第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】

版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用、发布、转载等,否则将追究其法律责任。
使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!!
第一章节 BJROBOT ROS 网络配置及移动控制
1.工控机的系统用户名为 robot,密码:bjrobot
远程登录方式:a.teamview, 输入工控机IP,密码即可登录;
b.ssh登录:ssh bjrobot@192.168.50.102 密码:bjrobot
2.RK3399 Nanopi、树莓派 4b 的系统用户名为 pi,密码也是 pi
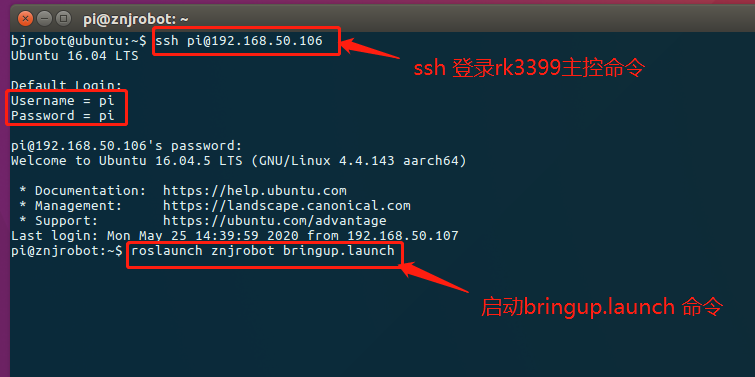
远程登录方式:a. ssh登录: ssh pi@192.168.50.100 密码:pi
b. vnc,输入用户名密码即可登录;
(需要先ssh登录到RK3399,启动/home/pi目录下的runVino.sh文件(启动命令为:./runVino.sh))
3.英伟达Nano 的系统用户名为 ubuntu, 密码:ubuntu
远程登录方式:a.vnc,输入Nano的IP,密码即可登录;
b.ssh登录: ssh ubuntu@192.168.50.106 密码:ubuntu
Teamview实现局域网内登录,需修改teamview选项中的网络设置选项中的呼入的LAN连接选项为<接受>,如下图所示:

用户名和密码是 ssh 连接的关键。
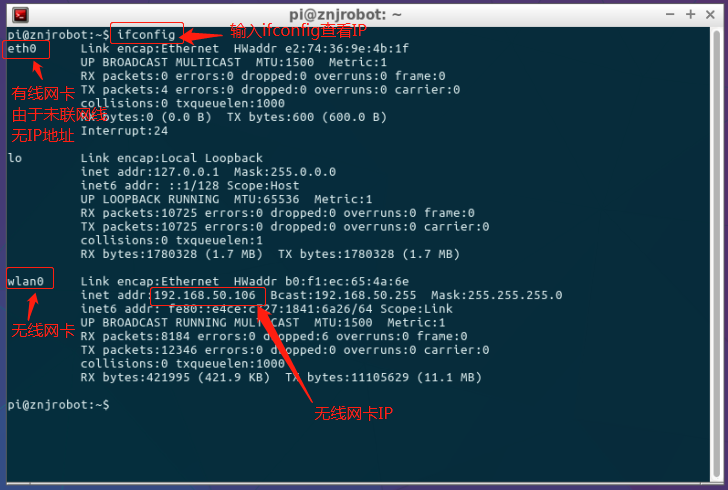
4.把小车组装好,电池充满电,小车主控接 HDMI 接口的显示器连接无线网络,进入系统,打开一个终端输入ifconfig,回车,记下小车无线网卡 ip。
5.下载资料配套虚拟机(我们提供的虚拟机已经安装好 ROS,已经编译好我们的源码与构建好相关环境),把虚拟机网络设配器设置成桥接模式。
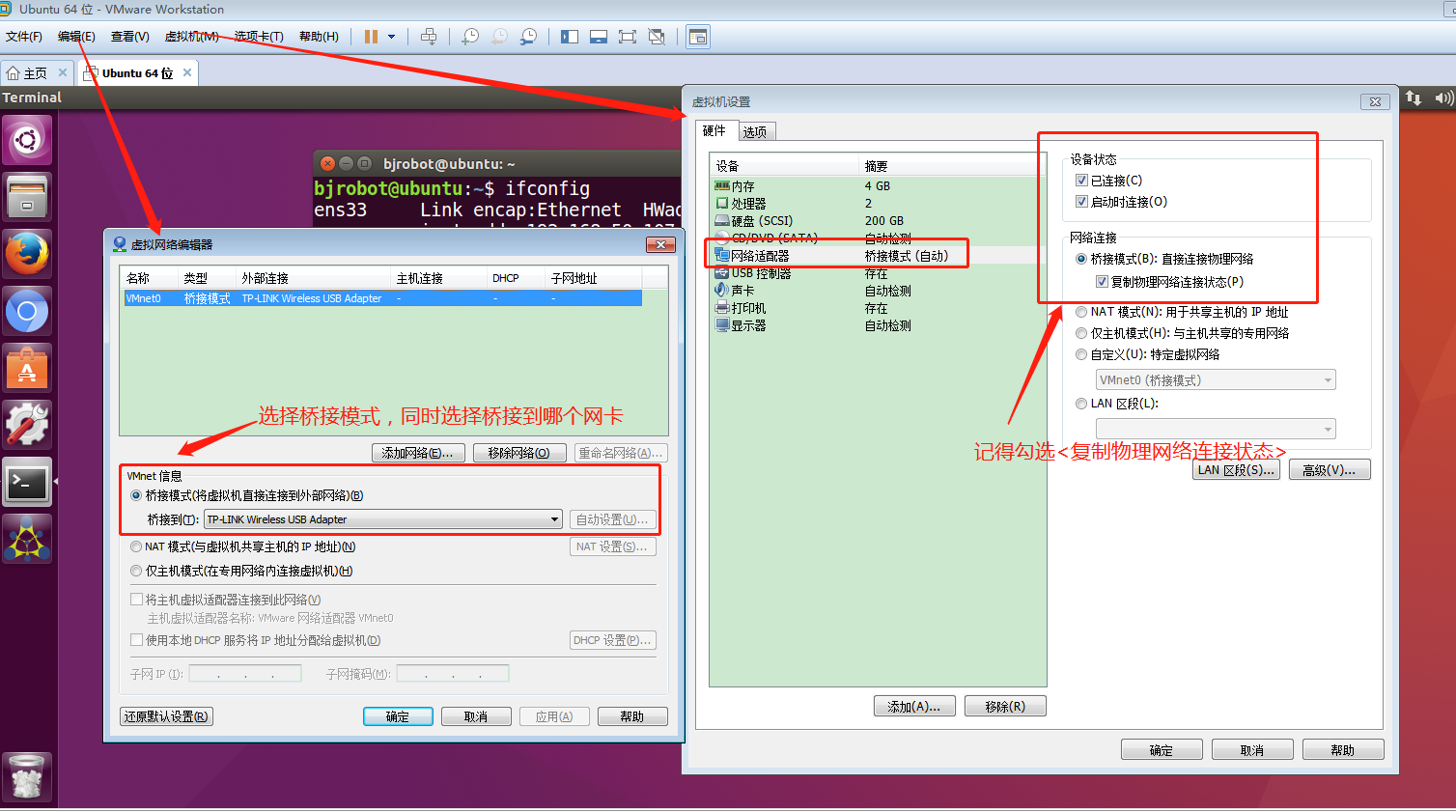
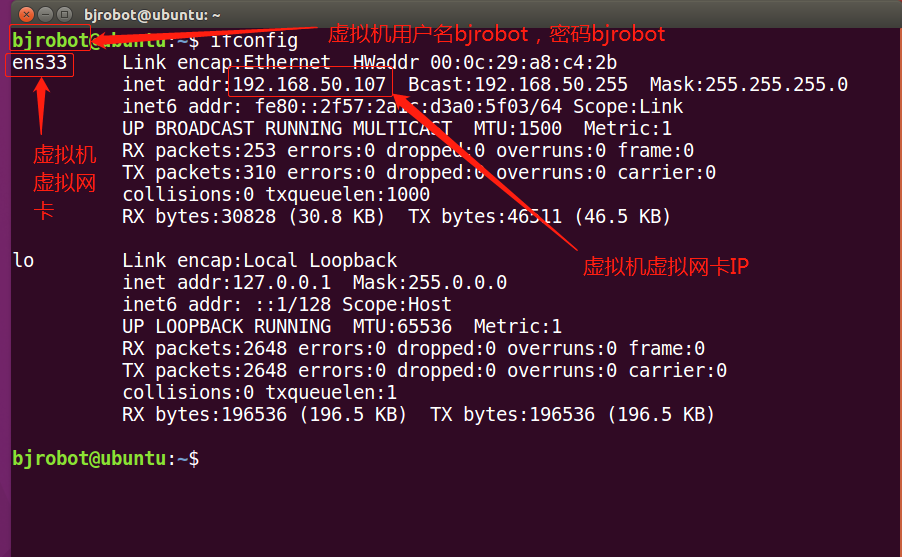
虚拟机确保桥接上PC 的网卡,并且能分配到 IP,跟小车主控连在同一个路由器的局域网内,同一网段!一定要同一网段!!(确保二者能相互ping通)
虚拟机端 vim ~/.bashrc,鼠标滚轮把光标移动到文件底端,按下图操作。
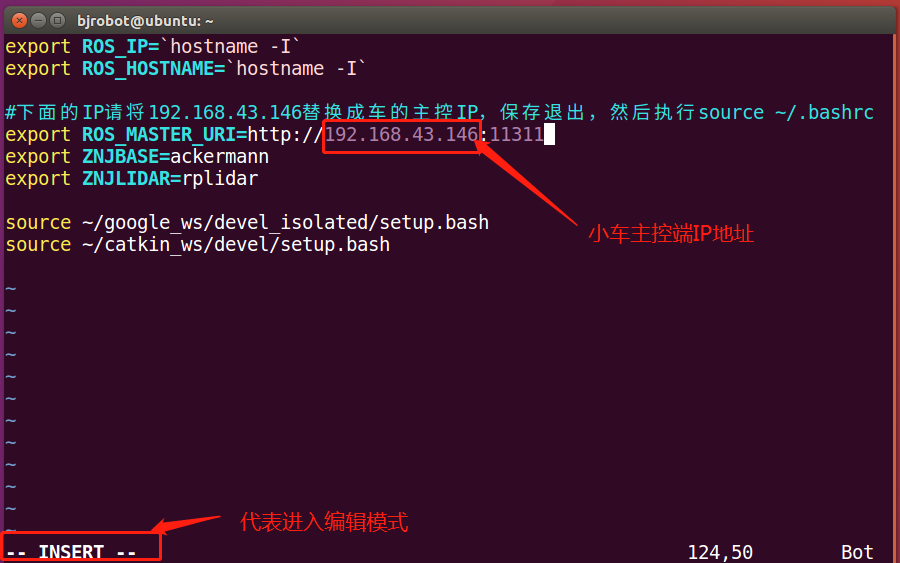
改好之后 退出编辑模式后,source ~/.bashrc 使之马上生效。
6.至此,虚拟机和主控端的控制相关配置以及设置好,接下来在虚拟机端打开一个终端ssh 过去小车主控端启动 roslaunch znjrobot bringup.launch 。
7.在虚拟机端再打开另外一个终端直接启动键盘控制。rosrunteleop_twist_keyboard teleop_twist_keyboard.py
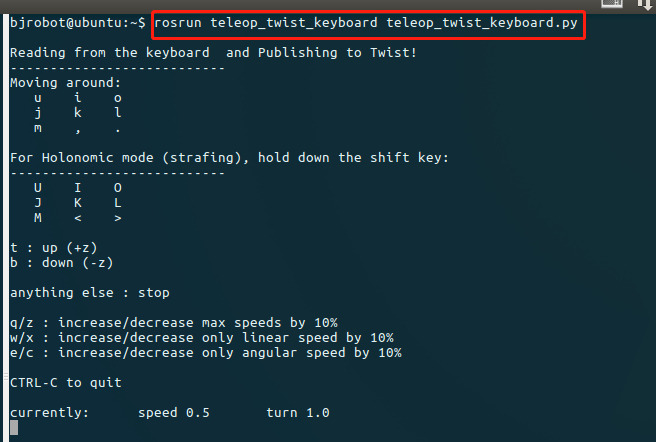
至此小车可以在虚拟机端通过键盘进行移动控制。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736


第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
随机推荐
- buuctf-web-[极客大挑战 2019]BuyFlag 1
打开网页,然后发现menu中有个buyflag的连接,点进去 如果你想买这个flag ,你必须是来自CUIT的一名学生,还必须回答正确的密码.简单了解,我们查看源码,发现思路 POST方式传入两个参数 ...
- Mac下安装Mesa
下载Mesa源代码: git clone https://gitlab.freedesktop.org/mesa/mesa.git 如果下载太慢,请参看 下载国外资源. 我下载后看到的Mesa版本信息 ...
- Linux 挂载,卸载光盘
首先我们点击虚拟机 点击设置 选择CD 接着我们将设备状态两个勾都勾选,并且ISO映像文件选择我们需要挂载的光盘 点击了确定之后,我们到centos7的命令行下 1,创建挂载目录 mkdir /mnt ...
- 1、pytorch写的第一个Linear模型(原始版,不调用nn.Modules模块)
参考: https://github.com/Iallen520/lhy_DL_Hw/blob/master/PyTorch_Introduction.ipynb 模拟一个回归模型,y = X * w ...
- Flutter开发实战笔记
下载 https://flutter.cn/docs/get-started/install/macos#get-sdk 配置环境变量 export PATH="$PATH:[PATH_TO ...
- 写给OIer们的一些话(修订版)
我是一个高二的OIer,离我正式退役的日子已经不超过一年了.在这个时期,与其写一些回忆性的文字,不如跳出"自我"的范畴,以一种比较全局的角度和大家一起分享一些我对OI的认知和看法. ...
- Java经典小游戏——贪吃蛇简单实现(附源码)
一.使用知识 Jframe GUI 双向链表 线程 二.使用工具 IntelliJ IDEA jdk 1.8 三.开发过程 3.1素材准备 首先在开发之前应该准备一些素材,已备用,我主要找了一个图片以 ...
- Restful规则及JPA导致内存溢出
HTTP动词 对于资源的具体操作类型,由HTTP动词表示. 常用的HTTP动词有下面五个(括号里是对应的SQL命令). GET(SELECT):从服务器取出资源(一项或多项). POST(CREATE ...
- IO流(03)--序列化流、打印流
序列化流 Java提供了一种对象序列化的机制,用一个字节序列可以表示一个对象,该字节序列包含该对象的数据.对象的类型和对象中存储的属性等信息.字节序列写入到文件中后,就相当于在文件中保存了一个对象信息 ...
- oracle 常用语句2
-- number(38) -- char(2000) -- varchar(4000) create table student( sno number(3) primary key, sname ...