ROS-OPENCV
前言:opencv是一个开源的跨平台计算机视觉库。
前提:1.已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
2.安装了usb摄像头驱动,如还未安装,可参考:https://www.cnblogs.com/chendeqiang/p/10217099.html
一、安装opencv
sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv
二、在ROS中使用opencv
cv_bridge是一种图片格式转换的中间商,可以将ros中的图像格式转化为opencv中的格式。
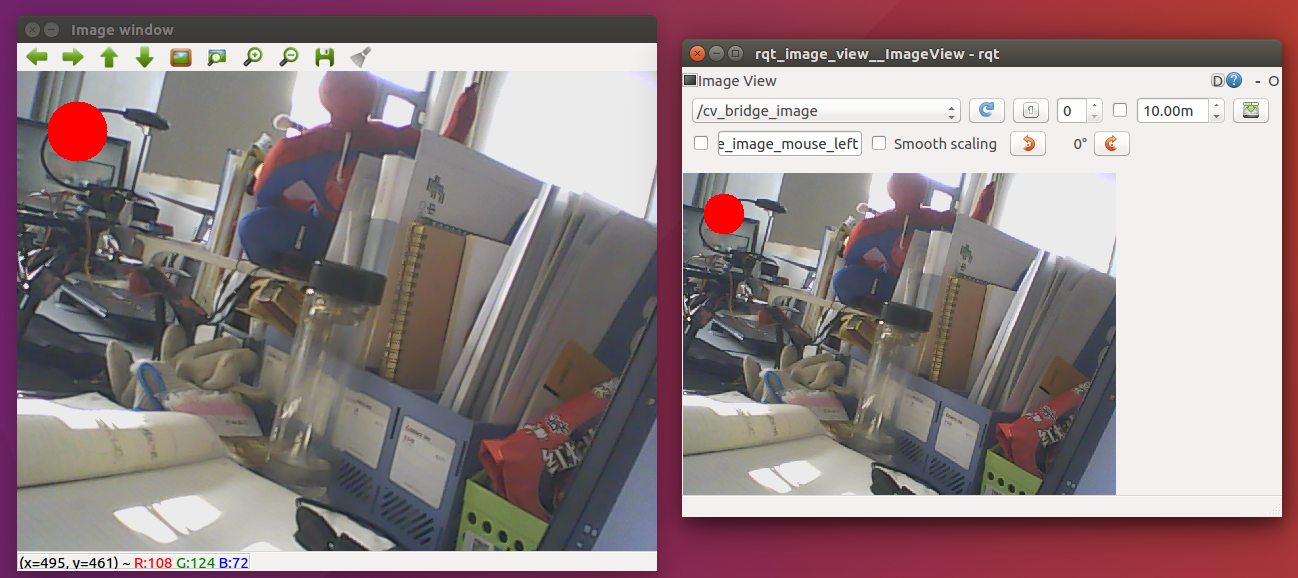
演示内容:从摄像头获取图像,转化成opencv格式显示,再转化成ros图像格式显示。
2.1 单独编译<<ROS机器人开发实践>> /robot_perception/robot_vision功能包
2.2 启动例程
roslaunch robot_vision usb_cam.launch rosrun robot_vision cv_bridge_test.py rqt_image_view
--------------------------------
效果如下:
-END-
ROS-OPENCV的更多相关文章
- OpenCV入门学习笔记
OpenCV入门学习笔记 参照OpenCV中文论坛相关文档(http://www.opencv.org.cn/) 一.简介 OpenCV(Open Source Computer Vision),开源 ...
- 颜色追踪块CamShift---33
原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/ 颜色追踪块CamShift滤波器. 首先确保你的kinect驱动或者uvc相机驱动能正常启动:(如果你使 ...
- Ubuntu配置ORB-SLAM2过程中的问题
https://www.imooc.com/article/details/id/29136 1. 提示“CMAKE_CXX_COMPILER-NOTFOUND ” 具体形式: Check for w ...
- Jetson tk1 刷机后要做的几件事
参考简书文章: http://www.jianshu.com/p/997ede860d74 1. 查看Jetson TK1 L4T版本 head -n 1 /etc/nv_tegra_release ...
- slam学习
学习内容: 数学: 线性代数,概率论, 优化理论,离散数学, 李代数, 凸优化: 算法: 概率机器人, 机器人状态估计, 深度学习,非线性优化: 工程: c/c++ , python, ros, ...
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 深度图从ros数据类型转换成opencv数据类型
摘要:ros下,利用realsense D435采集深度图,并将其转换成opencv的数据类型. 一. RGBD图像采集 通过image_transport包,根据给定的采集速度从realsense ...
- 关于ros将opencv版本固定“写死”的一些想法
今天主要工作是将ros和zed结合起来,但是发现自己安装了opencv3.1,ros indigo安装的是opencv2.4.8,这就麻烦了,zed支持的是opencv3.1.一开始使用slam2时, ...
- 在ROS中使用OpenCV
1.在工作空间下创建程序包 $ cd ~/catkin_ws/src$ catkin_create_pkg robot_vision roscpp std_msgs cv_bridge image_t ...
随机推荐
- IE浏览器 ajax传参数值为中文时出现乱码的解决方案
找了很多方法,发现就这个方法简单.直接.方便,直接推荐哦! 在汉字的位置加个保护措施:encodeURIComponent(parentid) 举个栗子>>> $.ajax({ ...
- RN打包的那些坑儿
Write By lz: Lz 寄语: RN虐我千百遍, 我待RN如初恋, 坑儿爬多了也就自然了 官方文档: http://reactnative.cn/docs/0.43/signed-apk-an ...
- 搭建 Lepus 天兔 监控MySQL
Part1: Lepus安装需要Lamp环境,lepus官网手册也建议采用XAMPP的方式安装,lepus也是在XAMPP上进行研发的 注意xampp会把apache,mysql,php都安装,所以要 ...
- IE兼容opacity
filter:alpha(opacity=80); opacity: 0.57; /* Firefox, Safari(WebKit), Opera) filter: "alpha(opac ...
- 一系列令人敬畏的.NET核心库,工具,框架和软件
内容 一般 框架,库和工具 API 应用框架 应用模板 身份验证和授权 Blockchain 博特 构建自动化 捆绑和缩小 高速缓存 CMS 代码分析和指标 压缩 编译器,管道工和语言 加密 数据库 ...
- 前端开发app
1.如果是 Angular 那就选 Ionic (一对好 CP) 2.如果是 Vue 那就选 Vux (基于 WeUI)3.如果是 jQuery 那就选 Framework7 (iOS 和 Andro ...
- Drop it FreeCodeCamp
function drop(arr, func) { // Drop them elements. for(var start=0 ;start<arr.length; start++){ if ...
- nginx 自动填充index.php
if (!-e $request_filename) { rewrite ^/(.+?\.php)/?(.*)$ /$/$ last; rewrite ^/(.*)$ /index.php/$ las ...
- 洛谷P1993 小K的农场_差分约束_dfs跑SPFA
Code: #include<cstdio> #include<queue> using namespace std; const int N=10000+233; const ...
- BZOJ 3878 [AHOI&JSOI2014]奇怪的计算器 (线段树)
题面:BZOJ传送门 洛谷传送门 线段树好题 题目保证$a$一定是正整数,容易发现计算结果是单调的 我们把询问离线,并按照从小到大排序 某次操作可能导致某些位置达到边界$L/R$ 根据单调性的结论 这 ...