Ros学习——创建ROS消息和ROS服务
1.rosed
rosed 是 rosbash 的一部分。利用它可以直接通过package名来获取到待编辑的文件而无需指定该文件的存储路径了。
rosed默认的编辑器是vim。修改其他的,打开~/.bashrc 文件,增加:
export EDITOR='emacs -nw'
2.消息和服务
消息(msg): msg文件就是一个描述ROS中所使用消息类型的简单文本。它们会被用来生成不同语言的源代码。msg文件存放在package的msg目录下。
msg文件实际上就是每行声明一个数据类型和变量名。可以使用的数据类型如下:
int8, int16, int32, int64 (plus uint*)
float32, float64
string
time, duration
other msg files
variable-length array[] and fixed-length array[C]
服务(srv): 一个srv文件描述一项服务。它包含两个部分:请求和响应。srv文件则存放在srv目录下。
srv文件分为请求和响应两部分,由'---'分隔。
3.msg
- 1.在之前创建的package里定义新的消息
$ cd ~/catkin_ws/src/beginner_tutorials
$ mkdir msg
$ echo "int64 num" > msg/Num.msg
- 2.确保msg文件被转换成为C++,Python和其他语言的源代码
查看package.xml, 确保它包含一下两条语句:
<build_depend>message_generation</build_depend>
<run_depend>message_runtime</run_depend>
- 3.打开CMakeLists.txt文件,利用find_packag函数,增加对message_generation的依赖
# Do not just add this line to your CMakeLists.txt, modify the existing line
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation)
- 4.确保你设置了运行依赖:
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
- 5.修改add_message_files
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# ) 改为: add_message_files(
FILES
Num.msg
)
- 6.添加了如下代码:
generate_messages()
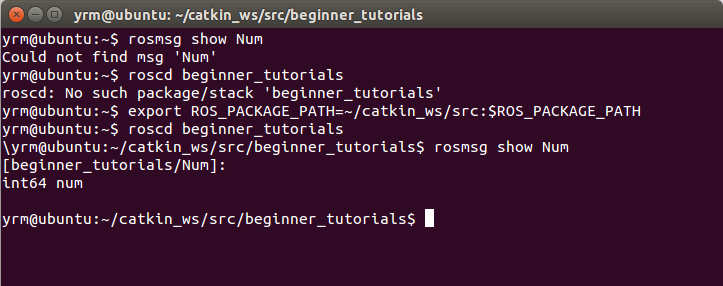
- 7.使用rosmsg
$ rosmsg show beginner_tutorials/Num #或者
$ rosmsg show Num
结果:
4.srv
- 1.创建一个服务
$ roscd beginner_tutorials
$ mkdir srv
- 2.新建/赋值一个服务文件
$ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
- 3.确保srv文件被转换成C++,Python和其他语言的源代码:CMakeLists.txt文件中增加了对message_generation的依赖
# Do not just add this line to your CMakeLists.txt, modify the existing line
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation)
- 4.修改add_message_files
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# ) #改为: add_service_files(
FILES
AddTwoInts.srv
)
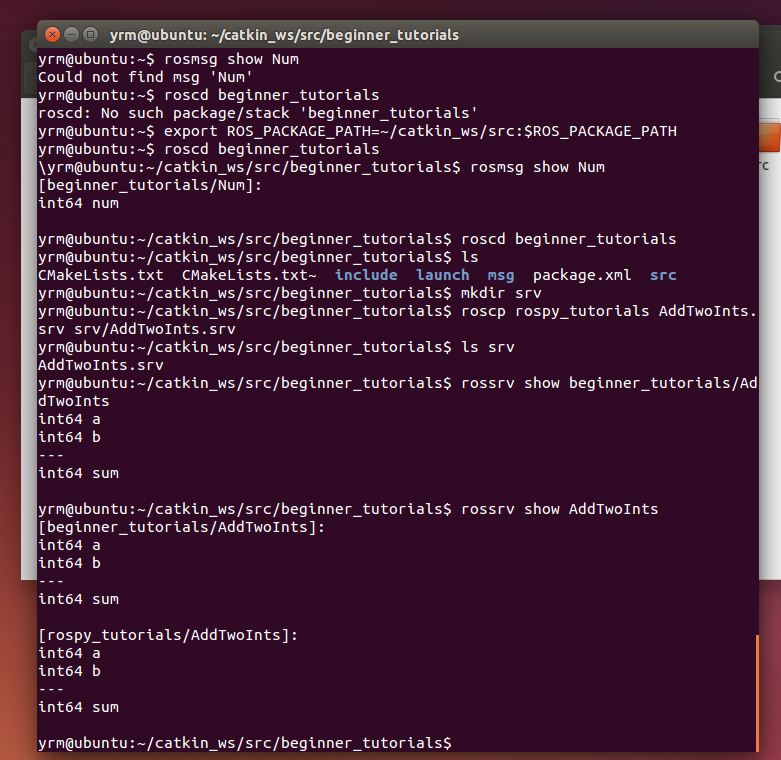
- 5.使用rossrv
$ rossrv show beginner_tutorials/AddTwoInts
#或者
$ rossrv show AddTwoInts
- 6.结果
Ros学习——创建ROS消息和ROS服务的更多相关文章
- ROS学习笔记三(理解ROS节点)
要求已经在Linux系统中安装一个学习用的ros软件包例子: sudo apt-get install ros-indigo-ros-tutorials ROS图形概念概述 nodes:节点,一个节点 ...
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- ROS学习(二)—— 配置ROS环境
一.管理环境 p { margin-bottom: 0.25cm; line-height: 120% } a:link { } 如果你在查找和使用ROS软件包方面遇到了问题,请确保你已经正确配置了脚 ...
- ROS学习笔记(一) # ROS参数服务器
参考 roscpp/Overview/Parameter Server 0. 概述 ROS参数服务器能够保存 string, int, float, double, bool, list, dicti ...
- ROS学习笔记11-写一个简单的服务和客户端(C++版本)
本文主要来源于:http://wiki.ros.org/ROS/Tutorials/WritingServiceClient%28c%2B%2B%29 写一个服务节点.在创建消息和服务中,我们创建了一 ...
- ROS学习(八)—— 理解ROS服务和参数
一.ROS 服务 服务(services)是节点之间通讯的另一种方式.服务允许节点发送请求(request) 并获得一个响应(response) 二.rosservice 1.用途 rosservic ...
- Ros学习——创建程序包
1.程序包 一个程序包要想称为catkin程序包必须符合以下要求: 该程序包必须包含catkin compliant package.xml文件 这个package.xml文件提供有关程序包的元信 ...
- ROS学习(七)—— 理解ROS Topic
一.准备工作 1.打开roscore roscore 2.turtlesim 打开一个turtulesim节点 rosrun turtlesim turtlesim_node 3.turtle key ...
- ROS学习(六)—— 理解ROS节点
一.准备工作 下载一个轻量级的模拟器 sudo apt-get install ros-kinetic-ros-tutorials 二.图概念的理解 1.Nodes:一个节点就是一个可执行文件,用来与 ...
随机推荐
- 手动下载 Xcode 文档
下载Xcode文档的方法有两个: 1. 自动下载:到在Xcode的Preserences中Downloads页面的Documentation,点击对应文档的下载. 2. 手动下载:到这个页面:http ...
- Mysql时间戳函数和ip转换函数
Mysql中对于unix时间戳的转换还是挺方便的, 1.转换为时间戳 select unix_timestamp('2013-07-15 10-06-07') 如果参数为空,则为当前时间 2.转换为时 ...
- LeetCode OJ:Contains Duplicate III(是否包含重复)
Given an array of integers, find out whether there are two distinct indices i and j in the array suc ...
- Redis 高可用及分片集群,说了你也不懂
Redis 简介 Memcached: 优点:高性能读写.单一数据类型.支持客户端式分布式集群.一致性hash 多核结构.多线程读写性能高. 缺点:无持久化.节点故障可能出现缓存穿透.分布式需要客户端 ...
- Python with 结构
一段基本的 with 表达式,其结构是这样的: with EXPR as VAR: BLOCK EXPR 可以是任意表达式: as VAR 是可选的.其一般的执行过程是这样的: 计算 EXPR ,并获 ...
- [推荐]InfoQ上的深入浅出Node.js的系列文章
InfoQ上的深入浅出Node.js的系列文章 详情如下链接:http://www.heiboard.com/?p=2081
- Python 函数之迭代器和生成器
1.迭代器 迭代器是访问集合元素的一种方式.迭代器对象从集合的第一个元素开始访问,直到所有的元素被访问完结束.迭代器只能往前不会后退,迭代器仅仅在迭代到某个元素时才计算该元素,而在这之前或之后,元素可 ...
- JSP/java 执行创建批处理文件,并执行批处理事务。
protected void doGet(HttpServletRequest req, HttpServletResponse resp) { InputStream in = null; Inpu ...
- 【转】S1 Setup
概念 S1是eNB和MME之间交换应用层配置数据的接口的名称.它是在建立TNL完成后的第一个S1AP的操作,S1的建立意味着eNB和MME之间之前已经存在的所有应用层数据将被全部清空,所有的数据将被重 ...
- DevExpress TreeList GridView 样式设置
1.GridView 样式设置 this.gridViewUser.PaintStyleName = "Flat"; 2.TreeList 样式设置 this.treeListDe ...