3dContactPointAnnotationTool开发日志(十七)
今天又改进了一下算法,把生成出来的接触点按中心坐标拍了个序,再把中心坐标一样的坐标点合并,x,y,z每个维度都只保留大的值。然后来看看效果:
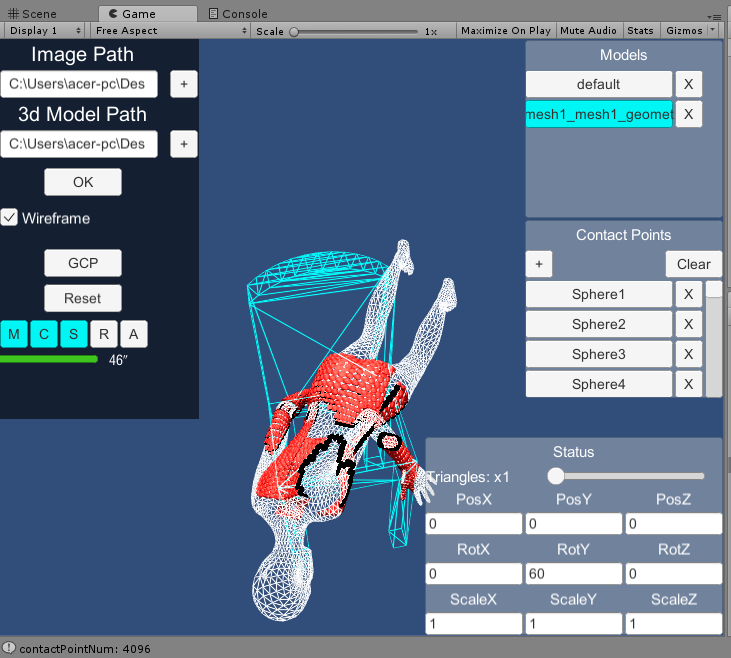
先是1倍的,只剩下4096个接触点了,2^12个,少了1w多个接触点,耗时也只需要46秒。
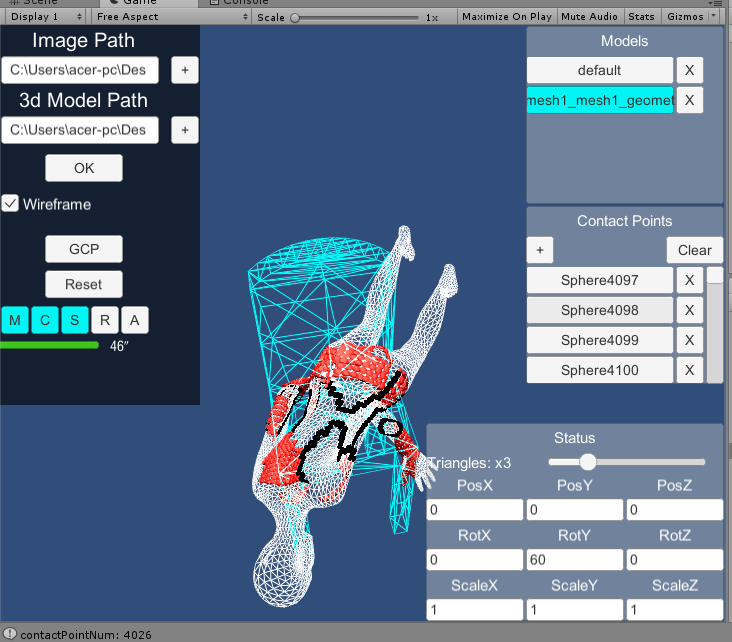
然后是3倍的,4026个接触点,耗时46秒。
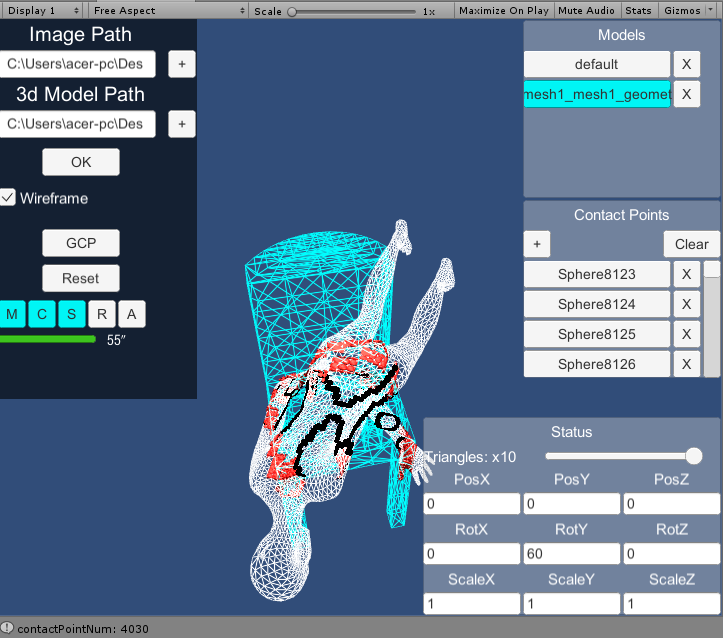
最后是10倍的,4030个接触点,耗时55秒。
3dContactPointAnnotationTool开发日志(十七)的更多相关文章
- 3dContactPointAnnotationTool开发日志(三四)
今天就是让背景图可以变大变小,变透明度,然后将3d的点投影到图片上,输出2d接触点信息: 可以看到输出了正确的接触点信息: 然后还把空物体的包围盒大小设置为边长为0.1的的正方体,点击选中 ...
- 3dContactPointAnnotationTool开发日志(三三)
添加背景图片后发现Runtime Transform Gizmo无法选中物体了: 于是改了一下EditorObjectSelection.cs中的WereAnyUIElementsHovere ...
- 3dContactPointAnnotationTool开发日志(三二)
今天就是看怎么把论文的python源码预测出来的smpl模型的姿势和形状参数弄到unity版本的smpl里,但是python版本的和unity版本的不一样. 先看看他的fit_3d.py: ...
- 3dContactPointAnnotationTool开发日志(三一)
在玩的时候遇到了一个python的问题: Traceback (most recent call last): File ".\convert.py", line 13, in ...
- 3dContactPointAnnotationTool开发日志(三十)
在vs2017里生成opencv时遇到了无法打开python27_d.lib的问题,具体解决请看这个,不过我用的是方法2,python37_d.lib找不到同理. Windows下可以用的op ...
- 3dContactPointAnnotationTool开发日志(二九)
今天想着在Windows平台上跑通那个代码,不过它的官网上写的支持平台不包括windows,但我还是想试试,因为看他的依赖好像和平台的关系不是特别大. 看了下它的py代码,不知道是py2还是p ...
- 3dContactPointAnnotationTool开发日志(二八)
师姐说物体间不能有穿透,于是我试了下给物体加rigidbody和meshCollider 然后就报错: 说是用meshCollider要么去掉刚体要么就把刚体设置为iskinematic. ...
- 3dContactPointAnnotationTool开发日志(二七)
今天的主要工作是把选中物体以及复制删除物体和右边三个面板联系起来,就是通过鼠标框选住物体,右边面板的对应项的颜色也会改变,而且通过右边面板也能控制物体的选中状态,被选中的物体成cyan青色,并且包 ...
- 3dContactPointAnnotationTool开发日志(二六)
之前给老师看了看我的毕设,老师觉得操作太复杂了,要能像3ds max里那样可以拖动物体的轴进行平移,沿着显示的圆圈旋转以及缩放啥的.说白了就是在Unity3d的Game视图显示出Scene视图里的 ...
随机推荐
- python remove跟pop的区别
remove根据值来删除 li=[1,2,3,4] li.pop[0] li.remove['] 或者是a=li[-1]li.remove(a) pop是根据索引来删除
- GeekOS: 一、构建基于Ubuntu9.04的实验环境
参考:http://www.cnblogs.com/wuchang/archive/2009/05/05/1450311.html 补充:在最后步骤中,执行bochs即可弹出运行窗口
- CodeChef BIBOARD: Binary Board 命题报告
这道题当时有了一点模糊的想法之后,构思了一整天-- 题意: 有一\(N \times M\)网格,每一格可以是白色或黑色.令\(B_i\)表示\(i \times i\)的纯黑子网格数量(子网格是指原 ...
- python是一门解释性语言吗?
其实这只能算说对了一半,准确来说是编译跟解释性语言.python跟java.C# 一样都是会预编译一部分代码(简称做了优化) 都知道java编译要先在cmd里敲 javac hello.world 是 ...
- c++动态库封装及调用(2、windows下动态库创建)
DLL即动态链接库(Dynamic-Link Libaray)的缩写,相当于Linux下的共享对象.Windows系统中大量采用了DLL机制,甚至内核的结构很大程度依赖与DLL机制.Windows下的 ...
- 北京Uber优步司机奖励政策(3月4日)
滴快车单单2.5倍,注册地址:http://www.udache.com/ 如何注册Uber司机(全国版最新最详细注册流程)/月入2万/不用抢单:http://www.cnblogs.com/mfry ...
- 成都Uber优步司机奖励政策(2月27日)
滴快车单单2.5倍,注册地址:http://www.udache.com/ 如何注册Uber司机(全国版最新最详细注册流程)/月入2万/不用抢单:http://www.cnblogs.com/mfry ...
- linq中group by 的用法
如下代码: var dates=(from p in points group p by p.LevelId into g select new { g.Key,g });之后 你会拿到这个数组: 之 ...
- beego 点滴
在使用beego时遇到 need a primary key field 1 确保结构中的 字段首字母大写 2 beego默认主键是id 如果主键定义的是其他字段比如userid 那么加上orm pk ...
- 『Python Kivy』Kivy模板语言KV说明
语言概念 KV语言允许你以声明的方式创建控件树,以及绑定控件属性到其他的控件或使用一种自然的方式进行回调. 它允许非常快速并灵活的改变你的UI. 它还可以让你的应用程序与应用程序的界面进行分隔. 如何 ...