第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】

BJROBOT 线速度校正
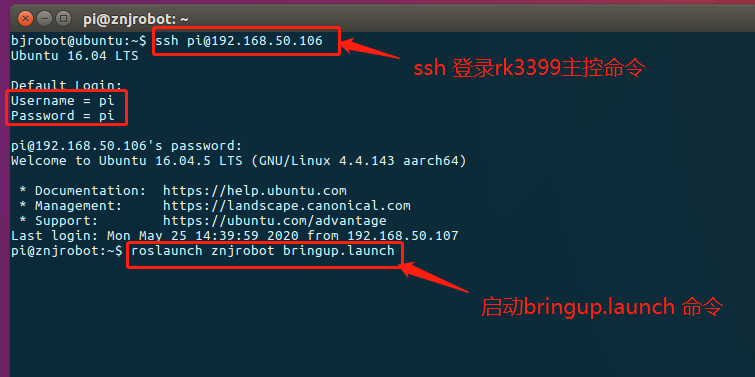
1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动
roslaunch znjrobot bringup.launch。
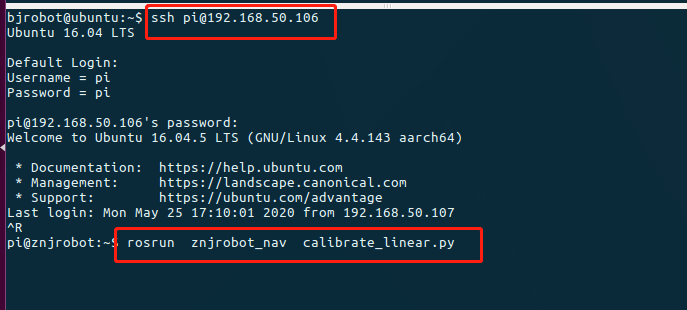
2.在虚拟机端打开一个终端,ssh 过去小车主控端,启动校正线速度命令rosrunznjrobot_nav calibrate_linear.py
3.在虚拟机端再打开一个终端,直接启动 rosrunrqt_reconfigure rqt_reconfigure

4点击 start_test,进行第一次的走一米测试,测量小车走的距离。
假如小车走了 1.1 米,那么线速度的比例系数 linear_scale = 1.1/1=1.1 假如小车走了 0.9 米,那么线速度的比例系数 linear_scale = 0.9/1= 0.9
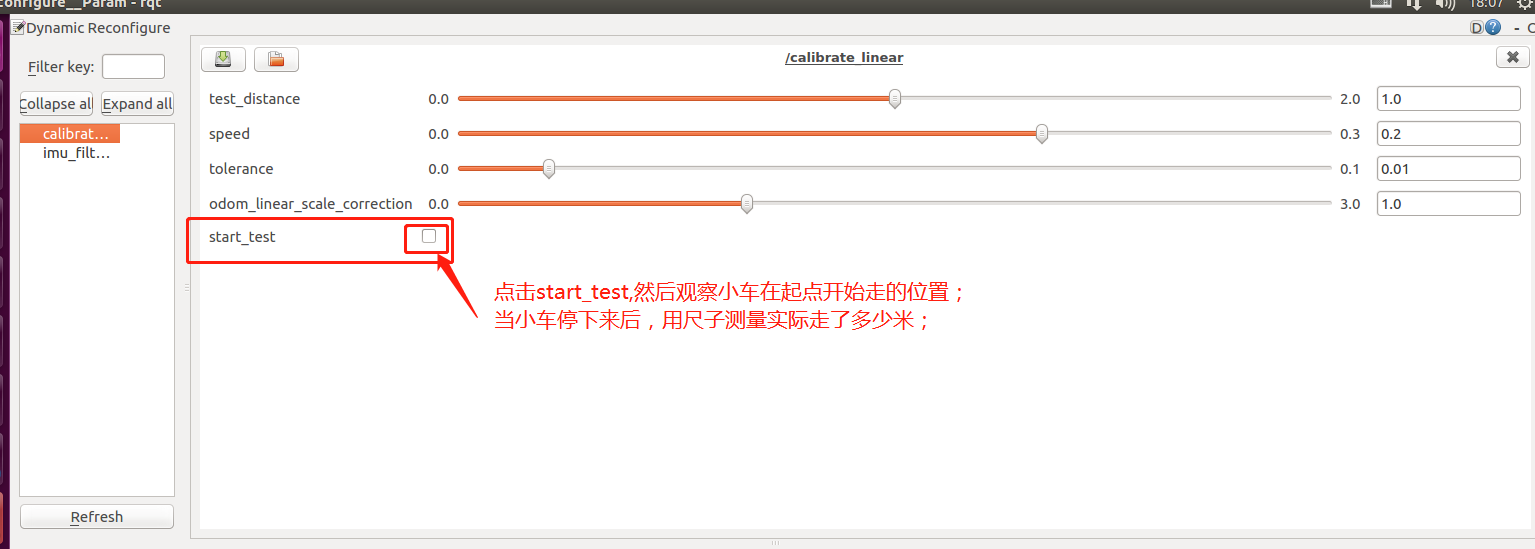
5.然后车放回原来起点位置,把比例系数修改到下图所示位置,再点击 start_test,当小车停下来的时候,再次测量小车是否走了一米,如果接近或者差不多 1 米,那么这个比例系数就是正确的。误差再 1 厘米以内可以接
受。
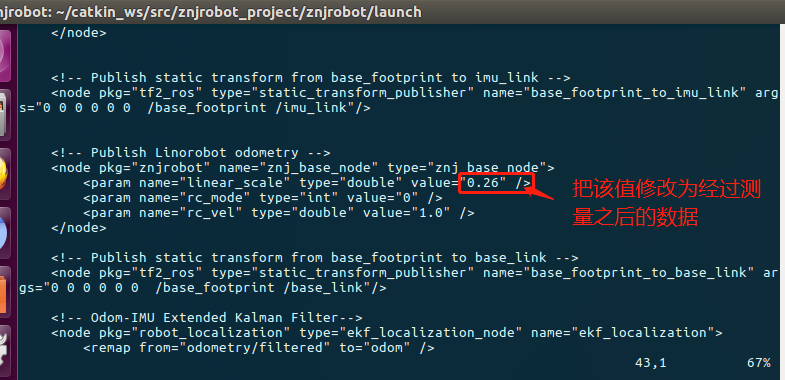
6.在主控端的bringup.launch 文件中把linear_scale 修改成实际计算好的线速度比例系数。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736


第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
随机推荐
- 关于老猿Python系列文章发布网址变化的说明
老猿Python系列文章最开始在新浪发布,后逐渐开通了CSDN.博客园和简书三个网址,但老猿一来工作忙,二来Python需要学习的内容太多,因此实在没时间同时维护这么多博客,事实上除了CSDN其他网站 ...
- 第4.2节 神秘而强大的Python生成器精讲
一. 生成器(generator)概念 生成器是一个特殊的迭代器,它保存的是算法,每次调用next()或send()就计算出下一个元素的值,直到计算出最后一个元素,没有更多的元素时,抛出StopIte ...
- 第15.35节 PyQt编程实战:结合QDial实现的QStackedWidget堆叠窗口程序例子
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 一.案例说明 本案例是老猿在学习QStackedWidget中的一个测试案例,该案例使用QStack ...
- PyQt(Python+Qt)学习随笔:QAbstractItemView的selectionMode属性
老猿Python博文目录 老猿Python博客地址 一.概述 selectionMode属性用于控制view中操作选择数据项的模式,用于控制用户是否可以选择一个或多个数据项,以及在多个数据项选择中,选 ...
- element ui中表格table翻页记忆勾选状态
<el-table ref="multipleTable" :data="datalist" style="width:100%" @ ...
- 深入理解Java虚拟机(五)——JDK故障处理工具
进程状况工具:jps jps(JVM Process Status Tool) 作用 用于虚拟机中正在运行的所有进程. 显示虚拟机执行的主类名称以及这些进程的本地虚拟机唯一ID. 可以通过RMI协议查 ...
- 查找列表中的元素,移动空格 并查找以a或A 为开头 并以c 结尾的元素
li = ['alec',' aric','Alex','Tony','rain']tu = ('alec',' aric','Alex','Tony','rain')dic = { 'k1':'al ...
- (数据科学学习手札100)搞定matplotlib中的字体设置
本文示例文件已上传至我的Github仓库https://github.com/CNFeffery/DataScienceStudyNotes 1 简介 matplotlib作为数据可视化的利器,被广泛 ...
- thinkphp thinkphp6 安装JWT
第一步:composer安装 composer require firebase/php-jwt 下图是执行成功 cd 进入项目目录的vendor 找到firebase 看到下面有一个php-jw ...
- 使用MySQL Shell创建MGR
本篇知识点: 配置MGR所需的参数 使用MySQL Shell配置MGR shell.connect() var 设定临时变量 dba.createCluster() dba.getCluster() ...