UE 5 NavMesh 烘培 逻辑流程
- 在向场景重拖入一个NavMeshBoundsVolume时(或者修改时). 会调用

- 在增加NavMeshBoundsVolume后的调用堆栈如下. 可以看到最后是把请求放到了PendingDirtyTiles里了. 走异步烘培
- 异步烘培的驱动堆栈如下, 可以看到是从World的Tick到ProcessTileTasksAsyncAndGetUpdatedTiles函数里. 这个函数里取出来PendingDirtyTiles里记录的异步请求. 执行
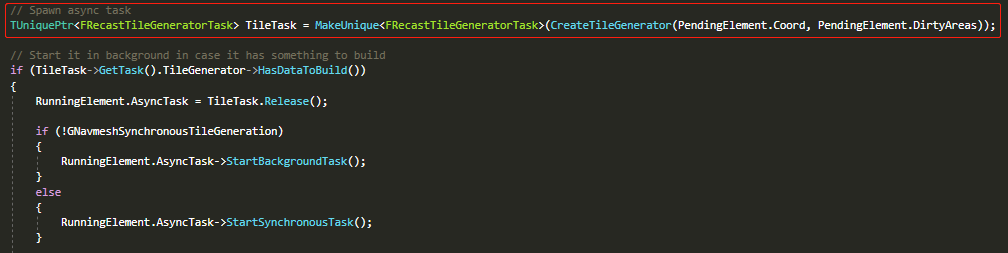
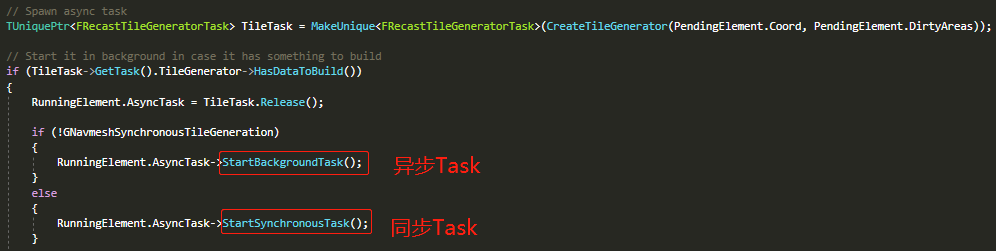
- 在ProcessTileTasksAsyncAndGetUpdatedTiles函数里创建了一个TileTask(调用CreateTileGenerator函数构造一个Generator初始化了Task)










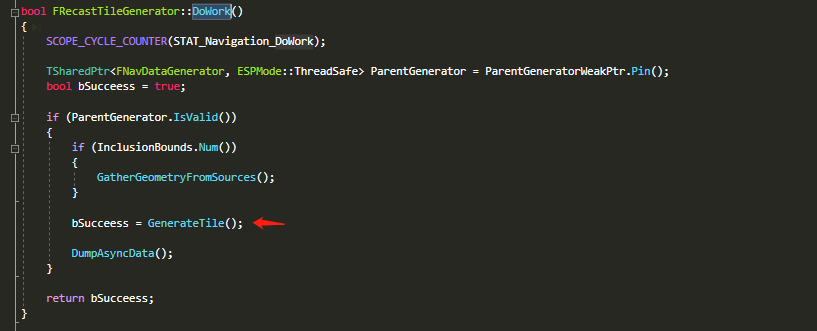
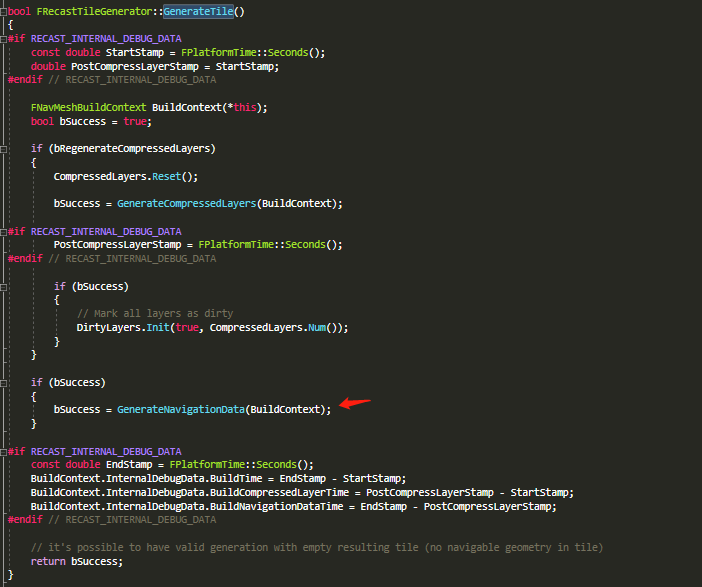
- UE的NavMesh烘培代码入口在 bool FRecastTileGenerator::GenerateTile()
- 主要烘培代码:
- 烘培完成后数据存储:
- 逻辑流程参考Recast是走的Sample_TempObstacles流程, 烘培区域选择的算法是RC_REGION_WATERSHED
2024.4.3 补充
----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
RebuildAll 逻辑流程.
- 在NavigationSystemV1 Build函数里调用NavData的RebuildAll, 实际会转发调用到FRecastNavMeshGenerator::RebuildAll()
- z在Generator的RebuildAll里先根据Bounds 标记所有的DirtyArea: MarkNavBoundsDirty()
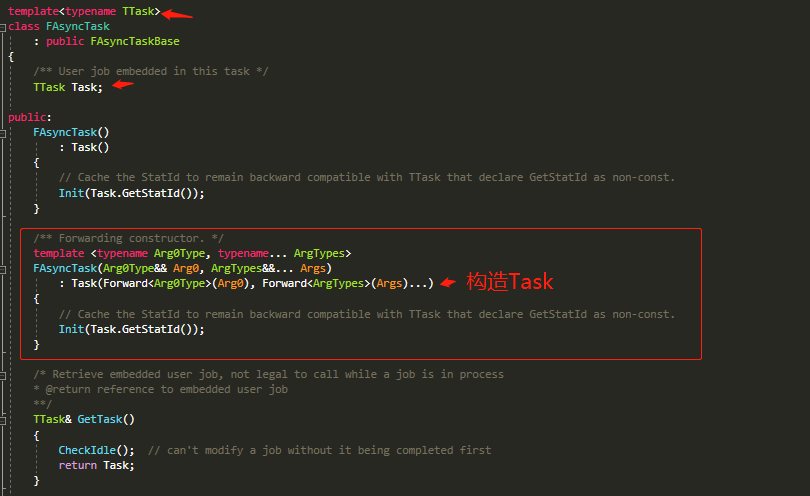
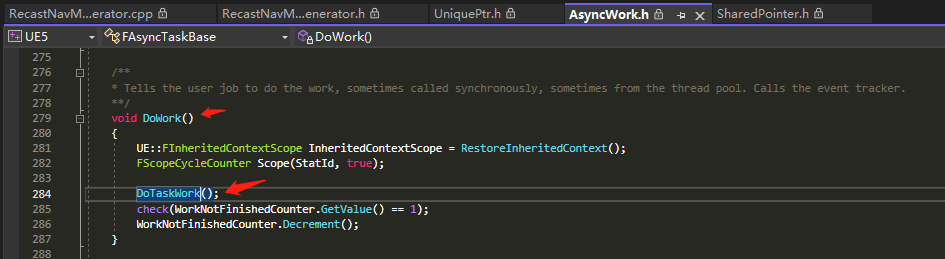
- 然后通过EnsureBuildCompletion函数(图1, 图3)确保收集每次要处理的Tile任务和确保这些Tile任务执行EnsureCompletion, 完成Build (图3)
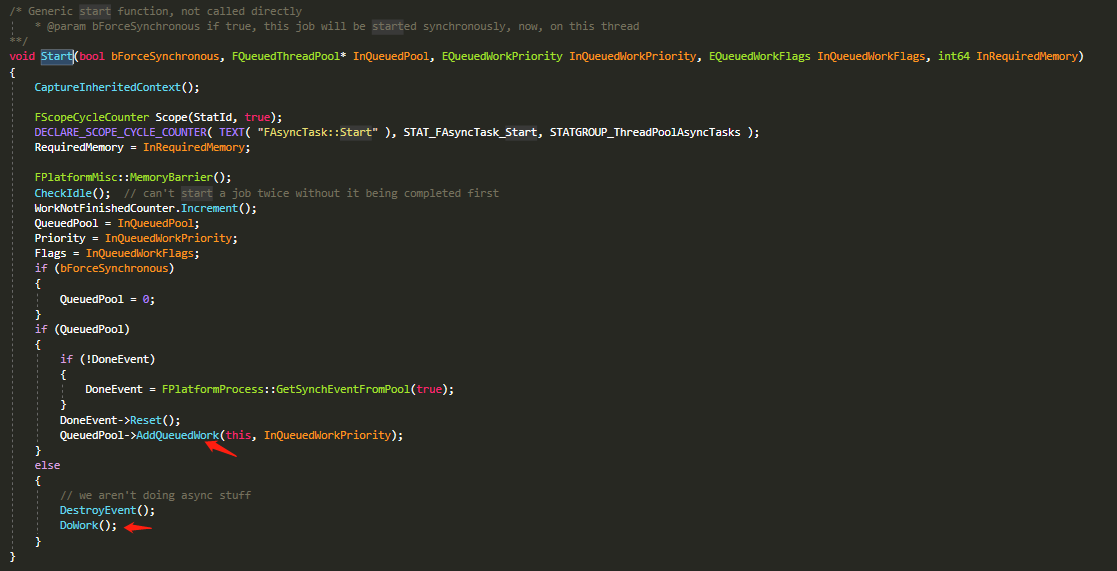
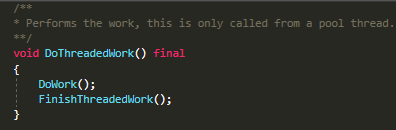
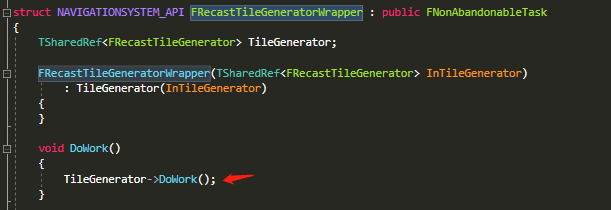
- 然后在Task的EnsureCompletion里, 调用的就是Task的DoWork, Task可以参考前面的分析.




过一遍后续的烘培流程 (以Tile为单位, 整个NavMesh是由n*m个tile组成. 多线程烘培. 同时最多进行MaxTileGeneratorTasks个Tile烘培任务):
从这里开始 bool FRecastTileGenerator::DoWork() → bool FRecastTileGenerator::GenerateTile()
具体:
- 先调用GenerateCompressedLayers 生成CompressedLayers, 这里有完整的烘培流程的前半部分
- 构造高度场 CreateHeightField
- 栅格化并标记NavModify. ComputeRasterizationMasks
- 栅格化网格, RasterizeTriangles → RasterizeGeometry / RasterizeGeometryRecast → rcRasterizeTriangles
- 过滤一些无效的span. ApplyVoxelFilter + GenerateRecastFilter → rcFilterLowHangingWalkableObstacles + rcFilterLedgeSpans + rcFilterWalkableLowHeightSpans
- 构造Compact高度场 BuildCompactHeightField
- Erode 一下寻路Span. RecastErodeWalkable → rcErodeWalkableAndLowAreas + rcErodeWalkableArea
- 重头戏, 烘培nav Layer: RecastBuildLayers → RC_REGION_WATERSHED → rcBuildDistanceField + rcBuildHeightfieldLayers → rcGatherRegionsNoFilter
- 构造dtBuildTileCacheLayer, 压缩Layer: RecastBuildTileCache
- 在得到CompressedLayers之后, 我们只是完成了NavMesh烘培的前半部分, 即完成BuildRegion阶段. 后续还需要做区域优化, 形成轮廓, 简化轮廓, 构建PolyMesh, 生成DetailPolyMesh
- 上面提到的步骤,紧接着GenerateCompressedLayers之后调用GenerateNavigationData实现.
- GenerateNavigationData()
- GenerateNavigationDataLayer
- 解压缩 dtDecompressTileCacheLayer
- Rasterize obstacles 处理动态阻挡. MarkDynamicAreas(*GenerationContext.Layer);
- 重新烘培区域, 类似上面的步骤g: dtBuildTileCacheDistanceField + dtBuildTileCacheRegions → filterSmallRegions
- 构建轮廓 dtBuildTileCacheContours
- 构建PolyMesh, dtBuildTileCachePolyMesh
- 构建PolyMeshDetail, dtBuildTileCachePolyMeshDetail
- 处理offmeshLinks
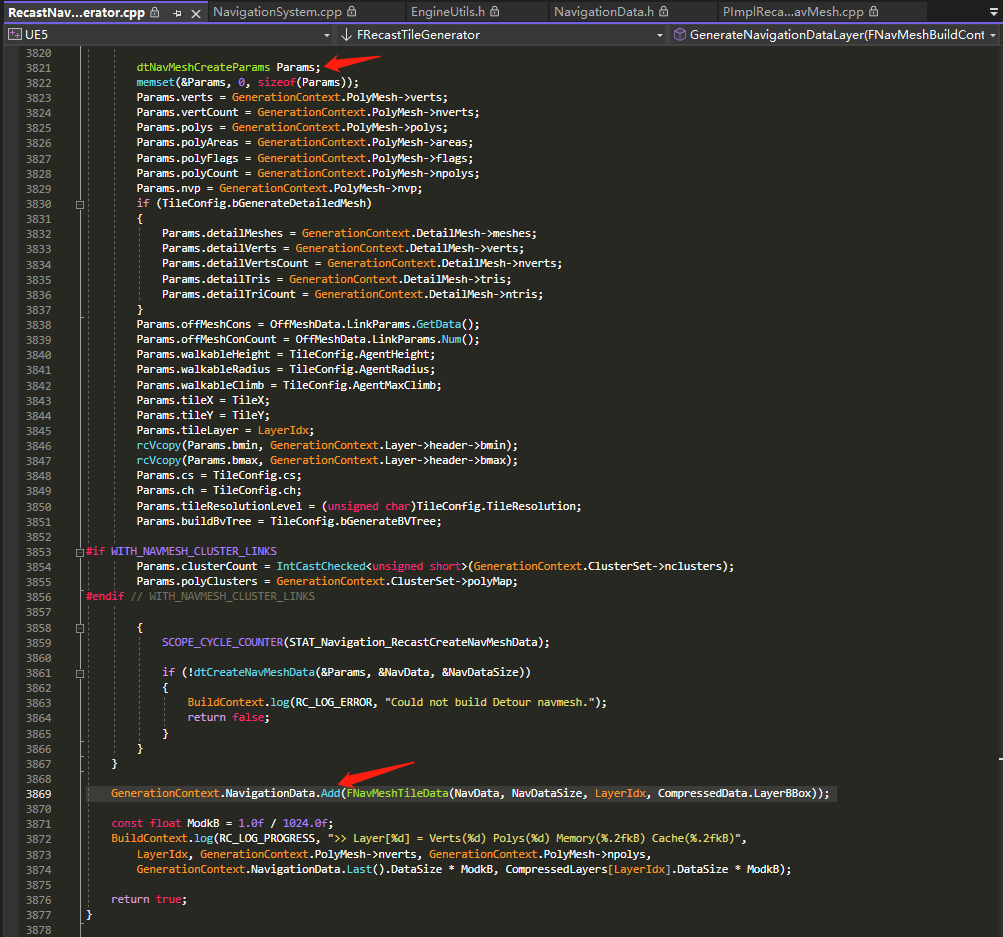
- 最后完成NavMeshData的构建: dtCreateNavMeshData(&Params, &NavData, &NavDataSize))
- 构建UE的NavMesh对象FNavMeshTileData: GenerationContext.NavigationData.Add(FNavMeshTileData(NavData, NavDataSize, LayerIdx, CompressedData.LayerBBox));
从上面可以看出来, Recast的Sample_TempObstacles和Sample_TileMesh关键的区别就在于. TempObstacles会先把烘培的前半部分数据Compress一下, 会有CompressedLayers
这部分数据是场景Mesh得到的原始数据,再加上动态阻挡的部分之后. 再重新烘培区域, 简化区域, 烘培细节网格. 得到最终的NavMesh.
这样做的原因不难理解: 场景不变的数据, 先烘培好压缩保存起来, 如果这里出现了动态阻挡, 则把场景不变的数据解压出来, 叠加动态阻挡, 再重新烘培一下区域. 形成更新的Navmesh.
所以这就是Sample_TempObstacles烘培的是支持动态阻挡的Dynamic NavMesh和Sample_TileMesh烘培的不支持动态阻挡的Static NavMesh 之间的区别. UE亦是如此.
UE 5 NavMesh 烘培 逻辑流程的更多相关文章
- 在Salesforce中通过 Debug Log 方式 跟踪逻辑流程
在Salesforce中通过 Debug Log方式 跟踪逻辑流程 具体位置如下所示: Setup ---> Logs ---> Debug Logs ---> Monitored ...
- Unity3D研究院之动态修改烘培贴图的大小&脚本烘培场景
Unity默认烘培场景以后每张烘培贴图的大小是1024.但是有可能你的场景比较简单,用1024会比较浪费.如下图所示,这是我的一个场景的烘培贴图,右上角一大部分完全是没有用到,但是它却占着空间. 有 ...
- 【翻译】CEDEC2012 SQUARE ENIX GPGPU实现高速GI烘培工具的方法
虽然实时GI技术已经趋于成熟了,但出于对不同平台的性能和质量的考虑, 更倾向搭配一些预计算的渲染技术来实现,如给静态物体提供GI的LightMap, 给动态物体提供GI的Irradiance Vol ...
- Unity3D 5.1烘培 操作
http://blog.csdn.net/asd237241291/article/details/48056575 原创文章如需转载请注明:转载自 脱莫柔Unity3D学习之旅 Unity3D引擎技 ...
- HDFS追本溯源:HDFS操作的逻辑流程与源码解析
本文主要介绍5个典型的HDFS流程,这些流程充分体现了HDFS实体间IPC接口和stream接口之间的配合. 1. Client和NN Client到NN有大量的元数据操作,比如修改文件名,在给定目录 ...
- 3DMAX 烘培技术
烘培是指,把光照信息渲染成贴图,而后把这个烘培后的贴图再贴回到场景中去的技术.烘培技术把光照计算的结果提前写入到了贴图中,因此在实时渲染中不需要进行耗时的光照计算,大大提高了实时渲染的效率. 烘培和渲 ...
- Unity3d 烘培lightingmap 注意的2点.
1.在Qulity里面设置合适的灯光数量.否则,你会发现烘培出来的场景,有些灯光没有起作用. 2.在导入模型时候,注意勾选:Generate Lightingmap . 否则,模型没办法烘培. 3. ...
- Laravel5 快速认证逻辑流程分析
Laravel5本身自带一套用户认证功能,只需在新项目下,使用命令行php artisan make:auth 和 php artisan migrate就可以使用自带的快速认证功能. 以下为分析登录 ...
- 【一起学源码-微服务】Hystrix 源码二:Hystrix核心流程:Hystix非降级逻辑流程梳理
说明 原创不易,如若转载 请标明来源! 欢迎关注本人微信公众号:壹枝花算不算浪漫 更多内容也可查看本人博客:一枝花算不算浪漫 前言 前情回顾 上一讲我们讲了配置了feign.hystrix.enabl ...
- Nginx(二): worker 进程处理逻辑-流程框架
Nginx 启动起来之后,会有几个进程运行:1. master 进程接收用户命令并做出响应; 2. worker 进程负责处理各网络事件,并同时接收来自master的处理协调命令: master 主要 ...
随机推荐
- [GPT] Vue 的 methods 中使用了 addEventListener,如何在 addEventListener 的匿名函数参数中访问 Vue data 变量
在 Vue 的 methods 方法中使用 addEventListener时,你可以使用 箭头函数 来访问 Vue 实例的数据. 箭头函数不会创建自己的作用域,而是继承父级作用域的上下文.以下是 ...
- [FAQ] web3js, Error: [number-to-bn] while converting number 0.1 to BN.js instance, error: invalid number value
我们在调用合约方法时,都可以传一些参数的,比如转账金额 value. value 的单位是 wei,这是一个很小的单位,所以一般数值很大. 如果误把 ether 当成 wei 传参,就会报标题中的错误 ...
- 好玩的vue组件
https://gitee.com/zheng_yongtao/jyeontu-component-warehouse 推荐这个大佬,很厉害悬浮按钮 评论组件 词云 瀑布流照片容器 视频动态封面 3D ...
- PaliGemma 正式发布 — Google 最新发布的前沿开放视觉语言模型
PaliGemma 是 Google 推出的新一代视觉语言模型家族,能够接收图像与文本输入并生成文本输出. Google 团队已推出三种类型的模型:预训练(PT)模型.混合模型和微调(FT)模型,这些 ...
- Vue.js条件渲染与列表渲染指南
title: Vue.js条件渲染与列表渲染指南 date: 2024/5/26 20:11:49 updated: 2024/5/26 20:11:49 categories: 前端开发 tags: ...
- CSS——引入方式
1.行内式 <div style="color: white;background-color: #369;text-align: center">行内设置</d ...
- redis 使用lua脚本 一次性获取多个hash key 字段值
客户端命令行代码: eval "local rst={};local field='schoolid'; for i,v in pairs(KEYS) do rst[i]=redis.cal ...
- RDP 端口转发 多窗口运行
需要设置本机的默认端口进行修改 优点:(1)部署简单.Windows自带,支持IPv4和IPv6(2)不用重启机器,还长记性.命令即时生效,重启系统后配置仍然存在.缺点:(1)不支持UDP(2)XP/ ...
- .net core 转 excel datatable list<t> 互转 xlsx
using System; using System.Collections; using System.Collections.Generic; using System.ComponentMode ...
- 2024盘古石取证比赛(IPA+人工智能)
前言 题目列表 IPA部分 1. 分析毛雪柳的手机检材,记账 APP 存储记账信息的数据库文件名称是: [ 答案格式:tmp.db ,区分大小写 ][ ★★★★☆ ] 通过icost软件可以定位rae ...