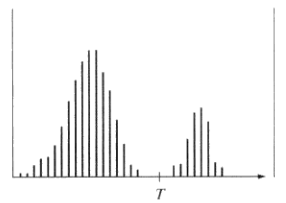
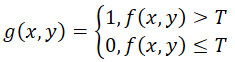
假设某一副灰度图有如下的直方图,该图像由暗色背景下的较亮物体组成,从背景中提取这一物体时,将阈值T作为分割点,分割后的图像g(x, y)由下述公式给出,称为全局阈值处理
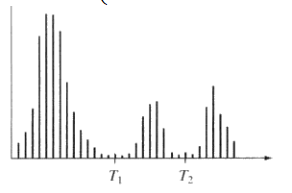
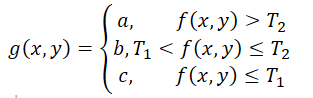
多阈值处理
本文仅完成全局阈值处理的算法实现
基本全局阈值处理方法
1. 为全局阈值T选择一个初始的估计值
2. 用T分割图像,产生两组像素:G1由大于T的像素组成,G2由小于T的像素组成
3. 对G1和G2的像素分别计算平均灰度值m1和m2
4. 计算新的阈值T = 1/2 * (m1 + m2)
5. 重复步骤2-4,直到连续迭代中的T值差小于一个预定义的参数ΔT
算法实现
void threshold(short** in_array, short** out_array, long height, long width, int delt_t)
{
double T = 0xff / 2.0;
double m1 = 0.0, m2 = 0.0;
int m1_num = , m2_num = ; while(dabs(T, 0.5*(m1 + m2)) > delt_t){
T = 0.5 * (m1 + m2);
m1 = 0.0;
m2 = 0.0;
m1_num = ;
m2_num = ; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
if (in_array[i][j] <= T){
m1 += in_array[i][j];
m1_num++;
}
else{
m2 += in_array[i][j];
m2_num++;
}
}
}
if (m1_num != )
m1 /= m1_num;
if (m2_num != )
m2 /= m2_num;
printf("%lf\n", T);
}
for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
if (in_array[i][j] <= T)
out_array[i][j] = 0xff;
else
out_array[i][j] = 0x00;
}
}
}
测试结果

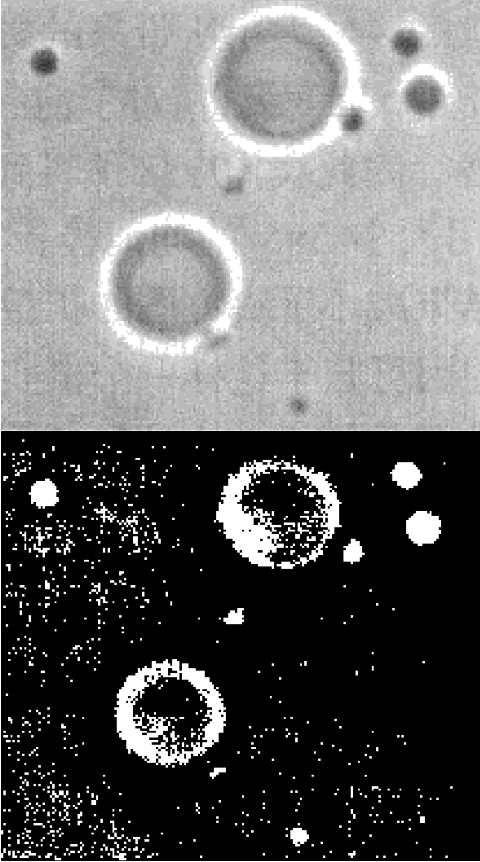
从实验结果看出,第二组阈值处理的效果并不好,因此考虑更优的算法实现
Otsu方法进行最佳全局阈值处理
阈值处理可视为一种统计决策理论问题,其目的是在把像素分配给两个或多个组的过程中引入的平均误差最小。这一问题有个闭合形式的解,称为贝叶斯决策规则。
Otsu方法在类间方差最大的情况下是最佳的
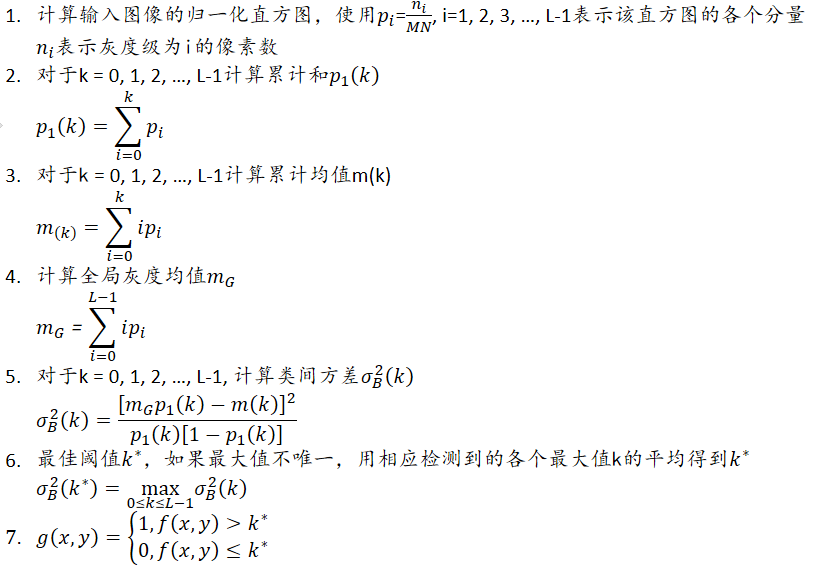
算法执行流程
代码实现
double dabs(double a, double b)
{
if (a < b)
return b-a;
else
return a-b;
} void calculate_histogram(long height, long width, short **image, unsigned long histogram[])
{
short k;
for(int i=; i < height; i++){
for(int j=; j < width; j++){
k = image[i][j];
histogram[k] = histogram[k] + ;
}
}
} void calculate_pi(long height, long width, unsigned long histogram[], double pi[])
{
for (int i = ; i < GRAY_LEVELS; ++i){
pi[i] = (double)histogram[i] / (double)(height * width);
}
} double p1(int k, double pi[])
{
double sum = 0.0; for (int i = ; i <= k; i++){
sum += pi[i];
} return sum;
} double m(int k, double pi[])
{
double sum = 0.0; for (int i = ; i <= k; i++){
sum += i * pi[i];
} return sum;
} double calculate_sigma(int k, double mg, double pi[])
{
double p1k = p1(k, pi);
double mk = m(k, pi); if (p1k < 1e- || ( - p1k) < 1e-)
return 0.0;
else
return pow(mg * p1k - mk, ) / (p1k * ( - p1k));
} void otsu(short** in_array, short** out_array, long height, long width)
{
unsigned long histogram[GRAY_LEVELS] = {};
double pi[GRAY_LEVELS] = {};
double sigma[GRAY_LEVELS] = {};
double mg;
short max_count = ;
short k = ;
double max_value = 0.0;
double k_star; calculate_histogram(height, width, in_array, histogram);
calculate_pi(height, width, histogram, pi);
mg = m(GRAY_LEVELS-, pi); for (int i = ; i < GRAY_LEVELS; i++)
sigma[i] = calculate_sigma(i, mg, pi); max_value = sigma[];
max_count = ;
k = ;
for (int i = ; i < GRAY_LEVELS; i++){
if (dabs(sigma[i], max_value) < 1e-){
k += i;
max_count++;
}
else if (sigma[i] > max_value){
max_value = sigma[i];
max_count = ;
k = i;
}
}
k_star = k / max_count; printf("%lf\n", k_star);
for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
if (in_array[i][j] <= k_star)
out_array[i][j] = 0x00;
else
out_array[i][j] = 0xff;
}
}
}
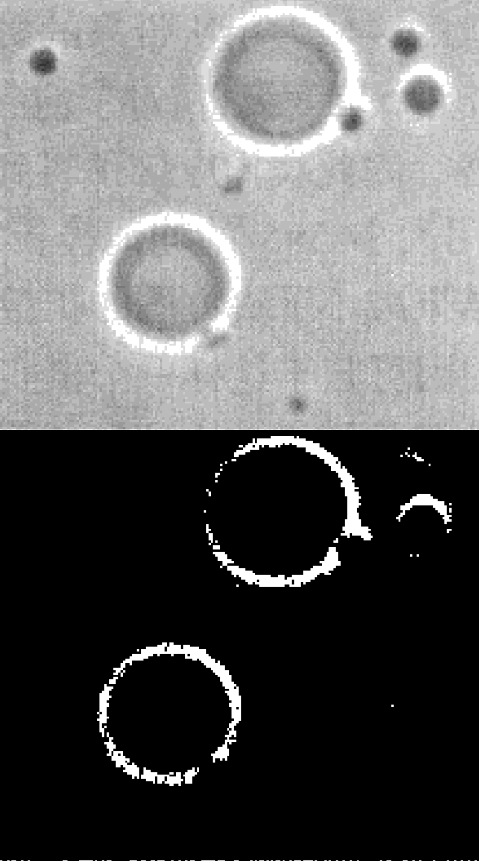
结果
c语言数字图像处理(十):阈值处理的更多相关文章
- c语言数字图像处理(三):仿射变换
仿射变换及坐标变换公式 几何变换改进图像中像素间的空间关系.这些变换通常称为橡皮模变换,因为它们可看成是在一块橡皮模上印刷一幅图像,然后根据预定的一组规则拉伸该薄膜.在数字图像处理中,几何变换由两个基 ...
- c语言数字图像处理(九):边缘检测
背景知识 边缘像素是图像中灰度突变的像素,而边缘是连接边缘像素的集合.边缘检测是设计用来检测边缘像素的局部图像处理方法. 孤立点检测 使用<https://www.cnblogs.com/Gol ...
- c语言数字图像处理(五):空间滤波
空间滤波原理 使用大小为m*n的滤波器对大小为M*N的图像进行线性空间滤波,将滤波器模板乘以图像中对应灰度值,相加得模板中心灰度值 a = (m-1)/2, b = (n-1)/2 若f(x+s, y ...
- c语言数字图像处理(二):图片放大与缩小-双线性内插法
图像内插 假设一幅大小为500 * 500的图像扩大1.5倍到750 * 750,创建一个750 * 750 的网格,使其与原图像间隔相同,然后缩小至原图大小,在原图中寻找最接近的像素(或周围的像素) ...
- c语言数字图像处理(一):bmp图片格式及灰度图片转换
本篇文章首先介绍了bmp图片格式,主要参考wiki上的内容,包括bmp文件的存储方式,对于一些常见的bmp文件格式都给了例子,并且对8位 16位RGB555 16位RGB565格式的bmp文件进行了简 ...
- c语言数字图像处理(八):噪声模型及均值滤波器
图像退化/复原过程模型 高斯噪声 PDF(概率密度函数) 生成高斯随机数序列 算法可参考<http://www.doc.ic.ac.uk/~wl/papers/07/csur07dt.pdf&g ...
- c语言数字图像处理(七):频率域滤波
代码运行了两个小时才出的结果,懒得测试了,这一部分先鸽了,等对DFT算法进行优化后再更
- c语言数字图像处理(六):二维离散傅里叶变换
基础知识 复数表示 C = R + jI 极坐标:C = |C|(cosθ + jsinθ) 欧拉公式:C = |C|ejθ 有关更多的时域与复频域的知识可以学习复变函数与积分变换,本篇文章只给出DF ...
- c语言数字图像处理(四):灰度变换
灰度变换 灰度变换函数 s = T(r) 其中r为输入图像在(x, y)点处的灰度值,s为输出图像在(x, y)点处的灰度值 灰度变换的作用 上图所示的两幅T(s)函数的图像曲线,第一幅图可以增强 ...
随机推荐
- lambda表达式和groovy闭包的区别
groovy定义的闭包是 Closure 的实例,lambda表达式只是在特定的接⼝或者抽象类的匿名实现,他们之间最主要区别闭包可以灵活的配置代理策略⽽labmda表达式不允许
- BZOJ1597:[USACO]土地购买(斜率优化DP)
Description 农夫John准备扩大他的农场,他正在考虑N (1 <= N <= 50,000) 块长方形的土地. 每块土地的长宽满足(1 <= 宽 < = 1,000 ...
- python-一个小爬虫,爬取图片
import re import urllib.request # 爬取网页 def getHtml(url): page=urllib.request.urlopen(url) html=page. ...
- 20145203盖泽双java实验三 敏捷开发与XP实践
java实验三 敏捷开发与XP实践 实验内容 XP基础 XP核心实践 相关工具 实验要求 1.没有Linux基础的同学建议先学习<Linux基础入门(新版)><Vim编辑器> ...
- c++ 堆和栈以及区别
c++中内存分成5个区:堆.栈.自由存储区.全局\静态存储区.常量存储区 栈是一种连续存储的数据结构,具有先进后出的性质.堆是一种非连续的树形存储数据结构,每个节点有一个值,整棵树是经过排序的,特点是 ...
- python基础整理7——爬虫——爬虫开发工具
HTTP代理神器Fiddler Fiddler是一款强大Web调试工具,它能记录所有客户端和服务器的HTTP请求. Fiddler启动的时候,默认IE的代理设为了127.0.0.1:8888,而其他浏 ...
- Python读文件报错:SyntaxError: Non-ASCII character in file
打开city.py文件时报错 问题原因: 程序中的编码错误,python默认是acii模式,没有支持utf8.如果代码中有汉字 ,就会报错 解决方案: 源代码文件(city.py)第一行添加:#cod ...
- 使用rosed编辑ROS中的文件
使用 rosed rosed是rosbash 的一部分. 利用它可以直接通过package名来获取到待编辑的文件而无需指定该文件的存储路径了. 使用方法: $ rosed [package_name] ...
- set集合HashSet
一: 和List接口同一级的还有Set接口,Set类型的集合,元素不能重复,存储顺序和迭代顺序没有必然联系.他的元素的唯一性是由hasCode和equals决定的. 他的子类,常用的HashSet和L ...
- MAC系统常用快捷键 基本常用的都整理在这里了
写在前面 Mac系统中有几个比较特殊的功能键,和Win系统的区别也主要在这里比如在Win系统中我们常用的Ctrl键,在Mac系统中对应的不是长得比较像的Cnotrol,而是Command键,貌似也是M ...