Area(Pick定理POJ1256)
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 5429 | Accepted: 2436 |
Description
robots patrolling the area. These robots move along the walls of the facility and report suspicious observations to the central security office. The only flaw in the system a competitor抯 agent could find is the fact that the robots radio their movements unencrypted.
Not being able to find out more, the agent wants to use that information to calculate the exact size of the area occupied by the new facility. It is public knowledge that all the corners of the building are situated on a rectangular grid and that only straight
walls are used. Figure 1 shows the course of a robot around an example area.
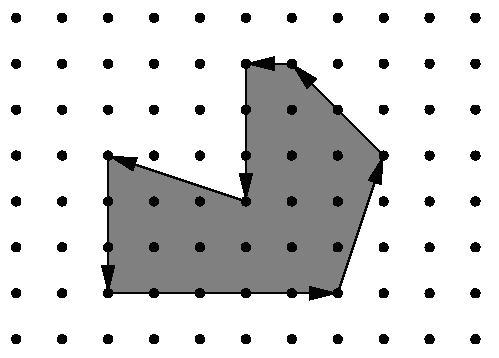
Figure 1: Example area.
You are hired to write a program that calculates the area occupied by the new facility from the movements of a robot along its walls. You can assume that this area is a polygon with corners on a rectangular grid. However, your boss insists that you use a formula
he is so proud to have found somewhere. The formula relates the number I of grid points inside the polygon, the number E of grid points on the edges, and the total area A of the polygon. Unfortunately, you have lost the sheet on which he had written down that
simple formula for you, so your first task is to find the formula yourself.
Input
For each scenario, you are given the number m, 3 <= m < 100, of movements of the robot in the first line. The following m lines contain pairs 揹x dy�of integers, separated by a single blank, satisfying .-100 <= dx, dy <= 100 and (dx, dy) != (0, 0). Such a pair
means that the robot moves on to a grid point dx units to the right and dy units upwards on the grid (with respect to the current position). You can assume that the curve along which the robot moves is closed and that it does not intersect or even touch itself
except for the start and end points. The robot moves anti-clockwise around the building, so the area to be calculated lies to the left of the curve. It is known in advance that the whole polygon would fit into a square on the grid with a side length of 100
units.
Output
Separate the three numbers by two single blanks. Terminate the output for the scenario with a blank line.
Sample Input
2
4
1 0
0 1
-1 0
0 -1
7
5 0
1 3
-2 2
-1 0
0 -3
-3 1
0 -3
Sample Output
Scenario #1:
0 4 1.0 Scenario #2:
12 16 19.0
Source
#include <set>
#include <map>
#include <list>
#include <stack>
#include <cmath>
#include <vector>
#include <queue>
#include <string>
#include <cstdio>
#include <cstdlib>
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
typedef long long LL;
const double eps = 1e-5;
int n,m;
struct node
{
int x;
int y;
}Point[110]; int GCD(int a,int b)//计算边缘上的点,不计起点(将两个点转化为向量,<strong>a</strong>=n<strong>b,</strong>每个向量都可由从起点起,第一个到达格点的点形成的向量组成,(想想为什么),n就是这个向量的x,y的GCD)
{
return b==0?a:GCD(b,a%b);
} int area(node a,node b)//叉积计算面积
{
return a.x*b.y-a.y*b.x;
}
int main()
{
int T;
int m;
int w=1;
scanf("%d",&T);
while(T--)
{
scanf("%d",&m);
int num=0;
int ant=0;
double ans=0;
for(int i=0;i<m;i++)
{
scanf("%d %d",&Point[i].x,&Point[i].y);
if(i)
{
Point[i].x+=Point[i-1].x;
Point[i].y+=Point[i-1].y;
num+=GCD(abs(Point[i].x-Point[i-1].x),abs(Point[i].y-Point[i-1].y));
ans+=area(Point[i-1],Point[i]);
}
}
num+=GCD(abs(Point[n-1].x-Point[0].x),abs(Point[n-1].y-Point[0].y));
ans+=area(Point[m-1],Point[0]);
if(ans<0)
{
ans=-ans;
}
ant=(int)(ans/2-(double)num/2+1);//pick定理
printf("Scenario #%d:\n",w++);
printf("%d %d %.1f\n\n",ant,num,ans/2);
}
return 0;
}
Area(Pick定理POJ1256)的更多相关文章
- poj 1265 Area (Pick定理+求面积)
链接:http://poj.org/problem?id=1265 Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: ...
- POJ1265——Area(Pick定理+多边形面积)
Area DescriptionBeing well known for its highly innovative products, Merck would definitely be a goo ...
- poj 1265 Area(pick定理)
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 4373 Accepted: 1983 Description Bein ...
- POJ 1265 Area (Pick定理 & 多边形面积)
题目链接:POJ 1265 Problem Description Being well known for its highly innovative products, Merck would d ...
- [poj 1265]Area[Pick定理][三角剖分]
题意: 给出机器人移动的向量, 计算包围区域的内部整点, 边上整点, 面积. 思路: 面积是用三角剖分, 边上整点与GCD有关, 内部整点套用Pick定理. S = I + E / 2 - 1 I 为 ...
- Area(pick定理)
http://poj.org/problem?id=1265 题意:起始为(0,0),给出每个点的偏移量,求依次连接这些点形成的多边形边界上格点的个数. 思路:先将各个点的坐标求出存入,由pick定理 ...
- poj 1265 Area( pick 定理 )
题目:http://poj.org/problem?id=1265 题意:已知机器人行走步数及每一步的坐标 变化量 ,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:1.以 ...
- poj 1265 Area(Pick定理)
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5666 Accepted: 2533 Description ...
- POJ 1265 Area POJ 2954 Triangle Pick定理
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5227 Accepted: 2342 Description ...
随机推荐
- PAT 解题报告 1010. Radix (25)
1010. Radix (25) Given a pair of positive integers, for example, 6 and 110, can this equation 6 = 11 ...
- PostgreSQL wiki
https://wiki.postgresql.org/wiki/Main_Page https://wiki.postgresql.org/wiki/Converting_from_other_Da ...
- 树链剖分(单点更新,求区间最值,区间求和Bzoj1036)
1036: [ZJOI2008]树的统计Count Time Limit: 10 Sec Memory Limit: 162 MB Submit: 5759 Solved: 2383 [Submi ...
- 圆的反演变换(HDU4773)
题意:给出两个相离的圆O1,O2和圆外一点P,求构造这样的圆:同时与两个圆相外切,且经过点P,输出圆的圆心和半径 分析:画图很容易看出这样的圆要么存在一个,要么存在两个:此题直接解方程是不容易的,先看 ...
- Android -- 自定义View(一)
1,引言:刚从国庆长假的放荡中醒过来,已经有将近十天没碰电脑了,上午写写代码感觉手还是挺生的,想把自定义view好好的系统的学学,在网上看了看别人出的教程 ,stay4it的自定义view感觉还是挺好 ...
- RMAN命令
一.启动.关闭数据库 在RMAN中执行关闭和启动数据库的命令与SQL环境下一模一样.当然,在执行之前,你需要先连接到目标数据库,如例: C:\Documents and Settings\Admini ...
- 5. 星际争霸之php设计模式--抽象工厂模式
题记==============================================================================本php设计模式专辑来源于博客(jymo ...
- access调用联系
using System; using System.Configuration; using System.Data; using System.Linq; using System.Web; us ...
- [php] 处理图像
<?php /* 处理图像 */ /* {php5} 动态图像的处理更容易. 在 php.ini中就包含了GD扩展包, 去掉 其中的注释即可. extension=php_gd2.dll 其中 ...
- 【rails3教材】博客构建过程2
2. 使用脚手架快速搭建网页 rails的脚手架可以快速生成应用程序的一些片段,如果你需要为一个资源创建一系列的控制器视图模型,那么脚手架就是你需要的工具 3. 创建资源 对于一个博客程序,你可以以生 ...