Gazebo、Rviz 结合 ORB-SLAM3 实现运动规划及定位
基于以下内容,详见博客链接
参考链接
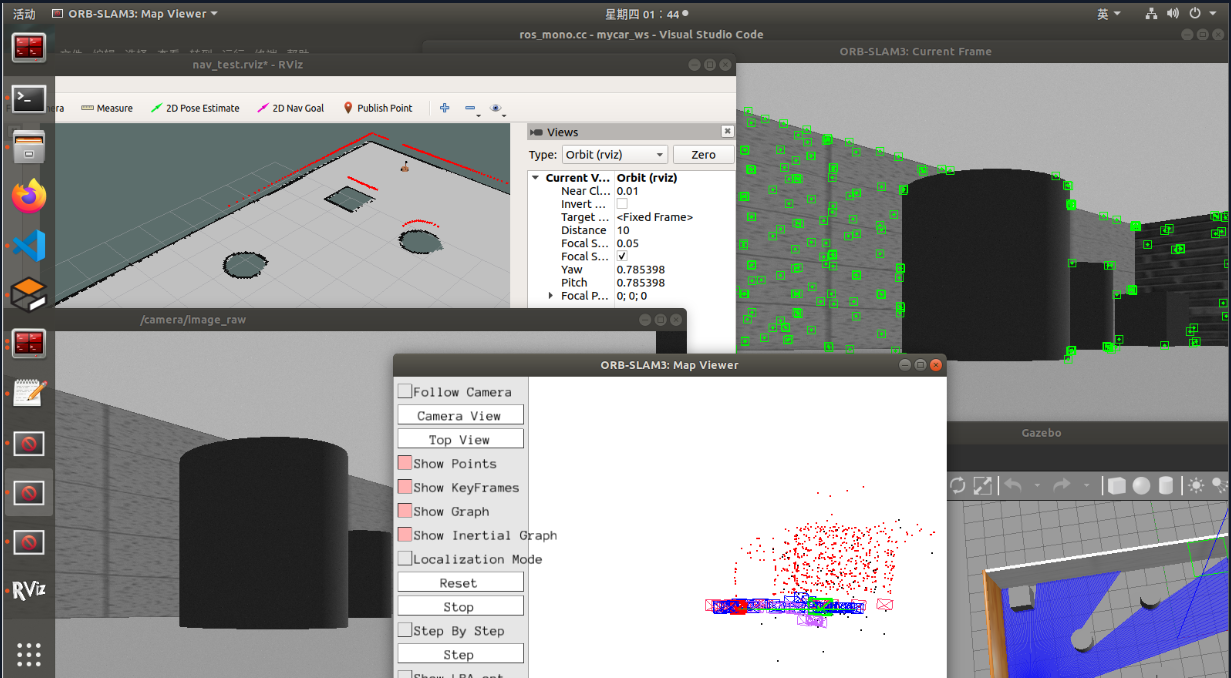
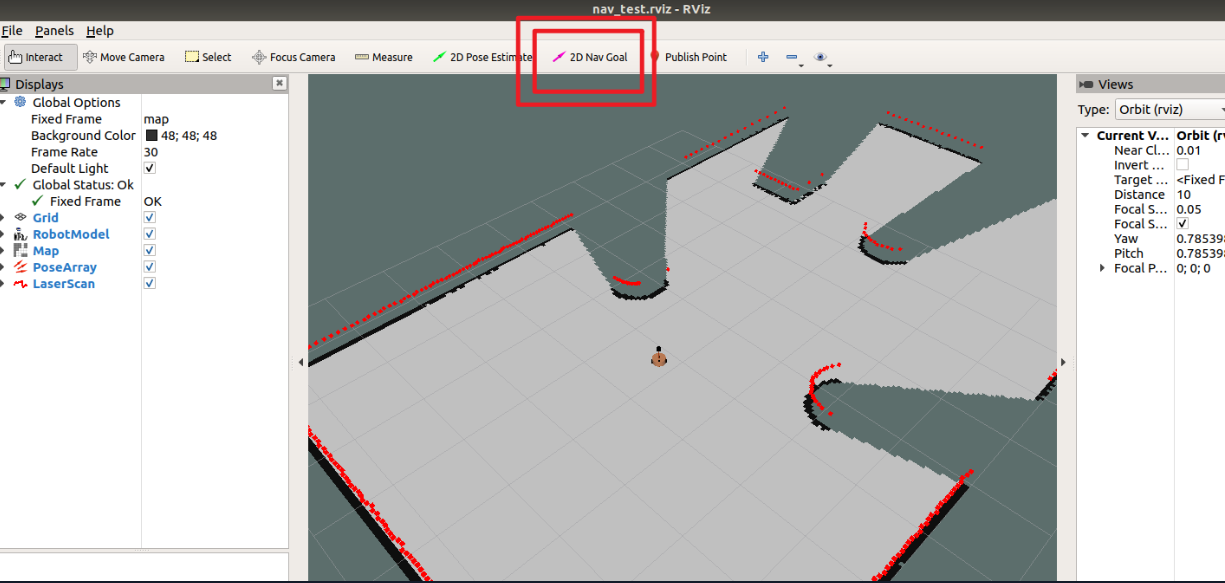
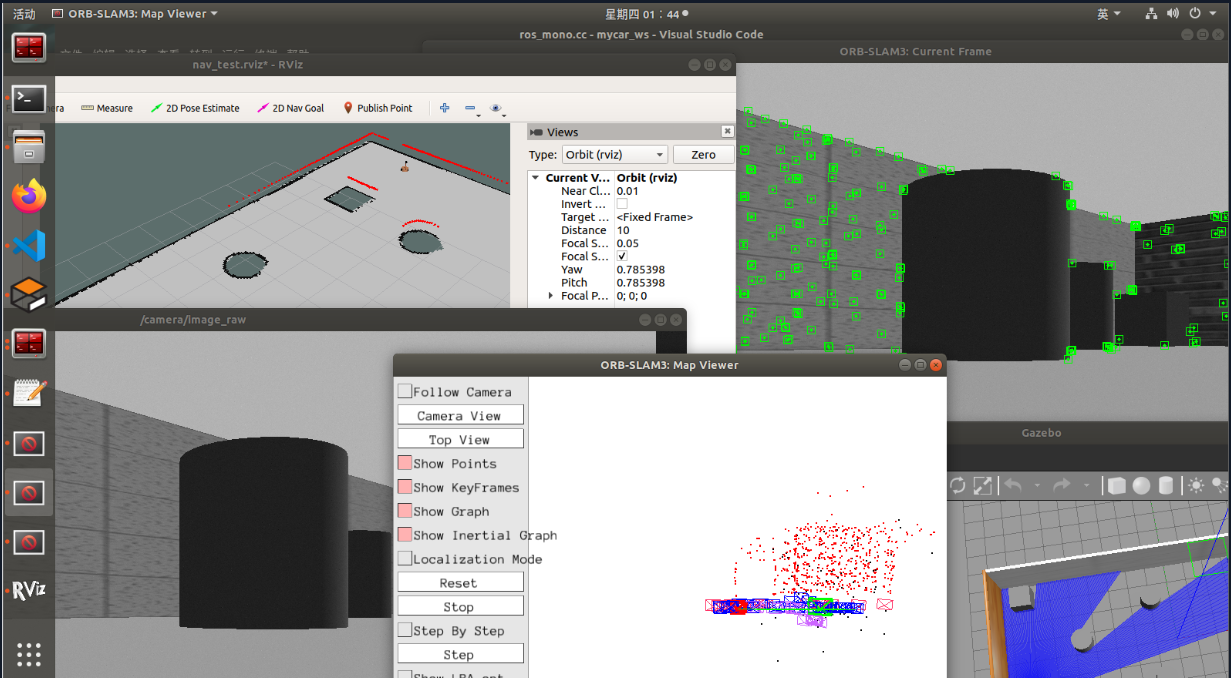
成果图
STEP1: 安装摄像头驱动
(1)笔记本摄像头
sudo apt-get install ros-melodic-uvc-camera
(2)USB摄像头
sudo apt-get install ros-melodic-usb-cam
STEP2: 安装image相关功能包
sudo apt-get install ros-melodic-image-*
sudo apt-get install ros-melodic-rqt-image-view
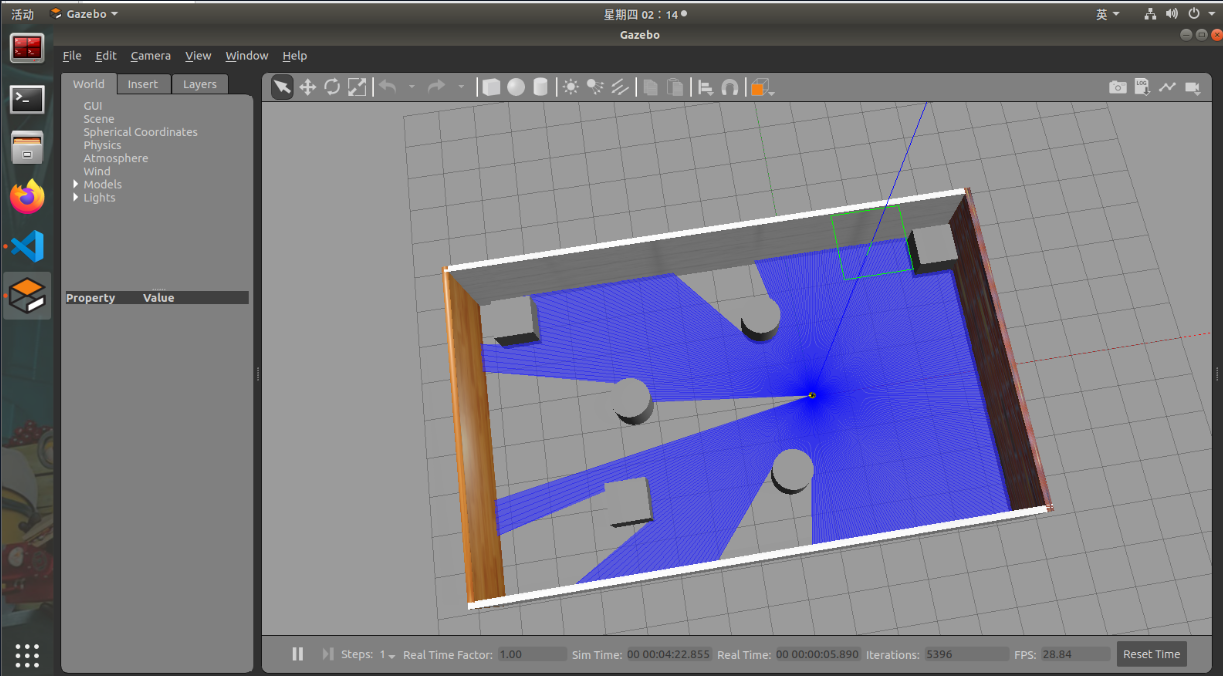
STEP3: 启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch

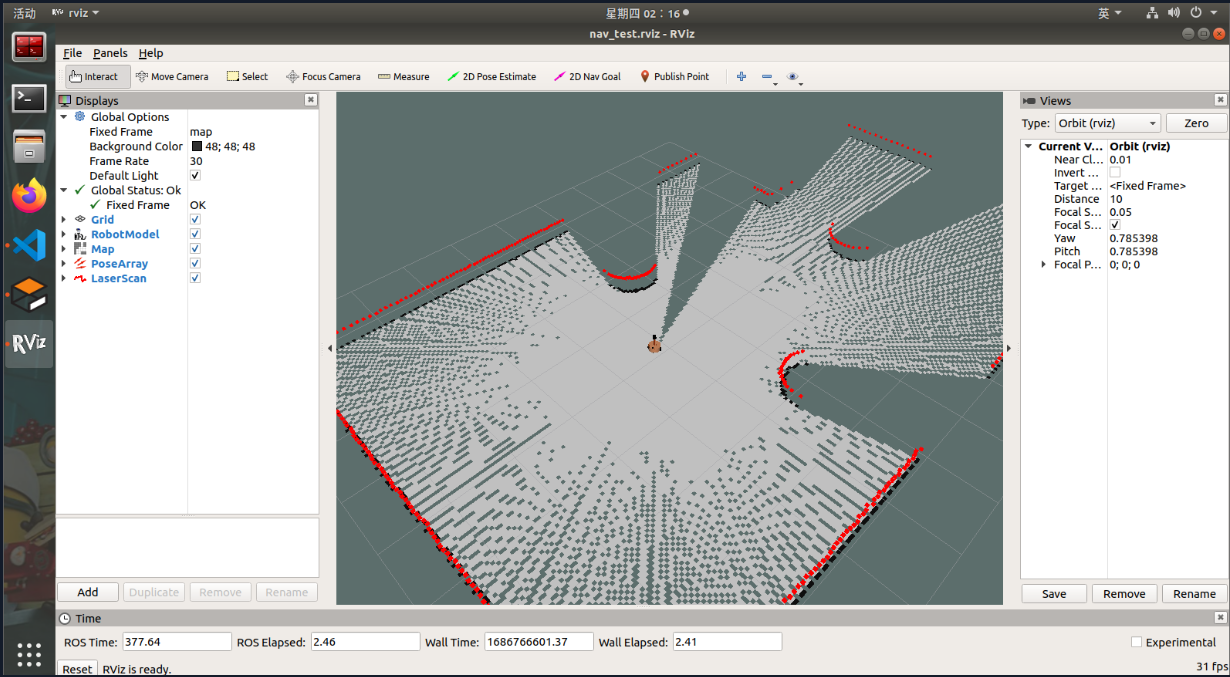
STEP4: 启动 rviz 相关节点
source ./devel/setup.bash
roslaunch nav_demo nav07_slam_auto.launch

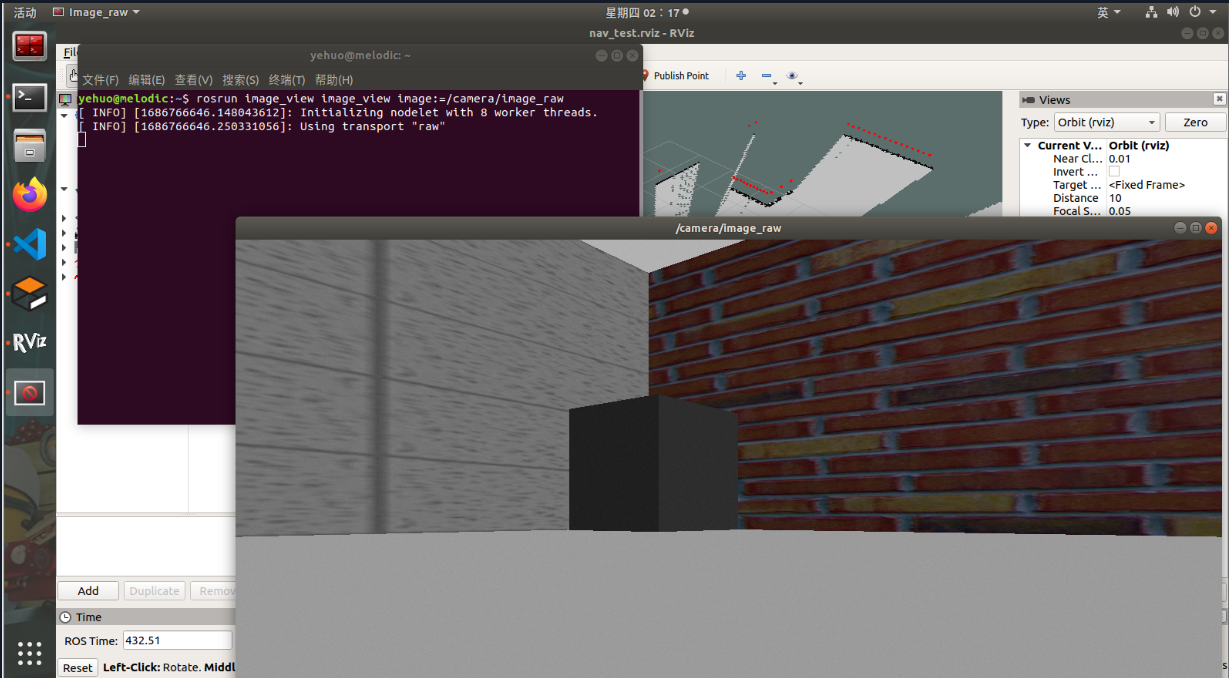
STEP5: 启动相机节点
rosrun image_view image_view image:=/camera/image_raw
STEP6: 启动 ORB-SLAM3
rosrun ORB_SLAM3 Mono /home/yehuo/SLAM/ORB_SLAM3-master/Vocabulary/ORBvoc.txt /home/yehuo/SLAM/ORB_SLAM3-master/Examples/ROS/ORB_SLAM3/Asus.yaml
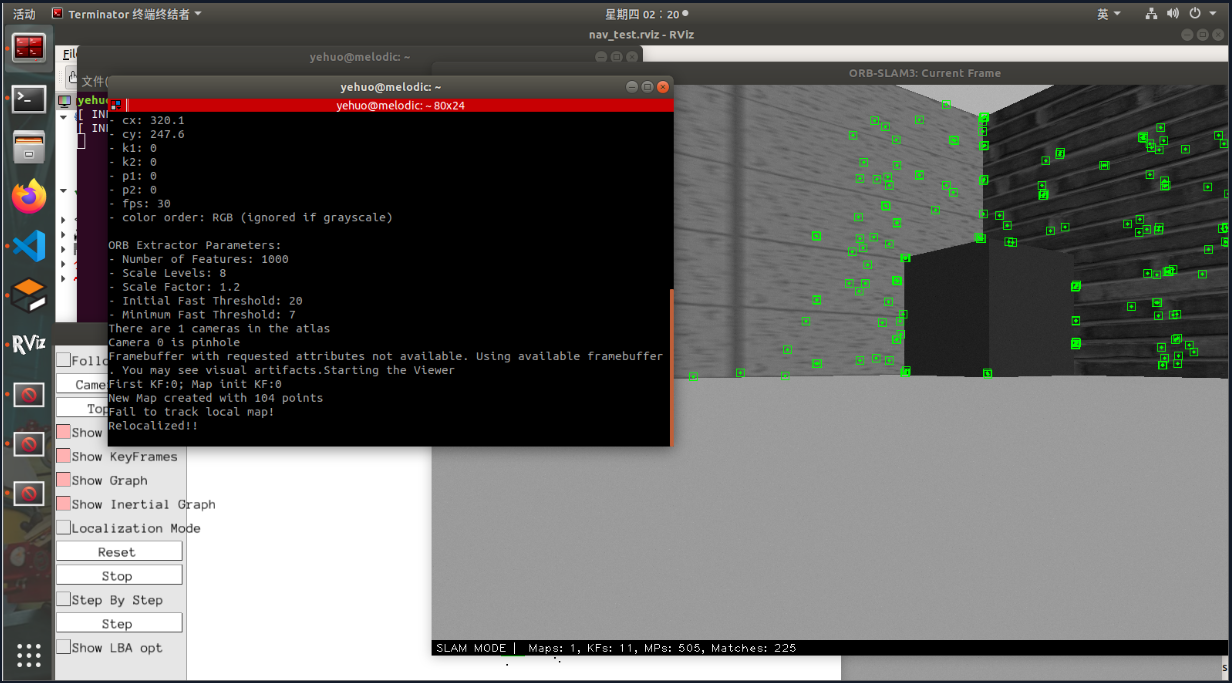
STEP7: 测试
测试小车运动规划以及定位功能
Gazebo、Rviz 结合 ORB-SLAM3 实现运动规划及定位的更多相关文章
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 如何用MoveIt快速搭建机器人运动规划平台?
MoveIt = RobotGo,翻译成中文就是“机器人,走你!”所以,MoveIt的主要就是一款致力于让机器人能够自主运动及其相关技术的软件,它的所有模块都是围绕着运动规划的实现而设计的. 两个月前 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- MoveIt运动规划-1
按照帮助文档Setup Assistant Tutorial中的描述,用moveit_setup_assistant图形界面一步步配置机器人,最后生成机器人的配置文件保存到指定的文件夹中. 以UR5机 ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中, 它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划, 自动驾驶汽车也会遇到这个问题.他可能处于高速公路的附近的街道网络中,他 ...
- 自动驾驶运动规划-Reeds Shepp曲线
自动驾驶运动规划-Reeds Shepp曲线 相比于Dubins Car只允许车辆向前运动,Reeds Shepp Car既允许车辆向前运动,也允许车辆向后运动. Reeds Shepp Car运动规 ...
随机推荐
- 【过滤器设计模式详解】C/Java/JS/Go/Python/TS不同语言实现
简介 过滤器模式(Filter Pattern)或标准模式(Criteria Pattern),是一种结构型模式.这种模式允许使用不同的标准条件来过滤一组对象,并通过逻辑运算的方式把各条件连接起来,它 ...
- 搭建DHCP服务,实现自动分配地址
DHCP实现原理 DHCP定义 DHCP(Dynamic Host Configuration Protocol,动态主机配置协议)是一个局域网的网络协议,使用UDP协议工作.它是一种流行的Clien ...
- CommunityToolkit.Mvvm8.1 viewmodel源生成器写法(3)
本系列文章导航 https://www.cnblogs.com/aierong/p/17300066.html https://github.com/aierong/WpfDemo (自我Demo地址 ...
- xtrabackup8.0.27备份失败
问题描述:mysql8.0.27备份出现中断,重新备份发现xtrabackup备份失败,xtrabackup与mysql版本不匹配,后来想起来时mysql进行了升级,8.0.27->8.0.29 ...
- Docker Compose 部署GitLab
先决条件 Docker Engine和Docker Compose是必需的.请参阅在CentOS上安装Docker Engine. 建议使用4核的服务器,同时至少分配4G的内存,理论上4核4G可最多支 ...
- If选择语句的用法
今天我们学习下If判断语句. 首先了解下它有几种用法: If单选择语句 If双选择语句 If多选择语句 我们一个一个用,每一个用法都给一个运用的过程演练一下. If单选择语句:我们很多需要判断一个东西 ...
- 玩转云端 | 算力基础设施升级,看天翼云紫金DPU显身手!
数字时代下,算力成为新的核心生产力,传统以CPU为核心的架构难以满足新场景下快速增长的算力需求,具备软硬加速能力的DPU得以出现并快速发展.天翼云凭借领先的技术和丰富的应用实践自研紫金DPU,打造为云 ...
- 统计机器学习-Introduction to Statistical Learning-阅读笔记-CH4-Classification
response variable: quantitative qualitative / categorical methods for classification first predict t ...
- Network Science: 巴拉巴西网络科学阅读笔记
前言: 最小生成树中Kruskal算法对应了统计物理中的著名模型invasion percolation.由此写了一篇文章:invasion percolation and global optimi ...
- Git代码提交规范
1. 引言 思想,因人而异,难以重复 写代码时,每个人的习惯是不一样的,所以,引入了代码规范,为了省力,引入了自动格式化代码工具,前端工程中比较典型的自动格式化代码工具如:Prettier · Opi ...