c语言数字图像处理(三):仿射变换
仿射变换及坐标变换公式
几何变换改进图像中像素间的空间关系。这些变换通常称为橡皮模变换,因为它们可看成是在一块橡皮模上印刷一幅图像,然后根据预定的一组规则拉伸该薄膜。在数字图像处理中,几何变换由两个基本操作组成:
(1)坐标的空间变换
(2)灰度内插,即对变换后的像素赋灰度值
坐标变换公式
(x,y) = T{(v, w)}
其中,(v, w)是原图像中像素的坐标,(x, y)是变换后图像中像素的坐标。最常用的空间坐标变换之一是仿射变换
基于上式的仿射变换公式

实际上,我们可以用两种方法来使用上式。第一种方法称为向前映射,它由扫描输入图像的像素,并在每个位置(v, w)用上式直接计算输出图像中相应像素的空间位置(x, y)组成。向前映射算法的一个问题是输入图像中的两个或更多个像素可被变换到输出图像的同一位置,这就产生了如何把多个输出值合并到一个输出像素的问题。第二种方法,反向映射,扫描输出像素的位置,并在每一个位置(x, y)使用(v, w) = T-1(x, y)计算输入图像中的相应位置。然后通过内插决定输出像素的灰度值。本篇文章使用反向映射。
<以上基础知识来源于 《数字图像处理》冈萨雷斯 P50-P51 读者可自行查阅>
在上一篇文章中,主要是图片的放大与缩小,在灰度内插的过程中也涉及到目标图像到原图像的坐标变换,代码如下
void bilinera_interpolation(short** in_array, short height, short width,
short** out_array, short out_height, short out_width)
{
double h_times = (double)out_height / (double)height,
w_times = (double)out_width / (double)width;
short x1, y1, x2, y2, f11, f12, f21, f22;
double x, y; for (int i = ; i < out_height; i++){
for (int j = ; j < out_width; j++){
x = j / w_times;
y = i / h_times;
x1 = (short)(x - );
x2 = (short)(x + );
y1 = (short)(y + );
y2 = (short)(y - );
f11 = is_in_array(x1, y1, height, width) ? in_array[y1][x1] : ;
f12 = is_in_array(x1, y2, height, width) ? in_array[y2][x1] : ;
f21 = is_in_array(x2, y1, height, width) ? in_array[y1][x2] : ;
f22 = is_in_array(x2, y2, height, width) ? in_array[y2][x2] : ;
out_array[i][j] = (short)(((f11 * (x2 - x) * (y2 - y)) +
(f21 * (x - x1) * (y2 - y)) +
(f12 * (x2 - x) * (y - y1)) +
(f22 * (x - x1) * (y - y1))) / ((x2 - x1) * (y2 - y1)));
}
}
}
其中,第11,12行为目标图像到原图像的坐标变换,接下来根据仿射变换公式对图像做进一步处理
水平偏移变换
水平偏移变换公式为
x = v
y = Sh * v + w
反解上述公式得
v = x
w = y - Sh * v
结果为目标图像到原图像的坐标变换,令Sh = 0.5,并对应用到上述代码11,12行,同时将图像扩大到2800*1280,结果为

旋转变换
旋转变换公式
x = vcosθ - wsinθ
y = vsinθ + wcosθ
令θ = ∏/4,反解得
v = x/√2 + y/√2
w = y/√2 - x/√2
将图像扩大为2000*2000,但是这个时候得到的图像为
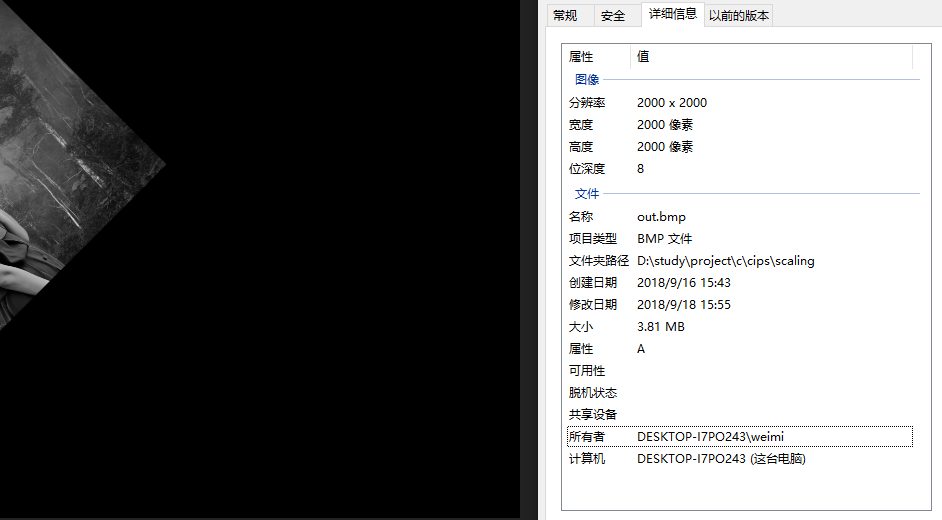
为了解决这一问题,使旋转后的图像位于中央,我将所得图片右移m_w, 下移m_h,则公式变为
x = vcosθ - wsinθ + m_w
y = vsinθ + wcosθ + m_h
令θ = ∏/4,反解得
v = (x + y - m_h - m_w)/√2
w = (y - x - m_h + m_w)/√2
结果为

其余变换原理基本相同,因此不再进行演示
c语言数字图像处理(三):仿射变换的更多相关文章
- c语言数字图像处理(九):边缘检测
背景知识 边缘像素是图像中灰度突变的像素,而边缘是连接边缘像素的集合.边缘检测是设计用来检测边缘像素的局部图像处理方法. 孤立点检测 使用<https://www.cnblogs.com/Gol ...
- c语言数字图像处理(二):图片放大与缩小-双线性内插法
图像内插 假设一幅大小为500 * 500的图像扩大1.5倍到750 * 750,创建一个750 * 750 的网格,使其与原图像间隔相同,然后缩小至原图大小,在原图中寻找最接近的像素(或周围的像素) ...
- c语言数字图像处理(一):bmp图片格式及灰度图片转换
本篇文章首先介绍了bmp图片格式,主要参考wiki上的内容,包括bmp文件的存储方式,对于一些常见的bmp文件格式都给了例子,并且对8位 16位RGB555 16位RGB565格式的bmp文件进行了简 ...
- c语言数字图像处理(十):阈值处理
定义 全局阈值处理 假设某一副灰度图有如下的直方图,该图像由暗色背景下的较亮物体组成,从背景中提取这一物体时,将阈值T作为分割点,分割后的图像g(x, y)由下述公式给出,称为全局阈值处理 多阈值处理 ...
- c语言数字图像处理(八):噪声模型及均值滤波器
图像退化/复原过程模型 高斯噪声 PDF(概率密度函数) 生成高斯随机数序列 算法可参考<http://www.doc.ic.ac.uk/~wl/papers/07/csur07dt.pdf&g ...
- c语言数字图像处理(七):频率域滤波
代码运行了两个小时才出的结果,懒得测试了,这一部分先鸽了,等对DFT算法进行优化后再更
- c语言数字图像处理(六):二维离散傅里叶变换
基础知识 复数表示 C = R + jI 极坐标:C = |C|(cosθ + jsinθ) 欧拉公式:C = |C|ejθ 有关更多的时域与复频域的知识可以学习复变函数与积分变换,本篇文章只给出DF ...
- c语言数字图像处理(五):空间滤波
空间滤波原理 使用大小为m*n的滤波器对大小为M*N的图像进行线性空间滤波,将滤波器模板乘以图像中对应灰度值,相加得模板中心灰度值 a = (m-1)/2, b = (n-1)/2 若f(x+s, y ...
- c语言数字图像处理(四):灰度变换
灰度变换 灰度变换函数 s = T(r) 其中r为输入图像在(x, y)点处的灰度值,s为输出图像在(x, y)点处的灰度值 灰度变换的作用 上图所示的两幅T(s)函数的图像曲线,第一幅图可以增强 ...
随机推荐
- oracl数据库中的substr()函数的用法
substr:字符串截取. 1.substr:(字符串 | 列 ,开始点):从开始一直截取到结尾. select substr(zym,2) from bqh4 2.substr:(字符串 | 列 , ...
- Django之基于iframe的ajax伪造
IFRAME是HTML标签,作用是文档中的文档,或者浮动的框架(FRAME).iframe元素会创建包含另外一个文档的内联框架 ajax的理念是不进行浏览器页面刷新的信息获取更新,也就是局部刷新. 那 ...
- Mysql 5.7源码编译启动 报error问题:The server quit without updating PID file (/data/data_mysql/mysql.pid).
一般是报error问题就是我们的mysql没有权限,这里主要是指三点:一个是mysql的安装主目录要设为mysql用户和用户组.一个是logs目录设置为mysql用户以及用户组.还有一个是data目录 ...
- 阿里八八Alpha阶段Scrum(4/12)
今日进度 叶文滔: 整合了一下已完成的界面设计,修复了一些BUG. 问题困难:制作多级悬浮按钮阻碍重重,首先是刚更新不久的Andriod Studio 3.0向前兼容性差,一些语句规则的修改无所适从, ...
- jQuery 1.11 / 2.1 beta 版发布
jQuery开发团队近日发布了jQuery 1.11和2.1的beta版本. jQuery 1.x版本支持IE 6/7/8,jQuery 2.x 不支持,如果你已经抛弃了IE 6/7/8用户,可以升级 ...
- 【2018暑假集训模拟一】Day1题解
T1准确率 [题目描述] 你是一个骁勇善战.日刷百题的OIer. 今天你已经在你OJ 上提交了y 次,其中x次是正确的,这时,你的准确率是x/y.然而,你最喜欢一个在[0; 1] 中的有理数p/q(是 ...
- PHP常用算法和数据结构示例
<?php header("content-type:text/html;charset=utf-8"); $arr=array(3,5,8,4,9,6,1,7,2); ec ...
- 20145236《网络对抗》进阶实验——Return-to-libc攻击
20145236<网络对抗>进阶实验--Return-to-libc攻击 基础知识 Return-into-libc攻击方式不具有同时写和执行的行为模式,因为其不需要注入新的恶意代码,取而 ...
- Docker技术入门与实战 第二版-学习笔记-4-Dockerfile外其他生成镜像的方法
其它生成镜像的方法 即除了标准地使用Dockerfile来生成镜像外,还有一些其他的方法 1)从 rootfs 压缩包导入 格式:docker import [选项] <文件>|<U ...
- leetcode367--Valid Perfect Square
Given a positive integer num, write a function which returns True if num is a perfect square else Fa ...