罗德里格斯旋转公式(Rodrigues' rotation formula)推导
本文综合了几个相关的维基百科,加了点自己的理解,从比较基础的向量投影和叉积讲起,推导出罗德里格斯旋转公式。公式比较繁杂,如有错误,欢迎评论区指出。
对于向量的三维旋转问题,给定旋转轴和旋转角度,用罗德里格斯(Rodrigues)旋转公式可以得出旋转后的向量。另外,罗德里格斯旋转公式可以用旋转矩阵表示,即将三维旋转的轴-角(axis-angle)表示转变为旋转矩阵表示。
向量投影(Vector projection)
向量a在非零向量b上的向量投影指的是a在平行于向量b的直线上的正交投影。结果是一个平行于b的向量,定义为\(\mathbf{a}_1=a_1\hat{\mathbf{b}}\),其中,\(a_1\)是一个标量,称为a在b上的标量投影,\(\hat{\mathbf{b}}\)是与b同向的单位向量。\(a_1=\left\Vert\mathbf{a}\right\Vert\cos\theta=\mathbf{a}\cdot \hat{\mathbf{b}}=\mathbf{a}\cdot\frac{\mathbf{b}}{\left\Vert\mathbf{b}\right\Vert}\),其中\(\cdot\)表示点积,\(\left\Vert\mathbf{a}\right\Vert\)表示a的长度,\(\theta\)表示a和b的夹角。标量投影有正负,正负号与夹角\(\theta\)有关。
有了向量投影\(\textbf{a}_1\),向量a可以表示为\(\mathbf{a}=\mathbf{a}_1+\mathbf{a}_2\),其中\(\mathbf{a}_2\)称为a from b的vector rejection(没找到比较官方的翻译),也即a向正交于b的超平面的正交投影,\(\mathbf{a}_2=\mathbf{a}-\mathbf{a}_1=\mathbf{a}-(\left\Vert\mathbf{a}\right\Vert\cos\theta)\hat{\mathbf{b}}\)。下图比较清晰地表示出\(\mathbf{a}\)、\(\mathbf{a}_1\)、\(\mathbf{a}_2\)的关系。
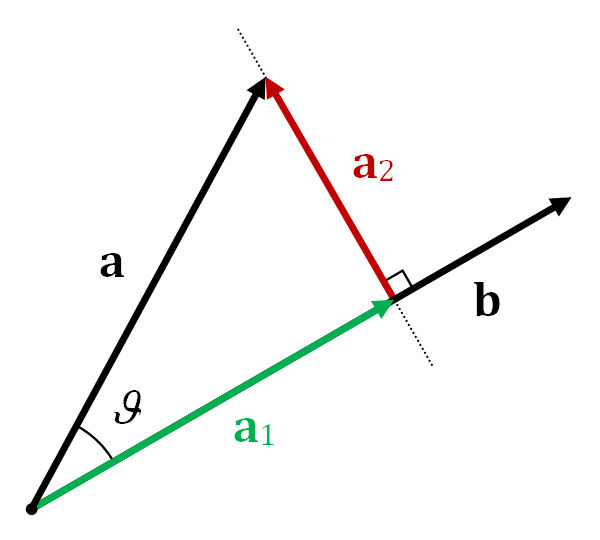
图1 Projection of a on b(a1), rejection of a from b(a2)
当\(90^{\circ}<\theta\le180^{\circ}\)时,向量投影示意图如图2所示:
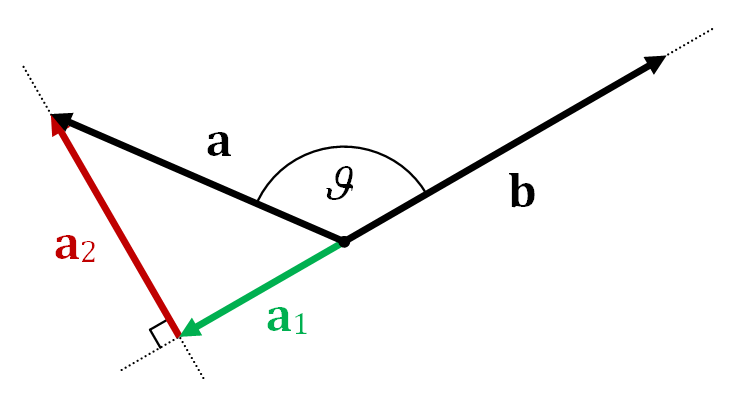
图2 大于90°时的向量投影示意图,此时a1与b的方向相反
记号
向量a在b上的向量投影用加粗的\(\mathbf{a}_1\)表示,标量投影用不加粗的\(a_1\)。有时向量投影和vector rejection分别用\(\mathbf{a}_{\parallel\mathbf{b}}\)和\(\mathbf{a}_{\perp\mathbf{b}}\)表示。
用a和b表示
当\(\theta\)未知时,可通过a和b计算得出,\(\cos\theta = \frac{\mathbf{a}\cdot\mathbf{b}}{\left\Vert\mathbf{a}\right\Vert\left\Vert\mathbf{b}\right\Vert}\),从而标量投影、向量投影和vector rejection可以分别表示如下:
- 标量投影:
\begin{equation}
a_1=\left\Vert\mathbf{a}\right\Vert\cos\theta=\left\Vert\mathbf{a}\right\Vert\frac{\mathbf{a}\cdot\mathbf{b}}{\left\Vert\mathbf{a}\right\Vert\left\Vert\mathbf{b}\right\Vert}=\frac{\mathbf{a}\cdot\mathbf{b}}{\left\Vert\mathbf{b}\right\Vert}
\end{equation} - 向量投影:
\begin{equation}
\mathbf{a}_1=a_1\hat{\mathbf{b}}=\frac{\mathbf{a}\cdot\mathbf{b}}{\left\Vert\mathbf{b}\right\Vert}\frac{\mathbf{b}}{\left\Vert\mathbf{b}\right\Vert}=\left(\mathbf{a}\cdot\hat{\mathbf{b}}\right)\hat{\mathbf{b}}=\frac{\mathbf{a}\cdot\mathbf{b}}{\mathbf{b}\cdot\mathbf{b}}\mathbf{b}
\end{equation} - vector rejection:
\begin{equation}
\mathbf{a}_2=\mathbf{a}-\mathbf{a}_1=\mathbf{a}-\frac{\mathbf{a}\cdot\mathbf{b}}{\mathbf{b}\cdot\mathbf{b}}\mathbf{b}
\end{equation}
叉积
定义
叉积(又称向量积)是三维空间(\(\mathbb{R}^3\))向量的二元操作,用符号\(\times\)表示,给定两个线性独立的向量a和b,叉积\(\mathbf{a}\times\mathbf{b}\)的结果是一个向量,这个向量与a、b都正交,也就是正交于a、b所在的平面。为什么要强调线性独立呢,因为非线性独立的两个向量(同向或反向)的叉积为\(\mathbf{0}\)。
叉积定义为:
\begin{equation}
\mathbf{a}\times\mathbf{b}=\left\Vert\mathbf{a}\right\Vert\left\Vert\mathbf{b}\right\Vert\sin(\theta)\mathbf{n}
\end{equation}
其中,\(\theta\)表示a、b的夹角,\(0^\circ\le\theta\le180^\circ\),\(\mathbf{n}\)正交于a、b所在的平面,方向通常由右手法则确定,如下图所示:
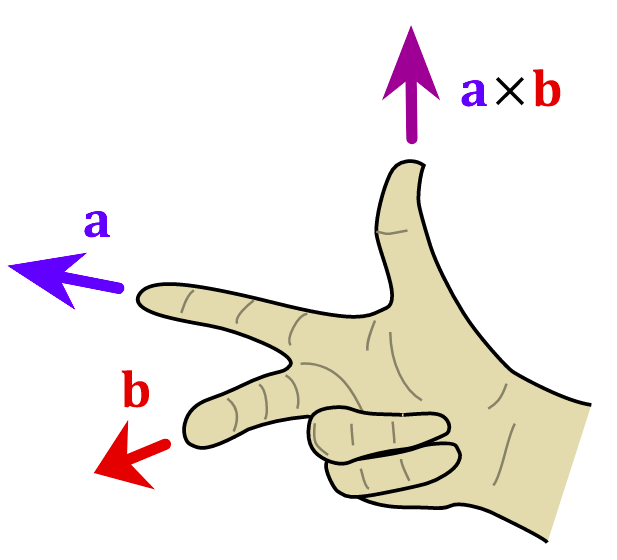
图3 通过右手法则确定叉积方向
性质
右手法则决定了叉积不符合交换律,而符合反交换律,即\(\mathbf{a}\times\mathbf{b}=-\mathbf{b}\times\mathbf{a}\),如图4所示:
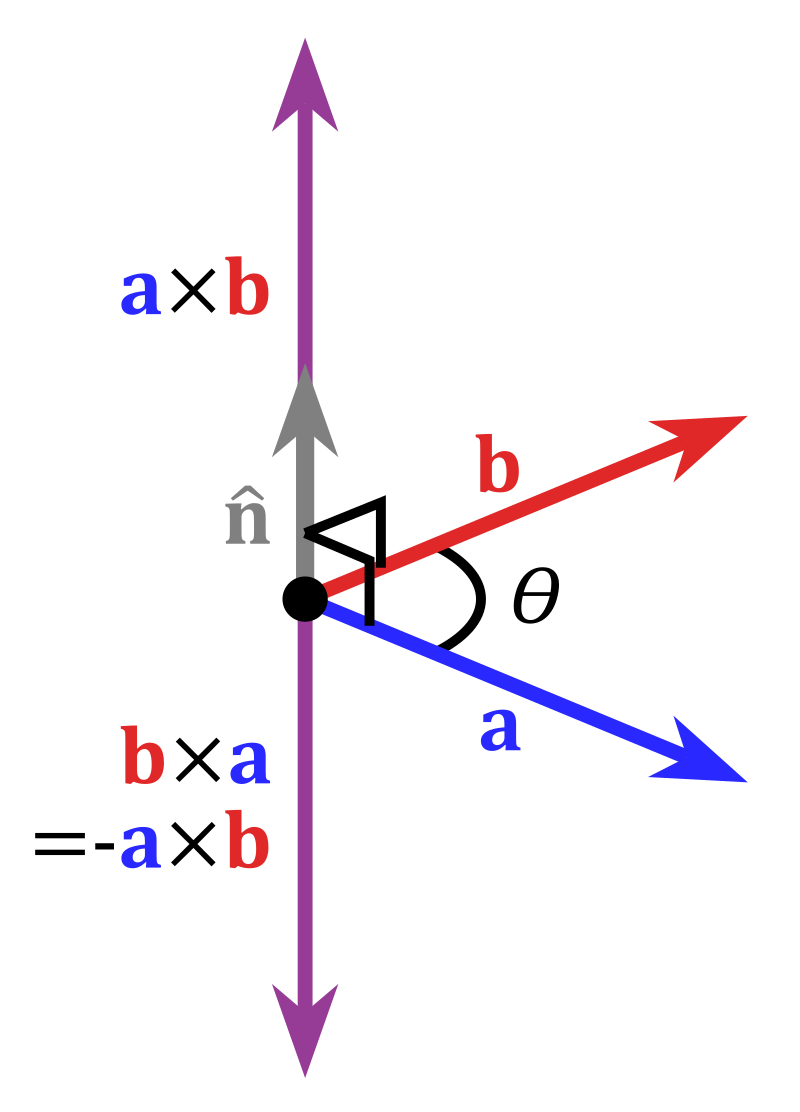
图4 反交换律
由公式也可以看出当a、b的不线性独立时,即夹角为\(0^\circ\)或\(180^\circ\)时,叉积为零向量\(\mathbf{0}\)。叉积随夹角\(\theta\)的变化如图5所示。
图5 叉积随夹角变化示意图
另外,叉积符合分配律,即\(\mathbf{a}\times(\mathbf{b}+\mathbf{c})=\mathbf{a}\times\mathbf{b}+\mathbf{a}\times\mathbf{c}\)。如图6所示,左图向量b和c都被分解为vector projection和vector rejection两部分,右图则解释了分配律成立的原因,看图时要注意图中的平行四边形和正方形都表示了相等的关系。
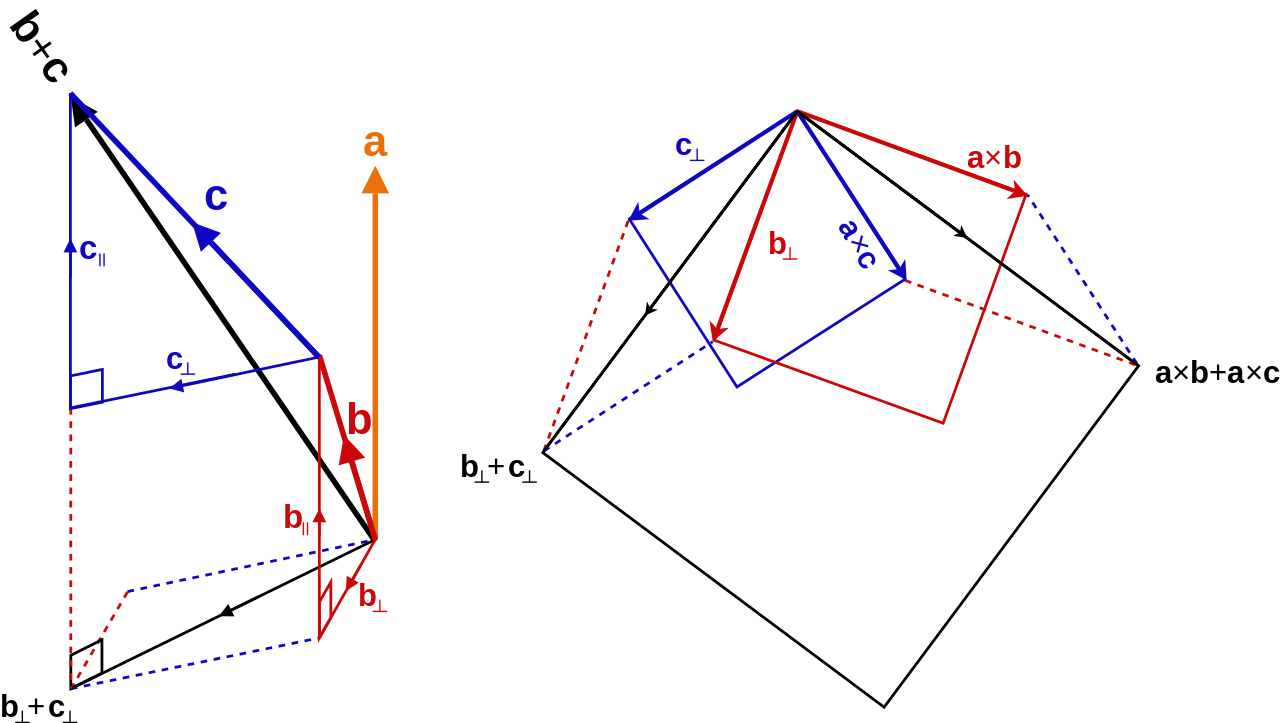
图6 叉积分配律示意图
坐标表示
考虑右手法则定义的标准三维坐标系,三个坐标轴\(\mathbf{i}\)、\(\mathbf{j}\)、\(\mathbf{{k}}\)如图7所示,并满足以下等式关系:
\[
\mathbf{i}\times\mathbf{j}=\mathbf{k}\\
\mathbf{j}\times\mathbf{k}=\mathbf{i}\\
\mathbf{k}\times\mathbf{i}=\mathbf{j}
\]
同样,由叉积的反交换律可得下面三个等式关系:
\[
\mathbf{j}\times\mathbf{i}=-\mathbf{k}\\
\mathbf{k}\times\mathbf{j}=-\mathbf{i}\\
\mathbf{i}\times\mathbf{k}=-\mathbf{j}
\]
由平行向量的叉积为零向量可得:\(\mathbf{i}\times\mathbf{i}=\mathbf{j}\times\mathbf{j}=\mathbf{k}\times\mathbf{k}=\mathbf{0}\)。
由图7也可得,任意一个三维向量都可以表示为三个基向量的线性组合,例如:
\[
\mathbf{a}=a_1\mathbf{i}+a_2\mathbf{j}+a_3\mathbf{k}\\
\mathbf{b}=b_1\mathbf{i}+b_2\mathbf{j}+b_2\mathbf{k}
\]
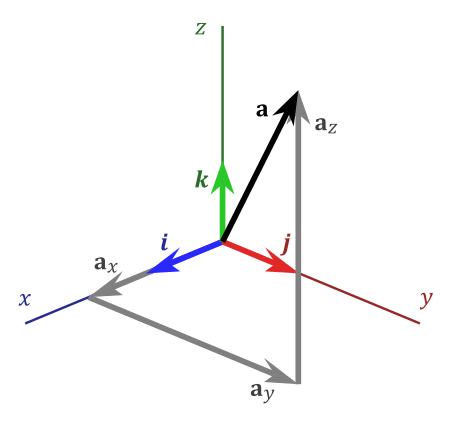
图7 三维坐标系基向量与向量a的表示
进而,可以用坐标表示叉积运算如下:
\begin{equation}
\begin{split}
\mathbf{a}\times\mathbf{b}&=(a_1\mathbf{i}+a_2\mathbf{j}+a_3\mathbf{k})\times(b_1\mathbf{i}+b_2\mathbf{j}+b_2\mathbf{k})\\
&=(a_2b_3-a_3b_2)\mathbf{i}+(a_3b_1-a_1b_3)\mathbf{j}+(a_1b_2-a_2b_1)\mathbf{k}\\
&=\left|\begin{array}{cccc}
i & j & k \\
a_1 & a_2 & a_3\\
b_1 & b_2 & b_3
\end{array}\right|
\end{split}
\end{equation}
上式中,将括号展开分别进行叉积推导出第二个等号,而第三个等号则可通过行列式计算得出。
进一步,可将叉积表示为矩阵与向量相乘的形式,由于\(\mathbf{a}\times\mathbf{b}=(a_2b_3-a_3b_2, a_3b_1-a_1b_3,a_1b_2-a_2b_1)\),则叉积可表示为:
\begin{equation}
\begin{split}
\mathbf{a}\times\mathbf{b}=\left[\mathbf{a}\right]_\times\mathbf{b}=\left[\begin{array}{cccc}
0 & -a_3 & a_2\\
a_3 & 0 & -a_1\\
-a_2 & a_1 & 0
\end{array}
\right]\left[
\begin{array}{cc}
b_1\\b_2\\b_3
\end{array}\right]=\left[\mathbf{b}\right]^T_\times\mathbf{a}=\left[\begin{array}{cccc}
0 & b_3 & -b_2\\
-b_3 & 0 & b_1\\
b_2 & -b_1 & 0
\end{array}
\right]\left[
\begin{array}{cc}
a_1\\a_2\\a_3
\end{array}\right]
\end{split}
\end{equation}
其中,\(\left[\mathbf{a}\right]_\times\)(slam14讲书上记为\(\mathbf{a}^\wedge\))表示由向量\(\mathbf{a}\)得到的反对称矩阵,定义为:
\begin{equation}
\begin{split}
\left[\mathbf{a}\right]_\times=\left[\begin{array}{cccc}
0 & -a_3 & a_2\\
a_3 & 0 & -a_1\\
-a_2 & a_1 & 0
\end{array}
\right]
\end{split}
\end{equation}
通过该反对称矩阵的定义可以将叉积表示为矩阵与向量的乘法。
罗德里格斯旋转公式
考虑\(\mathbf{v}\in\mathbb{R}^3\)的三维旋转问题,旋转轴\(\mathbf{k}\)是单位向量,旋转角为\(\theta\),按照右手法则(即逆时针)旋转。则可通过罗德里格斯旋转公式得出旋转后的向量\(\mathbf{v}_{rot}\)为:
\begin{equation}
\mathbf{v}_{rot}=\cos\theta\mathbf{v}+(1-\cos\theta)(\mathbf{k}\cdot\mathbf{v})\mathbf{k}+\sin\theta\mathbf{k}\times\mathbf{v}
\end{equation}
推导过程
由上文中向量投影部分的知识我们知道,一个向量\(\mathbf{v}\)可以分解为平行于\(\mathbf{k}\)的分量\(\mathbf{v}_\parallel\)和正交于\(\mathbf{k}\)的分量\(\mathbf{v}_{\perp}\):
\begin{equation}
\mathbf{v}=\mathbf{v}_{\parallel}+\mathbf{v}_\perp
\end{equation}
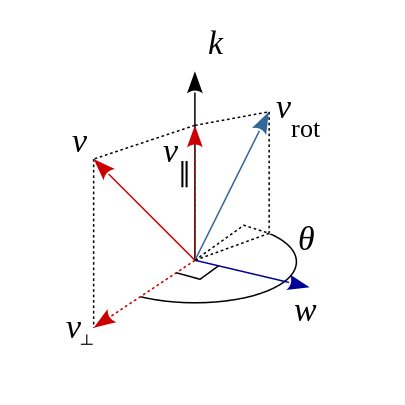
图8 向量的分解图示
如图8所示,因为\(\mathbf{k}\)为单位向量,由向量投影部分知识可得
\begin{equation}
\mathbf{v}_\parallel=(\mathbf{v}\cdot\mathbf{k})\mathbf{k}
\end{equation}
\begin{equation}
\mathbf{v}_\perp=\mathbf{v}-\mathbf{v}_\parallel=\mathbf{v}-(\mathbf{k}\cdot\mathbf{v})\mathbf{k}=-\mathbf{k}\times(\mathbf{k}\times\mathbf{v})
\end{equation}
关于上式最后一个等号的推导如下:
回顾叉积的知识,\(\mathbf{k}\times\mathbf{v}=\mathbf{k}\times(\mathbf{v}_{\parallel}+\mathbf{v}_\perp)=\mathbf{0}+\mathbf{k}\times\mathbf{v}_\perp=\mathbf{k}\times\mathbf{v}_\perp\),\(\mathbf{k}\times\mathbf{v}\)可以看做将\(\mathbf{v}_\perp\)以\(\mathbf{k}\)为旋转轴逆时针旋转了\(90^\circ\)。正如图9所示,\(\mathbf{v}\)分解为\(\mathbf{v}_\parallel\)和\(\mathbf{v}_\perp\),用右手法则不难确定出\(\mathbf{k}\times\mathbf{v}\)的方向,进而不难发现,\(\mathbf{k}\times(\mathbf{k}\times\mathbf{v})\)可以看做将\(\mathbf{v}_\perp\)以\(\mathbf{k}\)为旋转轴逆时针旋转了\(180^\circ\),图9中的(椭)圆正反映了\(\mathbf{k}\times(\mathbf{k}\times\mathbf{v})\)、\(\mathbf{k}\times\mathbf{v}\)、\(\mathbf{v}_\perp\)三者“大小相等”的关系。最终,可知\(\mathbf{v}_\perp=-\mathbf{k}\times(\mathbf{k}\times\mathbf{v})\)。
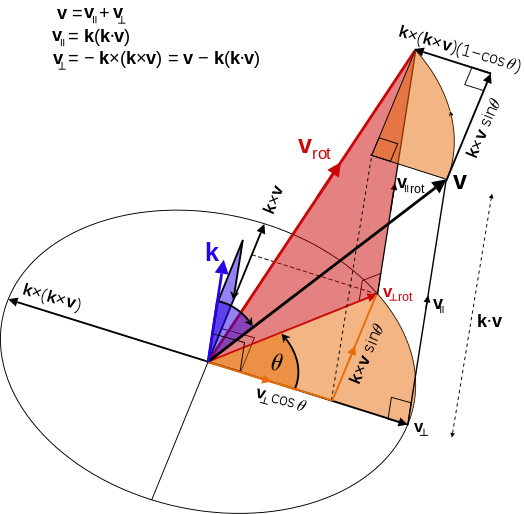
图9 罗德里格斯旋转公式几何图示
从图8还可以看出,v的平行分量\(\mathbf{v}_\parallel\)不会因为旋转而改变,旋转后的向量\(\mathbf{v}_{rot}\)的平行分量依然等于\(\mathbf{v}_\parallel\),即\(\mathbf{v}_{\parallel rot}=\mathbf{v}_\parallel\)。
而v的正交分量\(\mathbf{v}_\perp\)在旋转过程中大小不变,方向会发生变化,即
\begin{equation}
\begin{split}
&|\mathbf{v}_{\perp rot}|=|\mathbf{v}_\perp|\\
&\mathbf{v}_{\perp rot}=\cos\theta\mathbf{v}_\perp+\sin\theta\mathbf{k}\times\mathbf{v}_\perp=\cos\theta\mathbf{v}_\perp+\sin\theta\mathbf{k}\times\mathbf{v}
\end{split}
\end{equation}
上述第2个等式通过图9可以得出,将圆看做\(xOy\)坐标系平面,\(\mathbf{v}_\perp\)所在的直线看做\(x\)轴,\(\mathbf{k}\times\mathbf{v}\)所在的直线看做\(y\)轴,结合三角函数,很容易用\(\mathbf{v}_\perp\)和\(\mathbf{k}\times\mathbf{v}\)表示出\(\mathbf{v}_\perp\)。
到这已经得出罗德里格斯公式了:
\begin{equation}
\begin{split}
\mathbf{v}_{rot}&=\mathbf{v}_{\parallel rot}+\mathbf{v}_{\perp rot}\\
&=\mathbf{v}_\parallel+\cos\theta\mathbf{v}_\perp+\sin\theta\mathbf{k}\times\mathbf{v}\\
&=\mathbf{v}_\parallel+\cos\theta(\mathbf{v}-\mathbf{v}_\parallel)+\sin\theta\mathbf{k}\times\mathbf{v}\\
&=\cos\theta\mathbf{v}+(1-\cos\theta)\mathbf{v}_\parallel+\sin\theta\mathbf{k}\times\mathbf{v}\\
&=\cos\theta\mathbf{v}+(1-\cos\theta)(\mathbf{k}\cdot\mathbf{v})\mathbf{k}+\sin\theta\mathbf{k}\times\mathbf{v}
\end{split}
\end{equation}
矩阵形式
在叉积部分提到过叉积可以表示为矩阵乘向量的形式,类似地,罗德里格斯旋转公式可以表示为旋转矩阵乘以向量的形式,\(\mathbf{v}_{rot}=\mathbf{R}\mathbf{v}\),其中\(\mathbf{R}\)是旋转矩阵。在slam14讲\(^{[4]}\)中的表示如下:
\begin{equation}
\mathbf{R}=\cos\theta\mathbf{I}+(1-\cos\theta)\mathbf{k}\mathbf{k}^T+\sin\theta\mathbf{k}^\wedge
\end{equation}
其中,\(\mathbf{I}\)表示单位矩阵,\(\mathbf{k}\)表示旋转向量(书中用\(\mathbf{n}\)表示旋转向量),\(\mathbf{k}^\wedge\)表示由\(\mathbf{k}\)得到的反对称矩阵。从式(13)不难看出上式,另外,结合式(13)还可以得到下面这个式子:
\begin{equation}
\begin{split}
\mathbf{v}_{rot}&=\mathbf{v}_{\parallel rot}+\mathbf{v}_{\perp rot}\\
&=\mathbf{v}_\parallel+\cos\theta\mathbf{v}_\perp+\sin\theta\mathbf{k}\times\mathbf{v}\\
&=\mathbf{v}-\mathbf{v}_\perp+\cos\theta\mathbf{v}_\perp+\sin\theta\mathbf{k}\times\mathbf{v}\\
&=\mathbf{v}+(\sin\theta)\mathbf{k}\times\mathbf{v}+(1-\cos\theta)\mathbf{k}\times\mathbf{k}\times\mathbf{v}
\end{split}
\end{equation}
从而,得出这个维基百科上的矩阵表示:
\begin{equation}
\begin{split}
\mathbf{v}_{rot}=\mathbf{R}\mathbf{v}=\mathbf{v}+(\sin\theta)\mathbf{K}\mathbf{v}+(1-\cos\theta)\mathbf{K}^2\mathbf{v}
\end{split}
\end{equation}
其中,\(\mathbf{R}=\mathbf{I}+(\sin\theta)\mathbf{K}+(1-\cos\theta)\mathbf{K}^2\),\(\mathbf{K}\)表示由旋转向量\(\mathbf{k}\)生成的反对称矩阵。
参考:
[1] Rodrigues' rotation formula
[2] Cross product
[3] Vector projection
[4] 视觉SLAM十四讲:从理论到实践
罗德里格斯旋转公式(Rodrigues' rotation formula)推导的更多相关文章
- c++ 知道旋转前后矩阵向量值 求旋转矩阵c++/c#代码 知道两个向量求他们的旋转矩阵
原文作者:aircraft 原文链接:https://www.cnblogs.com/DOMLX/p/12115244.html 知道旋转前后矩阵向量值 如何去求旋转矩阵R 的c++/c#代码??? ...
- 【多视图几何】TUM 课程 第2章 刚体运动
课程的 YouTube 地址为:https://www.youtube.com/playlist?list=PLTBdjV_4f-EJn6udZ34tht9EVIW7lbeo4 .视频评论区可以找到课 ...
- 回顾Games101图形学(一)几何变换中一些公式的推导
回顾Games101 chatper1 - 6 前言 本文只写回顾后重新加深认识的知识 透视除法的意义 经过MVP矩阵之后,将模型空间下某点的坐标,转换成了裁剪空间下的坐标,此时因为裁剪空间的范围是x ...
- 【Notes_3】现代图形学入门——基础变换、MVP变换模型
基础变换(二维) 三维变化与二维变换矩阵类似 齐次坐标下的基础变换 Scale: \[S(s_x,s_y) =\begin{pmatrix} s_x &0 &0\\ 0 & s ...
- 【Notes】现代图形学入门_01
跟着闫令琪老师的课程学习,总结自己学习到的知识点 课程网址GAMES101 B站课程地址GAMES101 课程资料百度网盘[提取码:0000] 计算机图形学概述 计算机图形学是一门将模型转化到屏幕上图 ...
- UR机械臂运动学正逆解方法
最近几个月因为工作接触到了机械臂的项目,突然对机械臂运动方法产生了兴趣,也就是如何控制机械臂的位置和姿态.借用一张网上的图片,应该是ur5的尺寸.我用到的是ur3机械臂,除了尺寸不一样,各关节结构和初 ...
- 【视觉SLAM14讲】ch3课后题答案
1.验证旋转矩阵是正交矩阵 感觉下面这篇博客写的不错 http://www.cnblogs.com/caster99/p/4703033.html 总结一下:旋转矩阵是一个完美的矩阵——正交矩阵.①行 ...
- CS184.1X 计算机图形学导论(第三讲)
第一单元(介绍关于变换的数学知识) :基本二维变换 模型坐标系,世界坐标系 1.缩放 Scale(规模,比例) Sx表示在x方向上放大的倍数,Sy表示在y方向上放大的倍数,因此X坐标乘以Sx,Y坐标乘 ...
- 旋转矩阵(Rotation Matrix)的推导及其应用
向量的平移,比较简单. 缩放也较为简单 矩阵如何进行计算呢?之前的文章中有简介一种方法,把行旋转一下,然后与右侧对应相乘.在谷歌图片搜索旋转矩阵时,看到这张动图,觉得表述的很清晰了. 稍微复杂一点的是 ...
随机推荐
- GDAl C++ 创建Shp
用于GDAL,C++开发环境测试. #include <iostream> #include "gdal_priv.h" #include "ogrsf_fr ...
- JVM之JVM的体系结构
一.JDK的组成 JDK:JDK是Java开发工具包,是Sun Microsystems针对Java开发员的产品.JDK中包含JRE(在JDK的安装目录下有一个名为jre的目录,里面有两个文件夹bin ...
- mongodb学习(一)——简介和基本操作
简介 MongoDB 是一个基于分布式文件存储的数据库 属于NoSQL数据库,是介于关系数据库和非关系数据库之间的产品,是非关系数据库当中功能最丰富,最像关系数据库的 旨在为WEB应用提供可扩展的高性 ...
- springboot2 整合redis
1.添加依赖 <dependency> <groupId>org.springframework.boot</groupId> <artifactId> ...
- 关于yarn安装,这里做一个备份
安装的是window版本,官网上有三种安装方式. 第一种下载一个.msi的安装包,然后当它运行时会指引你将 Yarn 安装到 Windows 上,因为点开以后页面是404,所以没有用这种方法. 第二种 ...
- 基于 HTML5 WebGL + WebVR 的 3D 虚实现实可视化系统
前言 2019 年 VR, AR, XR, 5G, 工业互联网等名词频繁出现在我们的视野中,信息的分享与虚实的结合已经成为大势所趋,5G 是新一代信息通信技术升级的重要方向,工业互联网是制造业转型升级 ...
- window10配置python虚拟环境的路径
当我们搭建python+django项目的时候,需要配置虚拟环境,从而使项目与项目之间的包相互隔离,互不影响. 1.配置虚拟环境前,首先需要安装两个包 pip install virtualenvwr ...
- Docker学习(十)Docker容器编排 Docker-compose
Docker学习(十)Docker容器编排 Docker-compose 标签(空格分隔): docker 容器编排是什么 应用一般由单独容器化的组件组成,须按照一定顺序在网络级别进行组织,以使其能够 ...
- 保存数据到txt
join用的不错 a = "Hello, world" b = "你好,世界" c = "How are you?" with open(f ...
- ubuntu 16.10 shu rufa meiy ou l e geng xi zhi hou