Ros学习——创建ROS消息和ROS服务
1.rosed
rosed 是 rosbash 的一部分。利用它可以直接通过package名来获取到待编辑的文件而无需指定该文件的存储路径了。
rosed默认的编辑器是vim。修改其他的,打开~/.bashrc 文件,增加:
export EDITOR='emacs -nw'
2.消息和服务
消息(msg): msg文件就是一个描述ROS中所使用消息类型的简单文本。它们会被用来生成不同语言的源代码。msg文件存放在package的msg目录下。
msg文件实际上就是每行声明一个数据类型和变量名。可以使用的数据类型如下:
int8, int16, int32, int64 (plus uint*)
float32, float64
string
time, duration
other msg files
variable-length array[] and fixed-length array[C]
服务(srv): 一个srv文件描述一项服务。它包含两个部分:请求和响应。srv文件则存放在srv目录下。
srv文件分为请求和响应两部分,由'---'分隔。
3.msg
- 1.在之前创建的package里定义新的消息
$ cd ~/catkin_ws/src/beginner_tutorials
$ mkdir msg
$ echo "int64 num" > msg/Num.msg
- 2.确保msg文件被转换成为C++,Python和其他语言的源代码
查看package.xml, 确保它包含一下两条语句:
<build_depend>message_generation</build_depend>
<run_depend>message_runtime</run_depend>
- 3.打开CMakeLists.txt文件,利用find_packag函数,增加对message_generation的依赖
# Do not just add this line to your CMakeLists.txt, modify the existing line
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation)
- 4.确保你设置了运行依赖:
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
- 5.修改add_message_files
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# ) 改为: add_message_files(
FILES
Num.msg
)
- 6.添加了如下代码:
generate_messages()
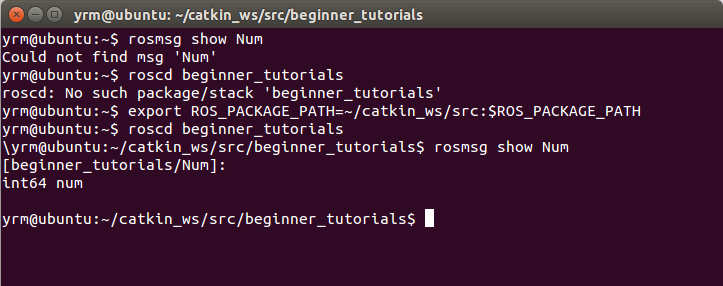
- 7.使用rosmsg
$ rosmsg show beginner_tutorials/Num #或者
$ rosmsg show Num
结果:
4.srv
- 1.创建一个服务
$ roscd beginner_tutorials
$ mkdir srv
- 2.新建/赋值一个服务文件
$ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
- 3.确保srv文件被转换成C++,Python和其他语言的源代码:CMakeLists.txt文件中增加了对message_generation的依赖
# Do not just add this line to your CMakeLists.txt, modify the existing line
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation)
- 4.修改add_message_files
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# ) #改为: add_service_files(
FILES
AddTwoInts.srv
)
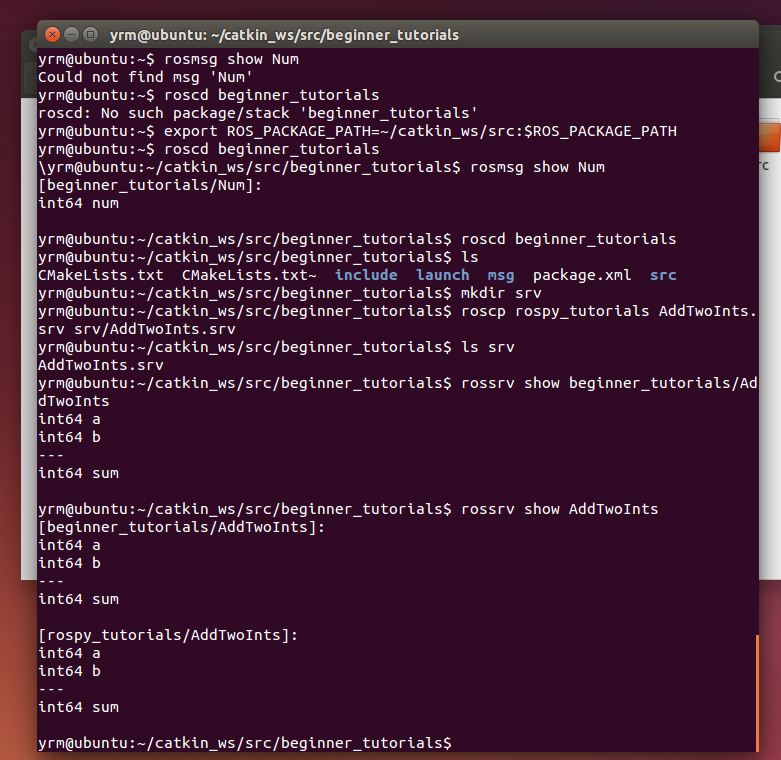
- 5.使用rossrv
$ rossrv show beginner_tutorials/AddTwoInts
#或者
$ rossrv show AddTwoInts
- 6.结果
Ros学习——创建ROS消息和ROS服务的更多相关文章
- ROS学习笔记三(理解ROS节点)
要求已经在Linux系统中安装一个学习用的ros软件包例子: sudo apt-get install ros-indigo-ros-tutorials ROS图形概念概述 nodes:节点,一个节点 ...
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- ROS学习(二)—— 配置ROS环境
一.管理环境 p { margin-bottom: 0.25cm; line-height: 120% } a:link { } 如果你在查找和使用ROS软件包方面遇到了问题,请确保你已经正确配置了脚 ...
- ROS学习笔记(一) # ROS参数服务器
参考 roscpp/Overview/Parameter Server 0. 概述 ROS参数服务器能够保存 string, int, float, double, bool, list, dicti ...
- ROS学习笔记11-写一个简单的服务和客户端(C++版本)
本文主要来源于:http://wiki.ros.org/ROS/Tutorials/WritingServiceClient%28c%2B%2B%29 写一个服务节点.在创建消息和服务中,我们创建了一 ...
- ROS学习(八)—— 理解ROS服务和参数
一.ROS 服务 服务(services)是节点之间通讯的另一种方式.服务允许节点发送请求(request) 并获得一个响应(response) 二.rosservice 1.用途 rosservic ...
- Ros学习——创建程序包
1.程序包 一个程序包要想称为catkin程序包必须符合以下要求: 该程序包必须包含catkin compliant package.xml文件 这个package.xml文件提供有关程序包的元信 ...
- ROS学习(七)—— 理解ROS Topic
一.准备工作 1.打开roscore roscore 2.turtlesim 打开一个turtulesim节点 rosrun turtlesim turtlesim_node 3.turtle key ...
- ROS学习(六)—— 理解ROS节点
一.准备工作 下载一个轻量级的模拟器 sudo apt-get install ros-kinetic-ros-tutorials 二.图概念的理解 1.Nodes:一个节点就是一个可执行文件,用来与 ...
随机推荐
- poj2114树分治
题意:给你一棵树,每条边有权值,求有没有一条链使得权值和为k 题解:和上一题类似,依旧是树分治,只是我们储存结果的时候是判断加起来为k的点对数,刚开始本来想用map存答案,结果就t了,后来用了vect ...
- hzau 1202 GCD(矩阵快速幂)
1202: GCD Time Limit: 1 Sec Memory Limit: 1280 MBSubmit: 201 Solved: 31[Submit][Status][Web Board] ...
- Ubuntu下使用tmux实现分屏,以及tmux快捷键
最近用到了终端的复用,使用了tmux,写一下自己的使用和一些快捷键. tmux是指通过一个终端登录远程主机并运行后,在其中可以开启多个控制台的终端复用软件. 来个效果图: 截图我使用的命令是 gno ...
- vue-cli项目中如何使用锚点
两种方式: 1.使用vue-router实现锚点功能(利用html5的history模式,vue-router的滚动行为) import Vue from 'vue' import VueRouter ...
- BitmapUtil(高效压缩不失真)
package com.changim.patient.app.utils; import android.app.Activity; import android.content.ContentRe ...
- LeetCode OJ:Flatten Binary Tree to Linked List(捋平二叉树)
Given a binary tree, flatten it to a linked list in-place. For example,Given 1 / \ 2 5 / \ \ 3 4 6 T ...
- 条款47:请使用traits class表示类型信息
在stl的算法中,我们的希望往往是根据不同的迭代器类型进行不同的更有效率的操作: template<typename IterT, typename DistT> void advance ...
- 《深入理解 C# 第2版》 - 书摘精要
(P13) 在很大程度上,C# 2 更像是对 C# 1 的各种不足之处的修修补补,所以并没有一鸣惊人.而 C# 3 中几乎所有特性都是为了构建 LINQ,并且其结果也十分特别: (P24) 为了让委托 ...
- C++中声明和定义的区别
声明 这有一个与这个名字相关的东西,并且它是这个类型的,告诉编译器我要使用它,并期待它定义在某一个地方. 定义 定义是指提供所有必要的信息(占用内存大小),使其能够创建整个实体. 我们必须明白的: 一 ...
- [Luogu3852][TJOI2007]小朋友
luogu 题意 求弦图的最大独立集. sol 按照完美消除序列一个个贪心选即可. code #include<cstdio> #include<algorithm> #inc ...