第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行!
1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot bringup.launch。
2.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot camera.launch。

3.在虚拟机端打开一个终端,再次 ssh 过去小车主控端启动roslaunch znjrobot navigate.launch。

4.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。

5.全屏化后点击 File,点击 Open Config,
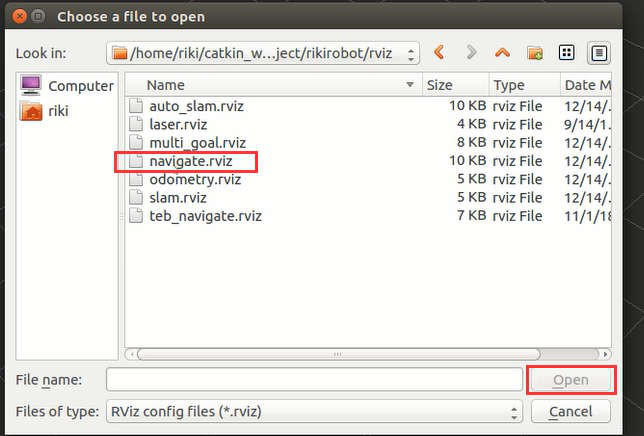
6.找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/navigate.rviz,的navigate.rviz 文件。点 Open

7.把 rviz 窗口地图调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。然后校正位姿。
8.安卓手机下载网盘导航 APP,并安装。
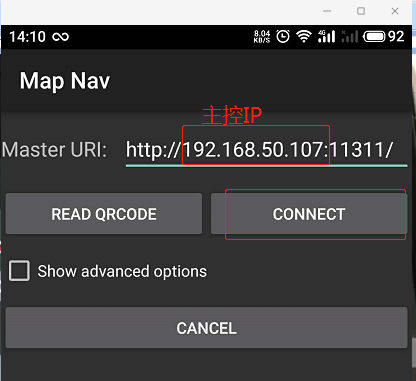
9.安卓手机和小车主控要连接在同一个路由器的 WIFI,打开导航 app,如下图所示,Master URI 要指向主控端的IP,如以下 ip:192.168.50.107 要改成你们小车连接 wifi 后实际的IP 然后点击 CONNECT.

10.点击手机 AAP 上的 Set Goal,然后再手机看到的地图上,点击屏幕不松开,此时会出现一个蓝色箭头,这个箭头方向就是小车到达目标点后的车头朝向。松开后即可完成导航目标点设定。
第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
随机推荐
- Jdk源码-集合类主要原理和解析
写在前面 熟悉Jdk原理的重要性不言而喻,作为Java开发者或者面试者,了解其实现原理也显得更为装逼,在Java读书计划我写到了,它是面试中最基础的一部分,所以单独拿出来做个总结,为了更好滴理解和学习 ...
- PyQt(Python+Qt)学习随笔:QDial刻度盘部件功能简介
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一.概述 Designer中的Dial刻度盘输入部 ...
- 第14.7节 Python模拟浏览器访问实现http报文体压缩传输
一. 引言 在<第14.6节 Python模拟浏览器访问网页的实现代码>介绍了使用urllib包的request模块访问网页的方法.但上节特别说明http报文头Accept-Encodin ...
- Mybatis04
title: Mybatis学习04 date: 2020-01-20 21:48:00 tags: 这次的笔记主要是mybatis中的注解 1.实体类的注解 实体类的注解在mybati的XML文件中 ...
- CQUT校园通知网消息爬虫+Server酱微信推送
上了大三之后发现很多学校的通知都不会发送到班群里面,导致自己会错过很多重要信息,故想写一个爬虫来获取从当前时间之后的新的通知标题,并推送到微信上. PS:推送到微信上这个想法来源是,很多时候都需要将消 ...
- 团队作业3_需求改进&系统设计
一.需求&原型改进 1.需求改进: (1)发现问题:通过发布问卷调查及收集整理的形式发现用户的新需求: (2)修改需求:考虑新增提醒用户未完成事件的功能. 附:用户调查问卷(如下) 调研途 ...
- vue中监视对象内部变化的三种方法
一,对整个对象监视 watch:{ obj:{ handler(newV,oldV){ console.log('obj changed') }, deep: true,//深度遍历 immediat ...
- 原生js之事件解绑
#removeEventListener ##html <button id='btn'>click</button> ##js ###第一种方式(错误方式) var btn ...
- 【Codeforces 1037H】Security(SAM & 线段树合并)
Description 给出一个字符串 \(S\). 给出 \(Q\) 个操作,给出 \(L, R, T\),求字典序最小的 \(S_1\),使得 \(S^\prime\) 为\(S[L..R]\) ...
- linux tar 压缩和解压缩
tar -c: 建立压缩档案-x:解压-t:查看内容-r:向压缩归档文件末尾追加文件-u:更新原压缩包中的文件 这五个是独立的命令,压缩解压都要用到其中一个,可以和别的命令连用但只能用其中一个. 下面 ...