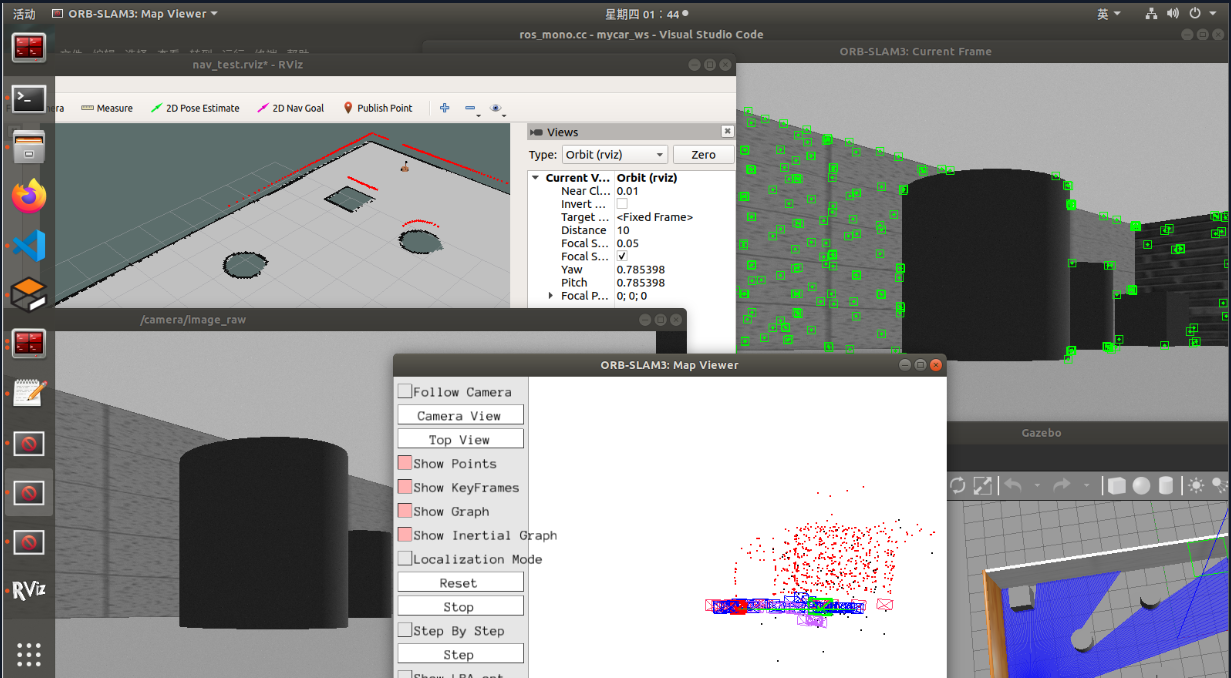
Gazebo、Rviz 结合 ORB-SLAM3 实现运动规划及定位
基于以下内容,详见博客链接
参考链接
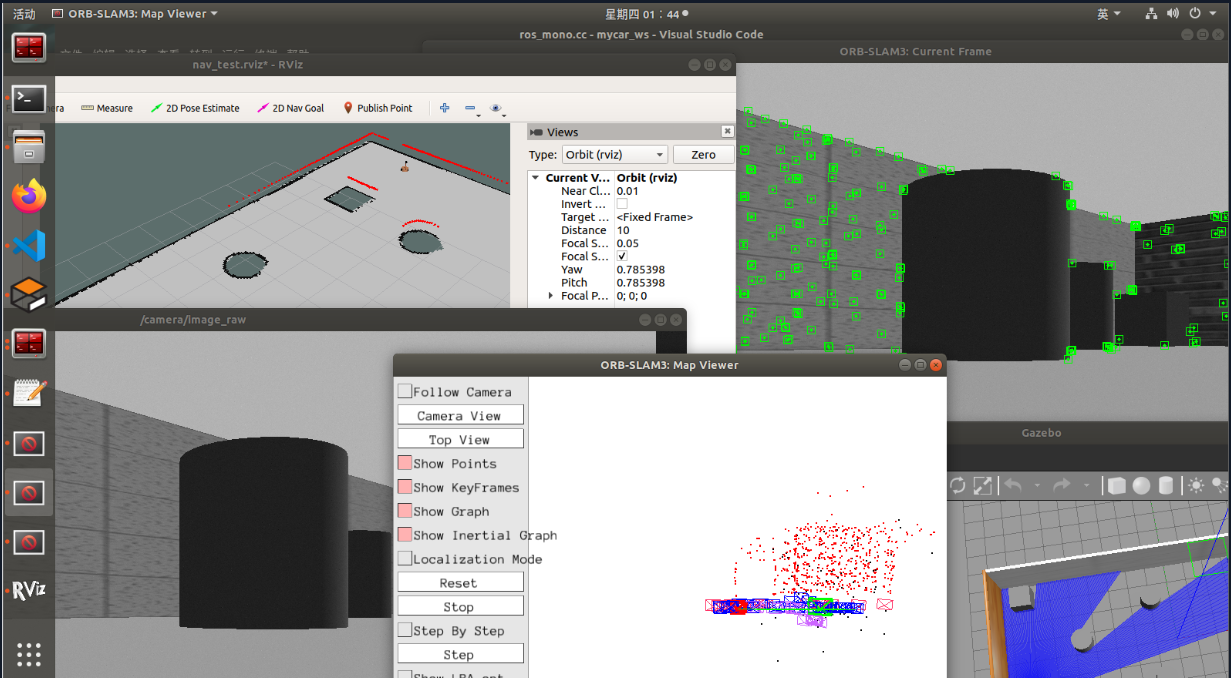
成果图
STEP1: 安装摄像头驱动
(1)笔记本摄像头
sudo apt-get install ros-melodic-uvc-camera
(2)USB摄像头
sudo apt-get install ros-melodic-usb-cam
STEP2: 安装image相关功能包
sudo apt-get install ros-melodic-image-*
sudo apt-get install ros-melodic-rqt-image-view
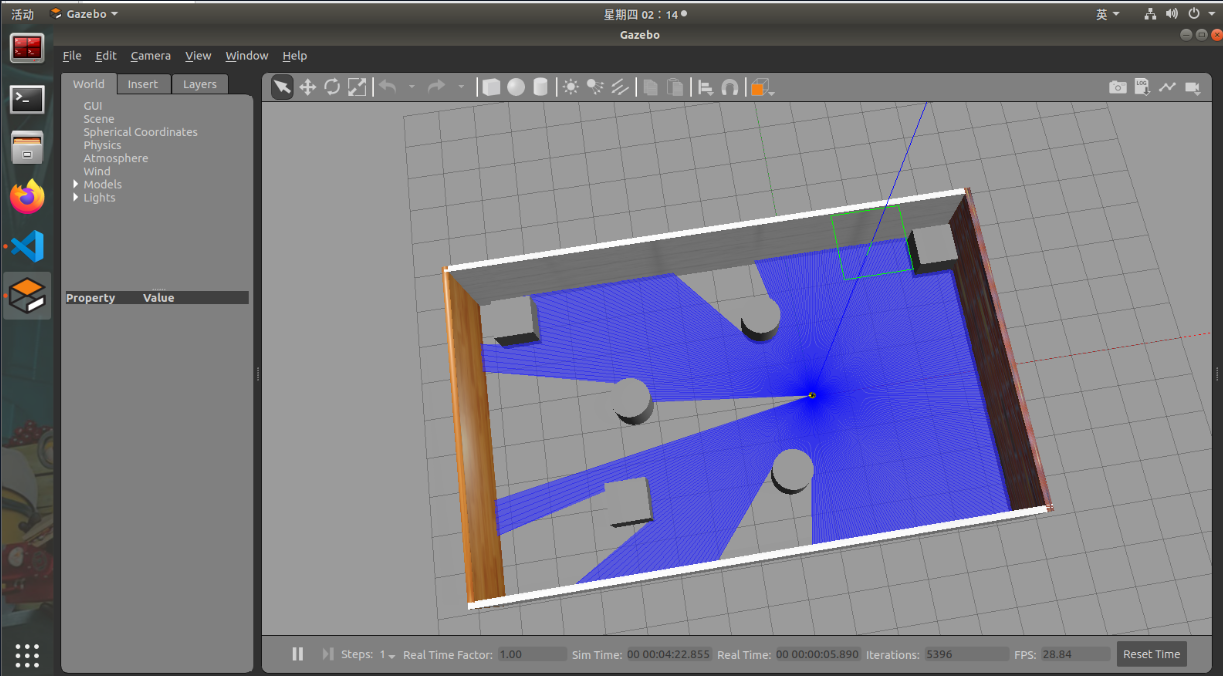
STEP3: 启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch

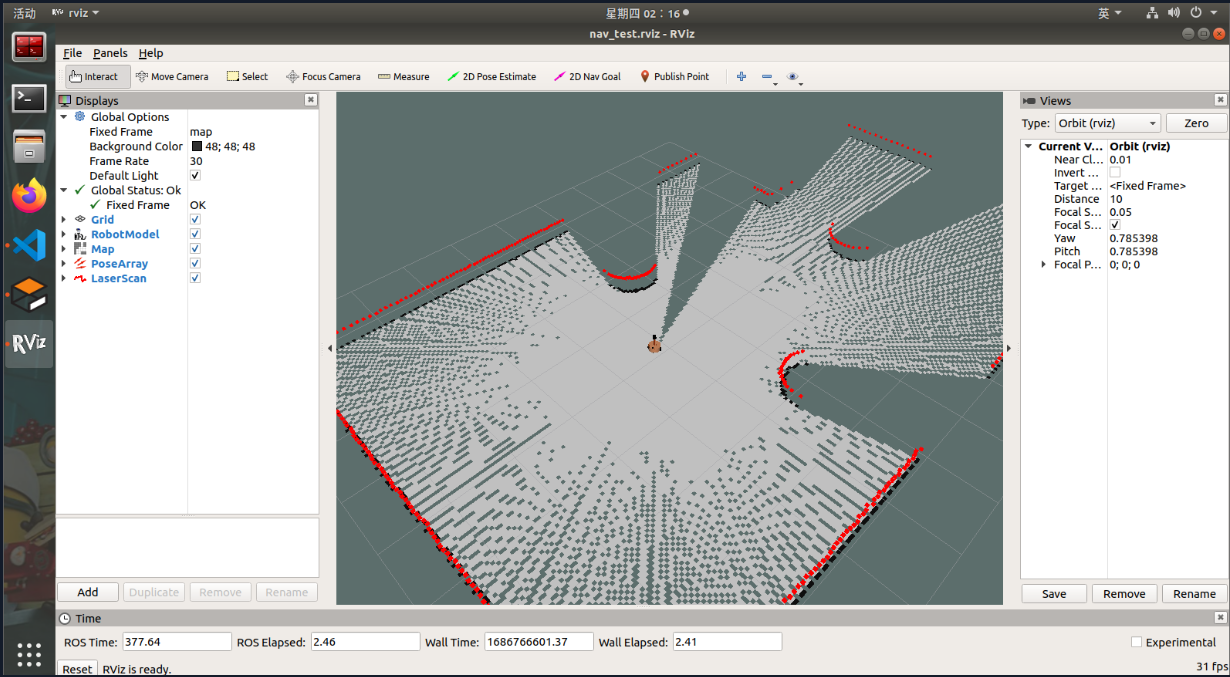
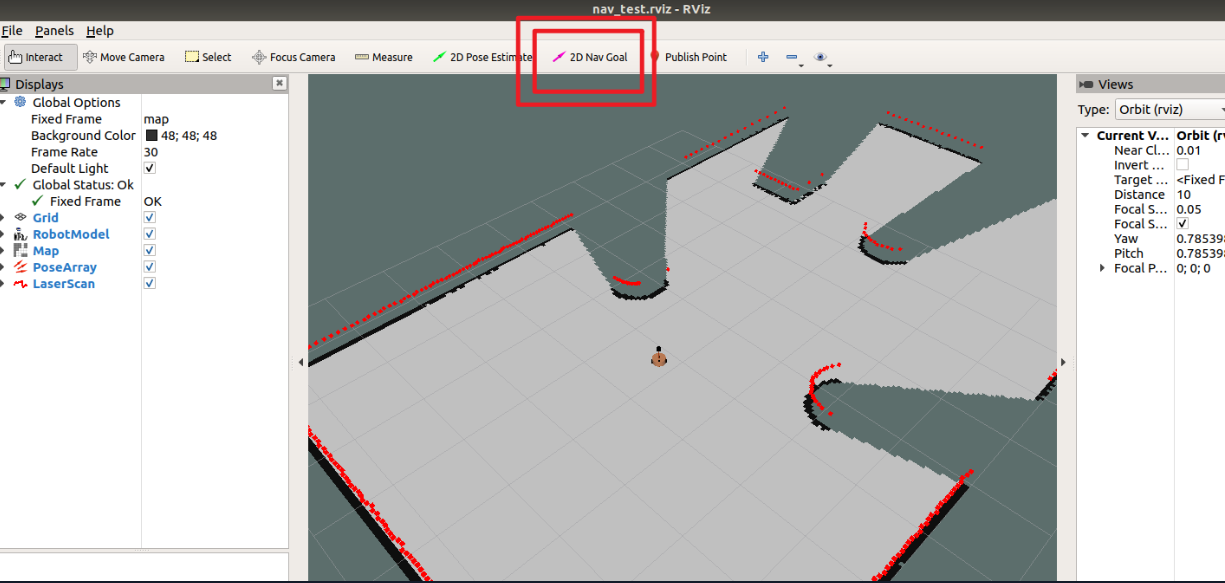
STEP4: 启动 rviz 相关节点
source ./devel/setup.bash
roslaunch nav_demo nav07_slam_auto.launch

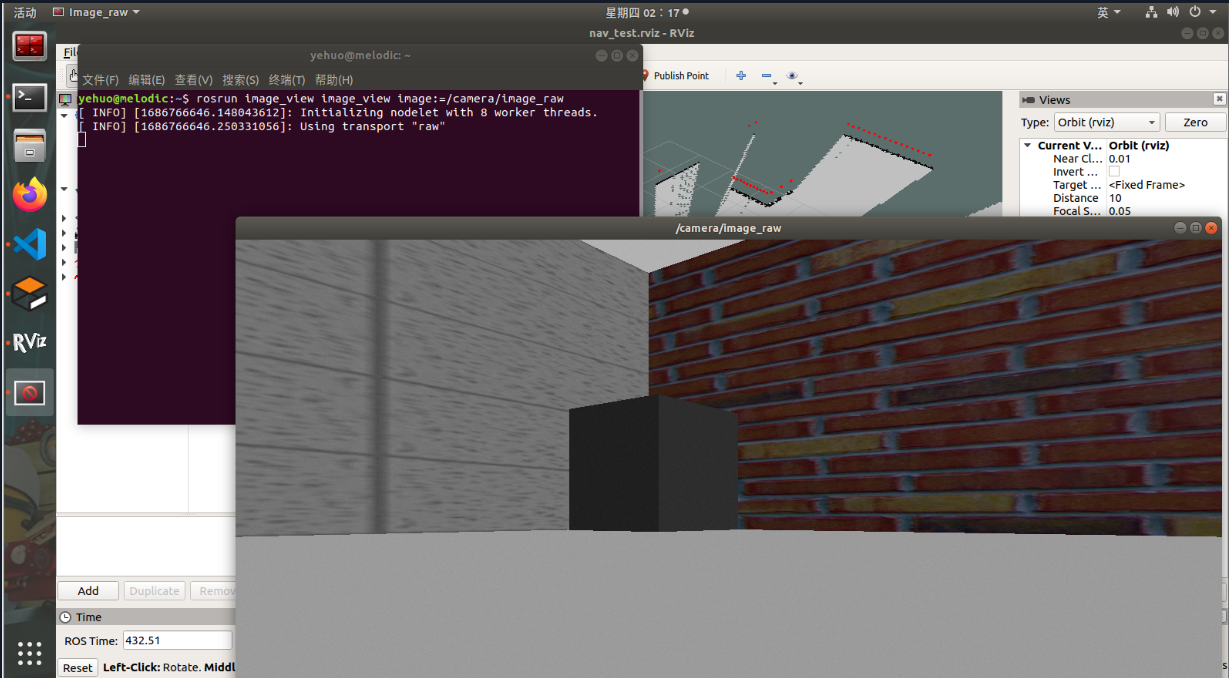
STEP5: 启动相机节点
rosrun image_view image_view image:=/camera/image_raw
STEP6: 启动 ORB-SLAM3
rosrun ORB_SLAM3 Mono /home/yehuo/SLAM/ORB_SLAM3-master/Vocabulary/ORBvoc.txt /home/yehuo/SLAM/ORB_SLAM3-master/Examples/ROS/ORB_SLAM3/Asus.yaml
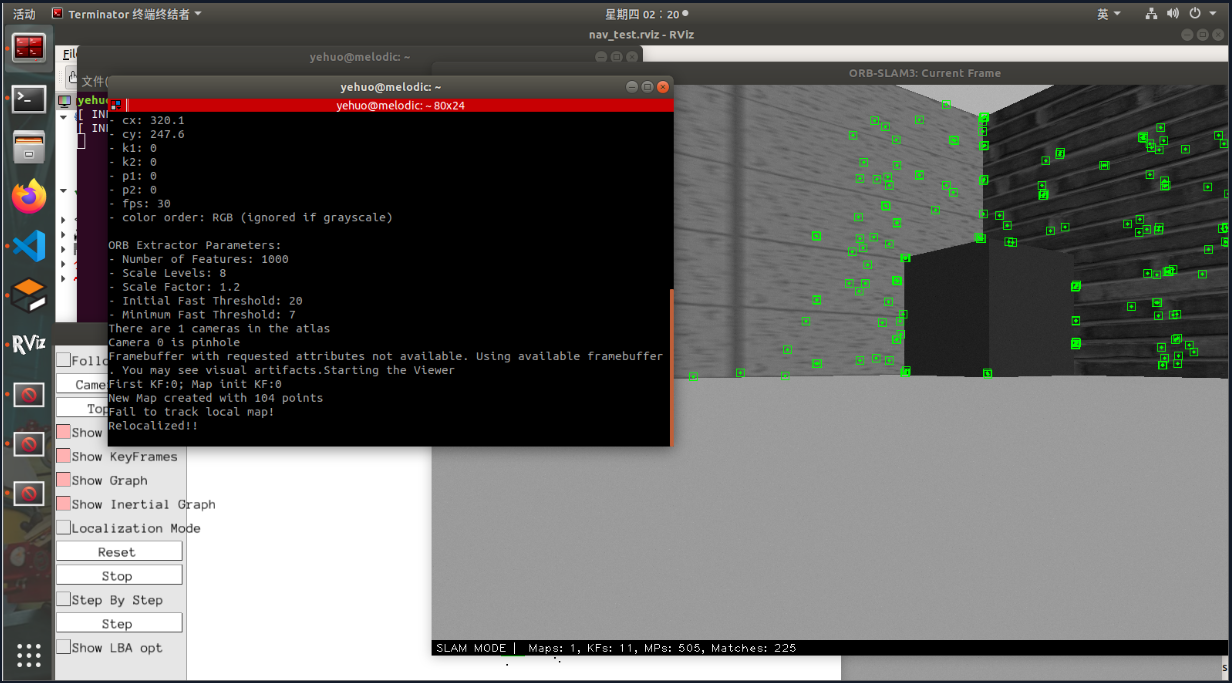
STEP7: 测试
测试小车运动规划以及定位功能
Gazebo、Rviz 结合 ORB-SLAM3 实现运动规划及定位的更多相关文章
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 如何用MoveIt快速搭建机器人运动规划平台?
MoveIt = RobotGo,翻译成中文就是“机器人,走你!”所以,MoveIt的主要就是一款致力于让机器人能够自主运动及其相关技术的软件,它的所有模块都是围绕着运动规划的实现而设计的. 两个月前 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- MoveIt运动规划-1
按照帮助文档Setup Assistant Tutorial中的描述,用moveit_setup_assistant图形界面一步步配置机器人,最后生成机器人的配置文件保存到指定的文件夹中. 以UR5机 ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中, 它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划, 自动驾驶汽车也会遇到这个问题.他可能处于高速公路的附近的街道网络中,他 ...
- 自动驾驶运动规划-Reeds Shepp曲线
自动驾驶运动规划-Reeds Shepp曲线 相比于Dubins Car只允许车辆向前运动,Reeds Shepp Car既允许车辆向前运动,也允许车辆向后运动. Reeds Shepp Car运动规 ...
随机推荐
- 浅谈Array --JavaScript内置对象
Array --JavaScript内置对象 描述 可以用一个变量存储多种数据类型的Array对象,Array不是关联数组,不能使用字符串作为索引访问数组元素,需要使用非负整数的下标访问数组中的元素. ...
- 开源不到 48 小时获 35k star 的推荐算法「GitHub 热点速览」
本周的热点除了 GPT 各类衍生品之外,还多了一个被马斯克预告过.在愚人节开源出来的推特推荐算法,开源不到 2 天就有了 35k+ 的 star,有意思的是,除了推荐算法本身之外,阅读源码的工程师们甚 ...
- Helm 安装 Kubernetes 监控套件
Helm 安装 Grafana Prometheus Altermanager 套件 安装helm # 安装helm工具 curl -fsSL -o get_helm.sh https://raw.g ...
- pandas之分组操作
在数据分析中,经常会遇到这样的情况:根据某一列(或多列)标签把数据划分为不同的组别,然后再对其进行数据分析.比如,某网站对注册用户的性别或者年龄等进行分组,从而研究出网站用户的画像(特点).在 Pan ...
- odoo 开发入门教程系列-约束(Constraints)
约束(Constraints) 上一章介绍了向模型中添加一些业务逻辑的能力.我们现在可以将按钮链接到业务代码,但如何防止用户输入错误的数据?例如,在我们的房地产模块中,没有什么可以阻止用户设置负预期价 ...
- 【Voyage】GDOI 2023 旅游记 || ECHO.
\(\color{#FFFFFF}{那是什么样的旅途呢}\) \(\color{#FFFFFF}{真的会害怕很多东西呢.想想害怕的其实不止这样一件事,便产生了"其实都一样没关系的,都应该踏过 ...
- Burp Suite最新版本专业版激活2022.12.1附原文件
Burp Suite 攻击web 应用程序的集成平台 Burp Suite 是用于攻击web 应用程序的集成平台,包含了许多工具.Burp Suite为这些工具设计了许多接口,以加快攻击应用程序的过程 ...
- Java学习笔记05
1. 方法概述 概念 方法(method)是程序中最小的执行单元. 注意: 方法必须先创建才可以使用,该过程称为方法的定义. 方法创建后并不是直接可以运行的,进行方法的调用才会执行. 2. 方法的 ...
- Python ArcPy批量计算多时相遥感影像的各项元平均值
本文介绍基于Python中ArcPy模块,对大量长时间序列栅格遥感影像文件的每一个像元进行多时序平均值的求取. 在遥感应用中,我们经常需要对某一景遥感影像中的全部像元的像素值进行平均值求取-- ...
- 从零开始TP6配置ThinkPHP-ApiDoc
系统:windows11 集成环境:小皮(原phpstudy) composer:2.5 准备工作:安装小皮后,在软件管理中安装composer,2.3安装不上去,只能安装1.8.5,没关系安装后升级 ...