倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何声明定时器,使用定时器TON模块 TC3
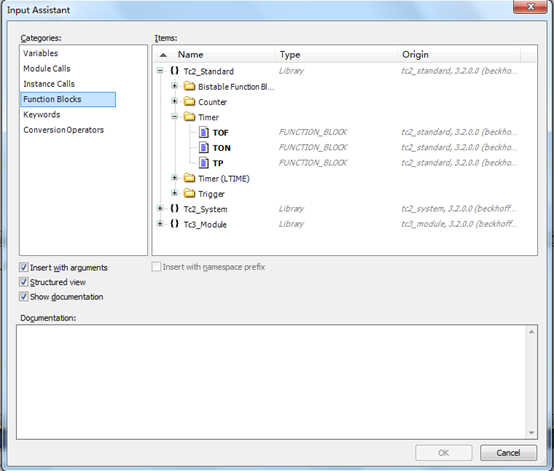
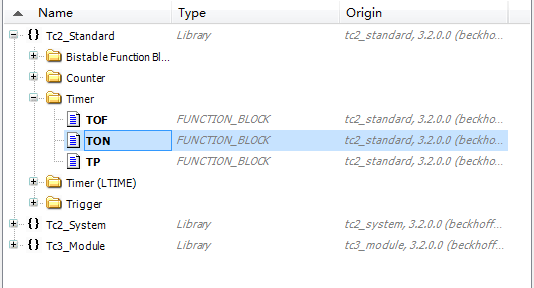
TON功能块功能:
当输入为高电平时,计时器开始计时,CV表示计时器计时的当前值,而PV则是计时的目标值,当CV的值等于PV的值时,输出置1。
在主程序接下去的地方按下F2并添加TON功能块。
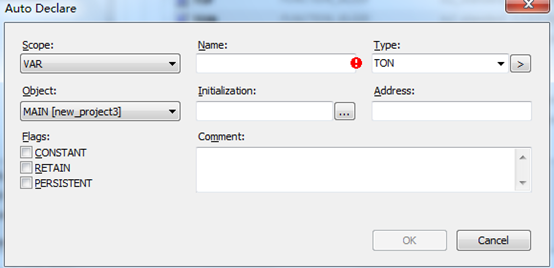
这里我取名为t1
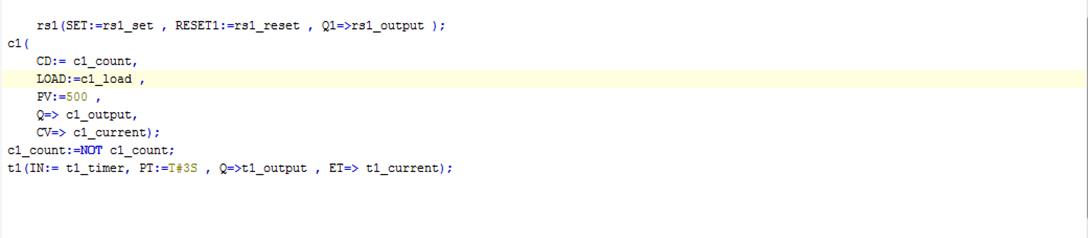
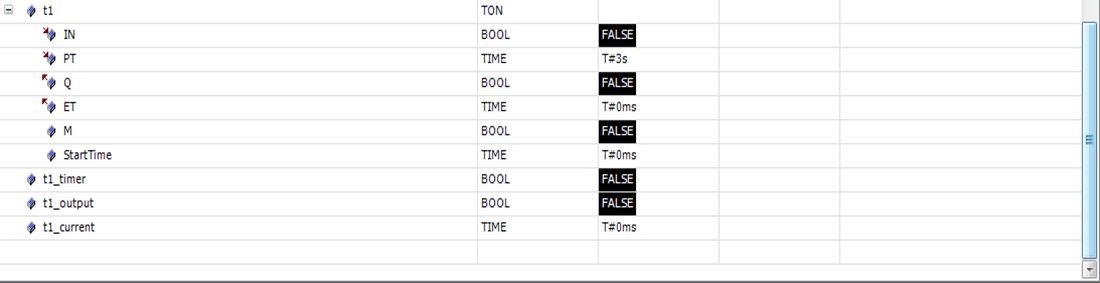
此处t1_timer,t1_output为bool量,t1_current为time量
点击 并
并 查看程序运行情况,部分如图:
查看程序运行情况,部分如图:
上图可以看见t1的当前情况,我们将t1_timer的值改为true,结果为
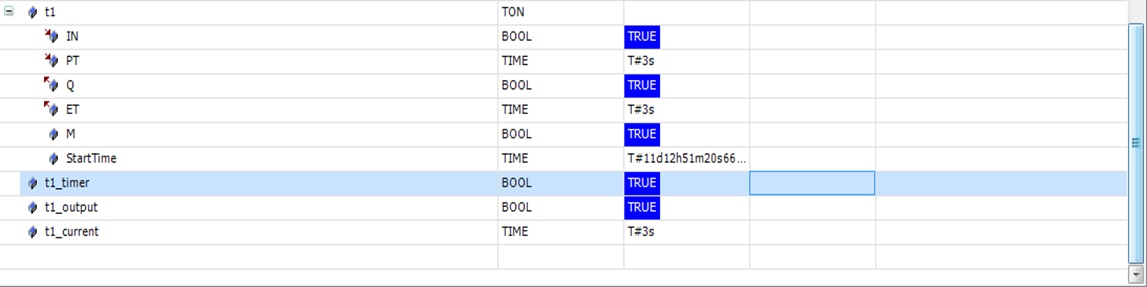
可见,当t1_cunrrent=3s时,Q被置为1。
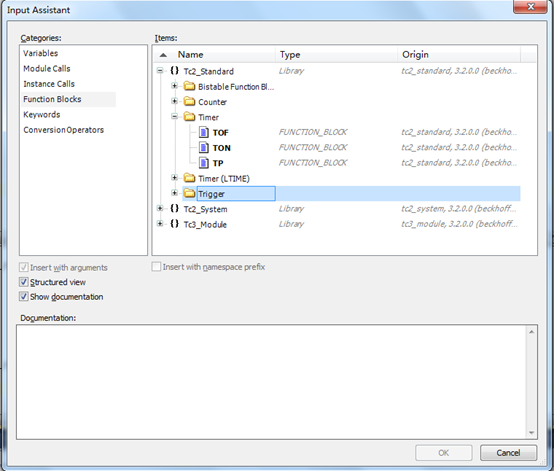
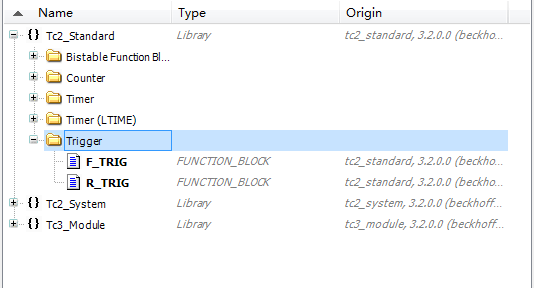
F-TRIG功能块
功能块功能:当输入产生一个下降沿,那么在接下来的一个周期内,输出将保持为1。
在主程序接下去的地方按下F2并添加F-TRIG功能块。
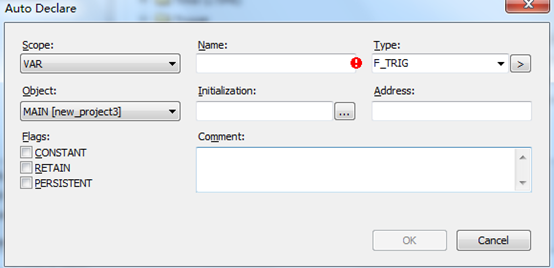
这里我取名为TRIG1 此处,trig1_clk,trig1_output均为bool量。
此处,trig1_clk,trig1_output均为bool量。
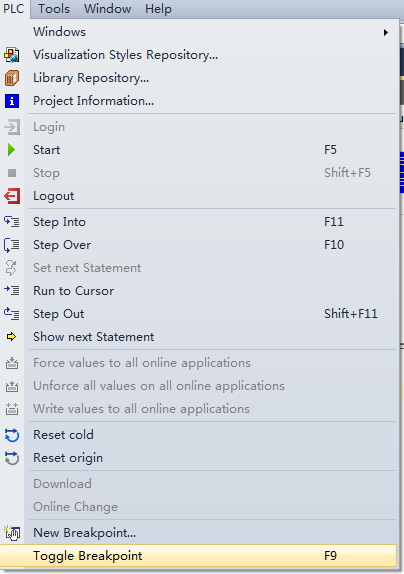
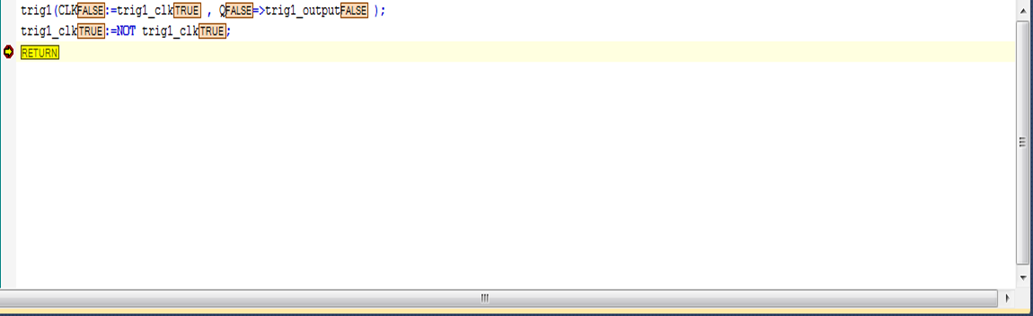
因为触发器的功能特殊,所以,在程序末端设立一个断点来看程序执行结果,在程序 以后,在程序最后有一个return,在此设立一个断点,方法如图:
以后,在程序最后有一个return,在此设立一个断点,方法如图:
因为触发器的功能特殊,所以,在程序末端设立一个断点来看程序执行结果,在程序 以后,在程序最后有一个return,在此设立一个断点,方法如图:
以后,在程序最后有一个return,在此设立一个断点,方法如图:
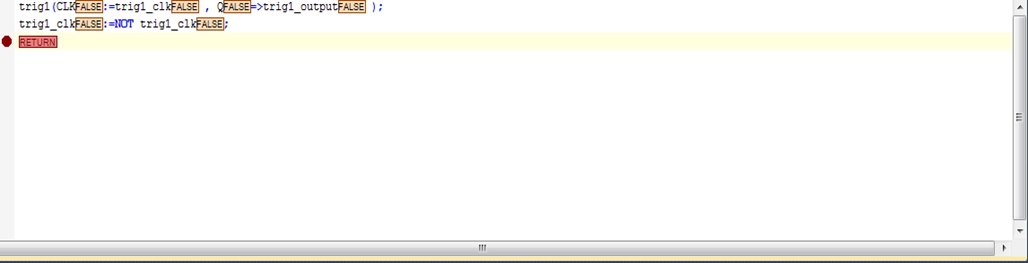
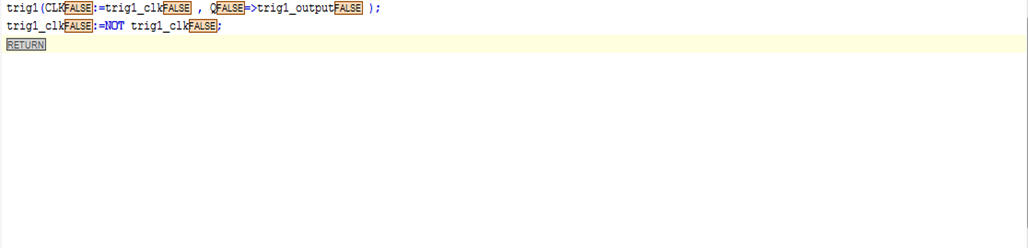
字变成红色表示现在RETURN所在的这一行是程序的断点,当程序运行起来后遇到断点便会停止运行。程序运行后此行会变成黄色且前方的行号处出现箭头。表示程序正停留在本行。
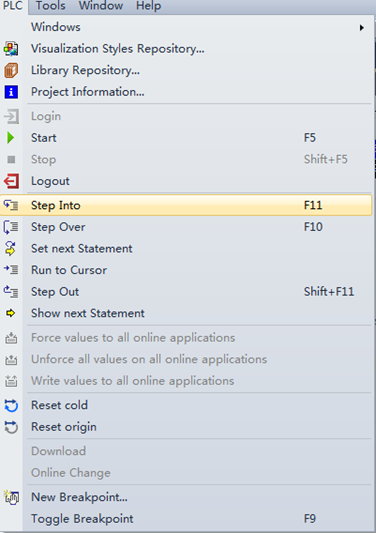
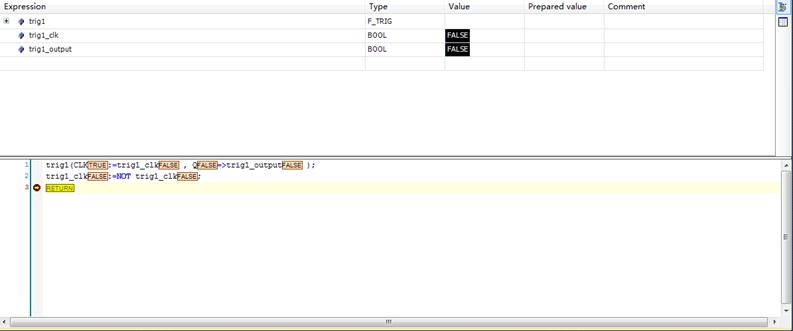
观察程序运行情况,此时trig1_clk为true按键盘F11或者在PLC中找到step into便可为实现单步执行。
一直STEP INTO 直到出现下图:此时trig1_clk正好是下降沿,按照F-trig功能接下来trig1_output将会变成true,如图
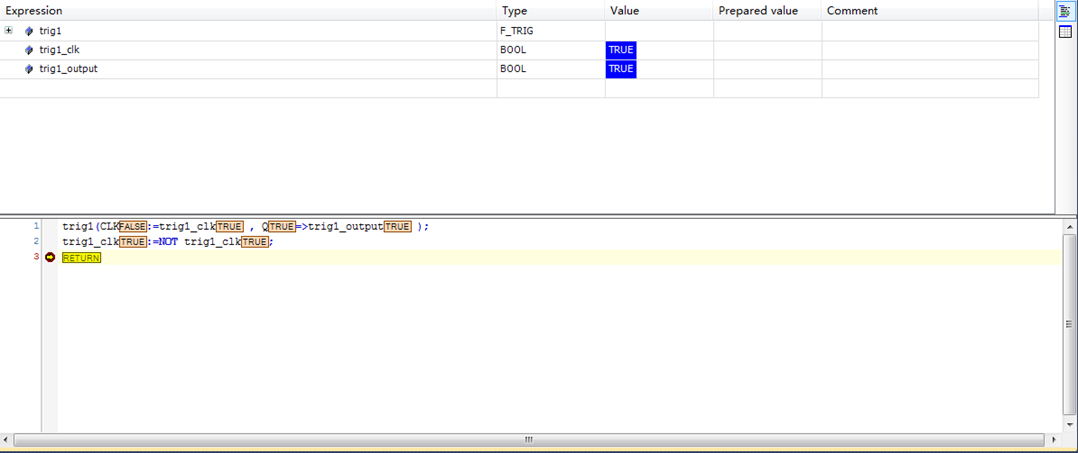
并在一个PLC周期后变回false,所以功能块测试完毕。

更多教学视频和资料下载,欢迎关注以下信息:
我的优酷空间:
http://i.youku.com/acetaohai123

我的在线论坛:
http://csrobot.gz01.bdysite.com/
问题交流:
QQ:910358960
倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何声明定时器,使用定时器TON模块 TC3的更多相关文章
- 倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-T_AmsNetID是什么
该参数是包含六个数字类似于IP地址的字符串形式,例如"1.1.1.2.7.1",如果为空字符串,则默认使用本机的AmsNetID 你可以右击贝福的图标,然后点击About查看当前本 ...
- 倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-TwinCAT自带的找原点功能块MC_Home怎么用
对于相对编码器类型轴(包括虚拟轴),可以使用贝福提供的找原点功能块MC_Home. HomingMode是指机器在往前跑的时候(30单位/s的默认速度),当碰到阻挡,则会有一个布尔值从FALSE改 ...
- 倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-报错0X4655,18005错误怎么办
首先确认驱动器没有报错(如果驱动器报错,请先解决绝对值编码器的清除多圈数据问题) 报错一般上使能就会报错,没法测试运转,而且不管是用贝福自带的NC功能还是自己写的都会一样的效果 请删除在贝福的Et ...
- 倍福TwinCAT(贝福Beckhoff)基础教程1.2 TwinCAT安装配置
由于TC2和TC3都有可能用到,个人推荐都安装,但是注意必须是先安装的TwinCAT2,然后安装TwinCAT3,如果反了可能两个都没法用(打开TcSwitchRuntime提示Both TwinCA ...
- 倍福TwinCAT(贝福Beckhoff)应用教程13.1 TwinCAT控制松下伺服 NC高级
本节主要演示了使用自定义函数实现电机的运动(梯形曲线和S曲线都有实现),这里的JOG+和JOG-,针对单个关节实现了PTP的运动(跟贝福的MoveAbsolute功能块实现效果一致),在此没有介绍运动 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程12.3 TwinCAT控制松下伺服 NC进阶
在前面一节,我们简单介绍了通过PLC+HMI实现完整控制松下伺服的上使能-运动,采集位置,速度等功能,这里我们会大量简化用到的贝福功能块(为了更加实用).首先依然是对单个轴的封装,我们之前的做法,例如 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程12.2 TwinCAT控制松下伺服 NC初步
在前面我们已经学会了使用贝福自带的调试软件完成试运行,接下来是使用TWINCAT PLC实现这个功能,右击PLC添加一个PLC项目 在VISUs上右击添加一个HMI人机界面 目前PLC程序和人 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程12.1 TwinCAT控制松下伺服 连接和试运行
首先是用松下伺服自带的软件可以测试运行(驱动器,电机都连接好,然后用USB线连接到松下伺服驱动器的X1口),打开调试软件会自动提示连接到伺服 一般需要对驱动器清除绝对值编码器数据(驱动器可能报错4 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程11.1 TwinCAT应用小程序1 如何读写数字量模拟量输入输出(DI,DO,AI,AO)
常见的模拟量模块(还有更高端和更低端的,使用方法都一样) EL3054和EL4024(4路模拟量输入和输出模块) 常见的数字量模块(还有更高端和更低端的,使用方法都一样) EL1809和EL280 ...
- 倍福TwinCAT(贝福Beckhoff)基础教程6.1 TwinCAT如何与高级语言通讯
因为使用TwinCAT的人用途不同,重视点就不同.如果用来代替传统PLC+HMI做项目的,很少会需要用到跟高级语言通讯,但是如果是用来做运动控制平台如做机器人运动控制器的,就肯定会用到.不管是否用得上 ...
随机推荐
- Python urllib2 设置超时时间并处理超时异常
可以使用 except: 捕获任何异常,包括 SystemExit 和 KeyboardInterupt,不过这样不便于程序的调试和使用 最简单的情况是捕获 urllib2.URLError try: ...
- BZOJ2654/COGS1764 [2012国家集训队]tree(陈立杰) [生成树,二分]
BZOJ传送门,COGS传送门 tree Description 给你一个无向带权连通图,每条边是黑色或白色.让你求一棵最小权的恰好有need条白色边的生成树. 题目保证有解. Input 第一行V, ...
- win7家庭版如何获得管理员权限?
1.首先,打开你的命令提示符,输入cmd.有一点非常重要,如图所示,我们必须“以管理员的方式打开”.只有以管理员身份打开,那么接下来要敲打的命令才会成功. 2. 打开命令提示符后,在输入框输入net ...
- HTML5+中动态构建列表并填充数据
部分代码参考demo----<历史上的今天>. 感谢作者的分享,愿好人一生平安,虽然只有两个页面,但是通过这个示例让我学会了5+中如何动态构建列表并填充数据,非常实用. html部分: & ...
- POJ 3662 Telephone Lines (分层图)
Telephone Lines Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6785 Accepted: 2498 D ...
- bzoj 3203: [Sdoi2013]保护出题人 凸包
题目大意: http://www.lydsy.com/JudgeOnline/problem.php?id=3203 题解 首先我们考虑对一大波僵尸来袭的情况进行分析 假设来袭的僵尸是\(\{ a_1 ...
- 【点分治】Osipovsky Cup 2014 Kovrov, Sunday, December 21, 2014 Problem A. Attack and Defence
题意:给你一棵树,每个点有一个左括号或者右括号,问你树上能够完美匹配的路径数量(l->r,r->l 视作不同路径). 点分治可以使用“不扣去重复答案”的写法,只不过,要先将每个点的子树按照 ...
- 【Java】【高精度】【递推】UVA - 11375 - Matches
d[i+c[j]]+=d[i](c[j]是拼成j所需的火柴数) d[0]=1: 别忘了不能有前导零,所以当i为零时,不要尝试去拼成零.反而应该在n>=6时,最后给答案加1(单独拼出0). imp ...
- Codeforces Beta Round #3 C. Tic-tac-toe 模拟题
C. Tic-tac-toe 题目连接: http://www.codeforces.com/contest/3/problem/C Description Certainly, everyone i ...
- Understanding how SQL Server executes a query
https://www.codeproject.com/Articles/630346/Understanding-how-SQL-Server-executes-a-query https://ww ...