第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
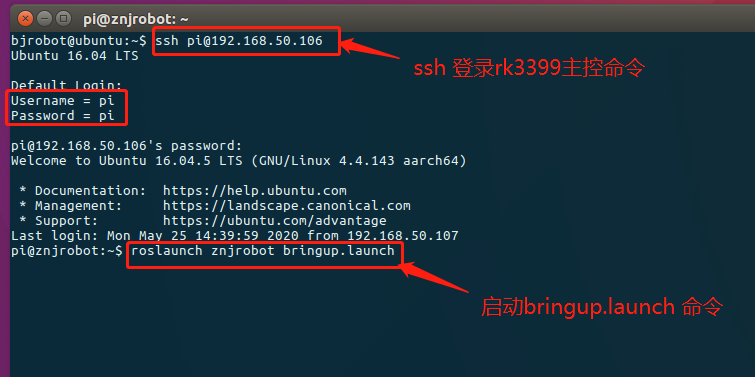
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch
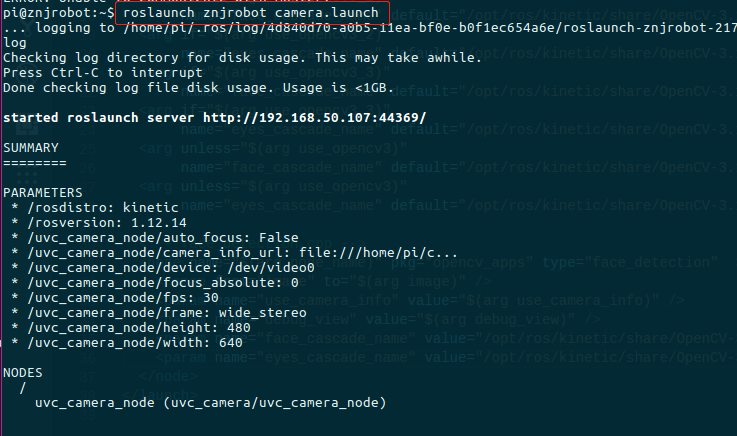
2.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot camera.launch
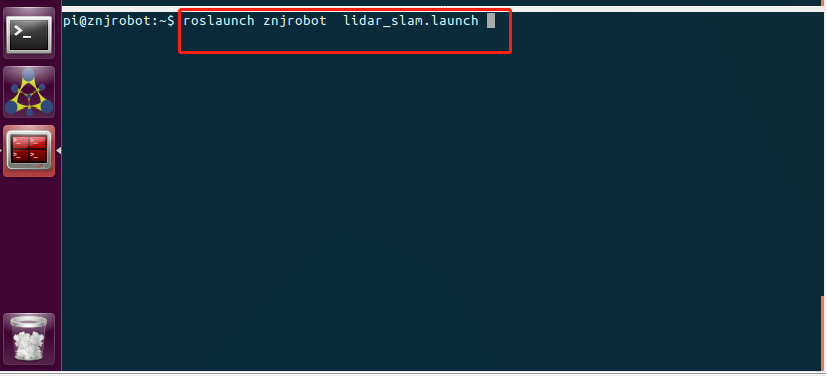
3.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot lidar_slam.launch
4.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
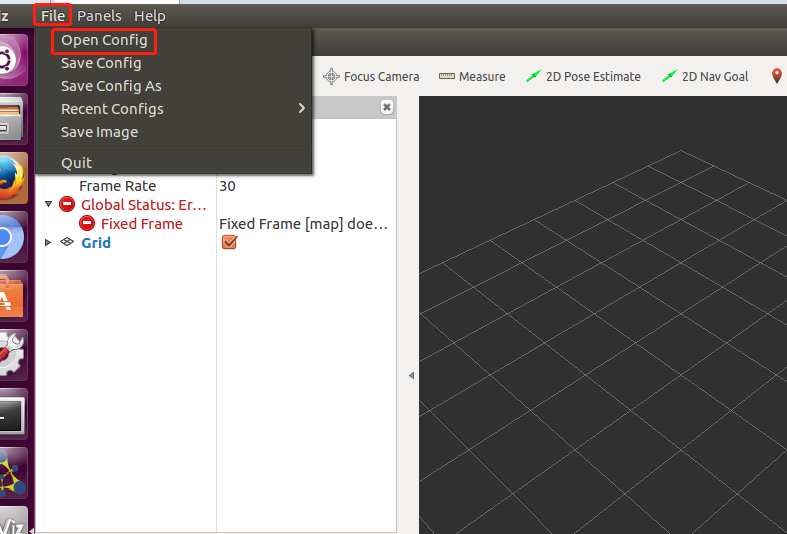
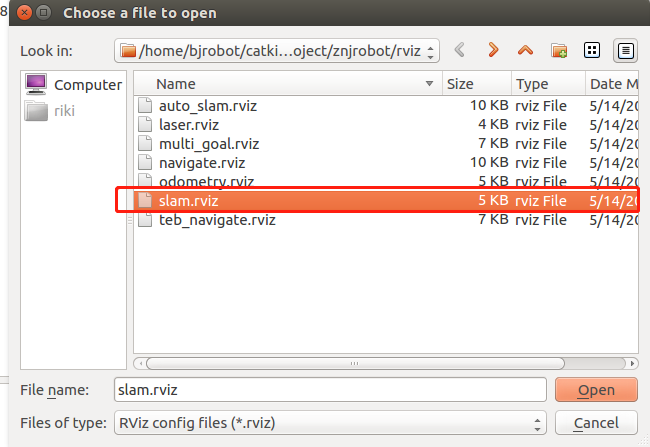
5.全屏化后点击 File,点击 Open Config,

6.找到~/catkin_ws/src/znjrobot_project/znjrobot/rviz/路径下,的 slam.rviz 文件。点击 Open
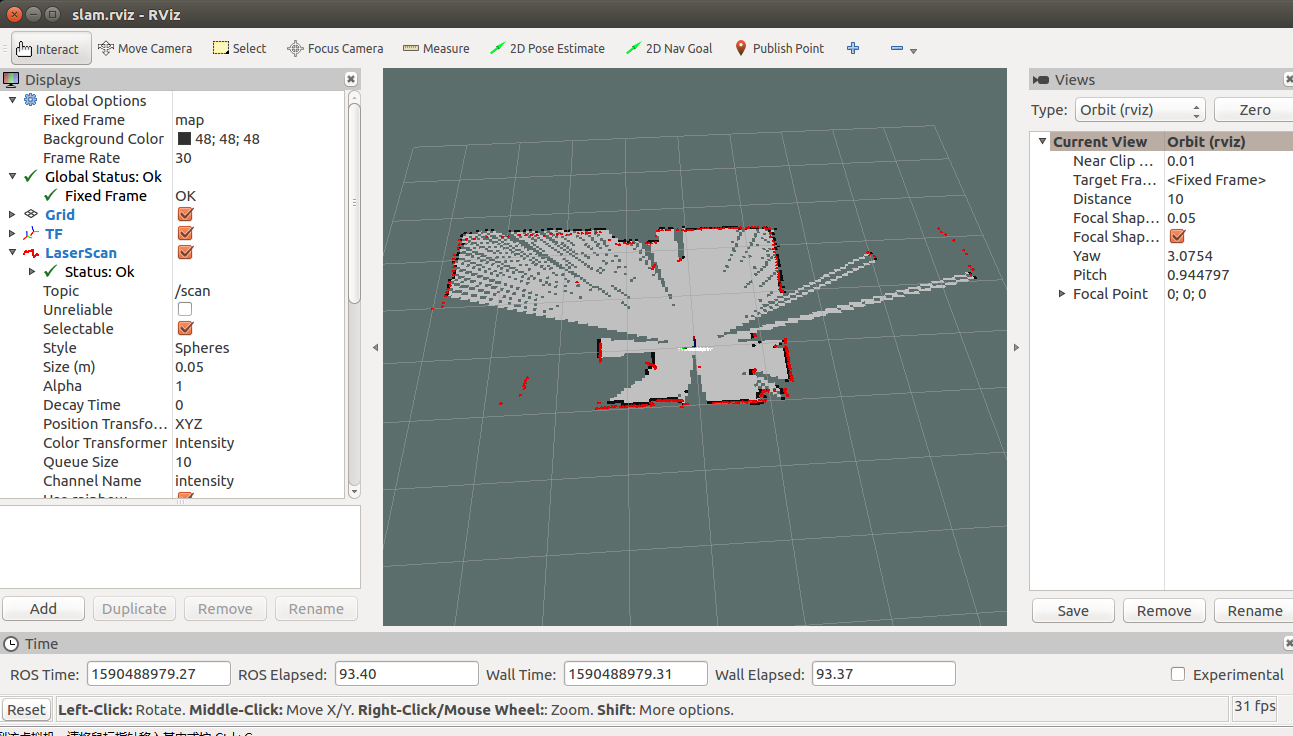
7.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图; 鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
8.安卓手机下载网盘资料的 Make Map.apk 并安装。
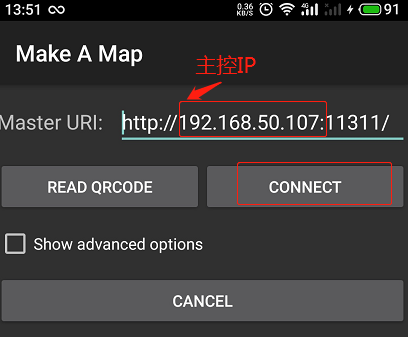
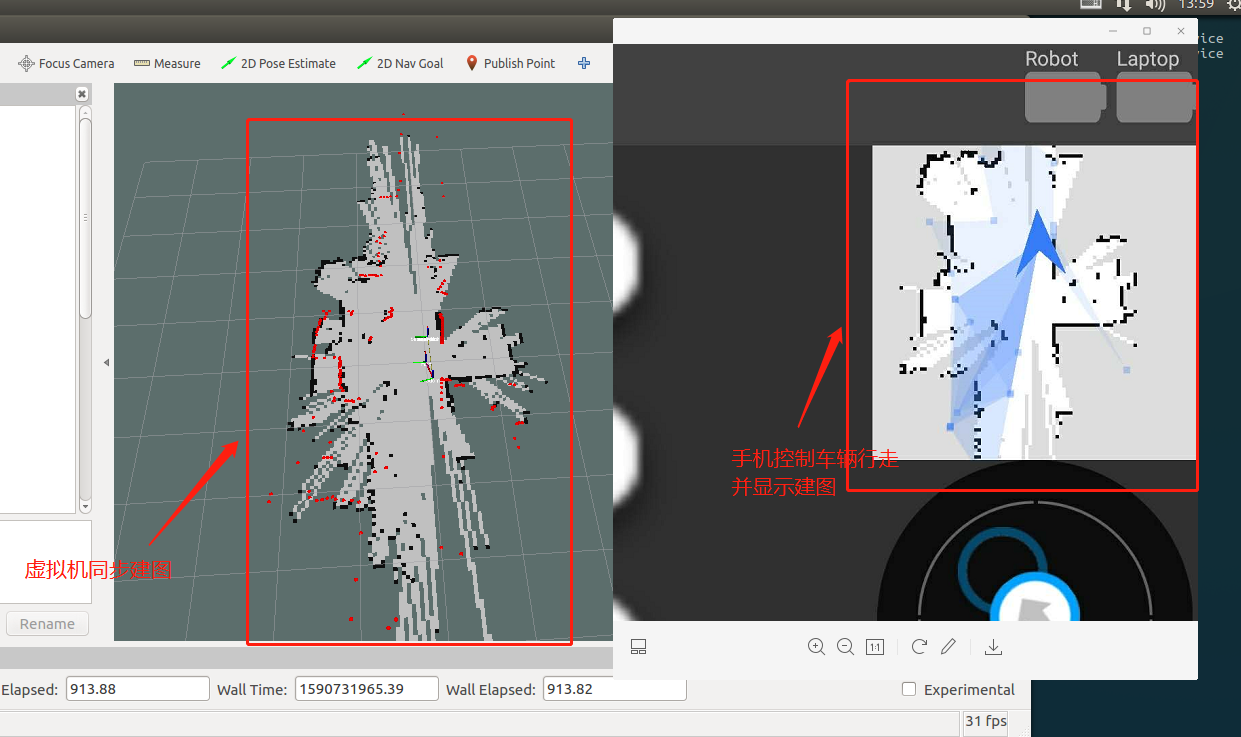
9.安卓手机和小车主控要连接在同一个路由器的 WIFI,打开 Make Map app,如下图所示, Master URI 要指向主控端的 IP,如以下 ip:192.168.50.107 要改成你们小车连接 wifi 后实际的 IP 然后点击CONNECT。
10.通过手机 app 轮盘控制小车移动,完成地图构建。
11.当该区域内的地图扫描完毕后,在虚拟机端,再打开一个终端,ssh 过去主控端, 进入到~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本, 执行保存地图脚本前后可以通过 ll ,查看地图的大小时间等来初步判断地图有无保存成功。
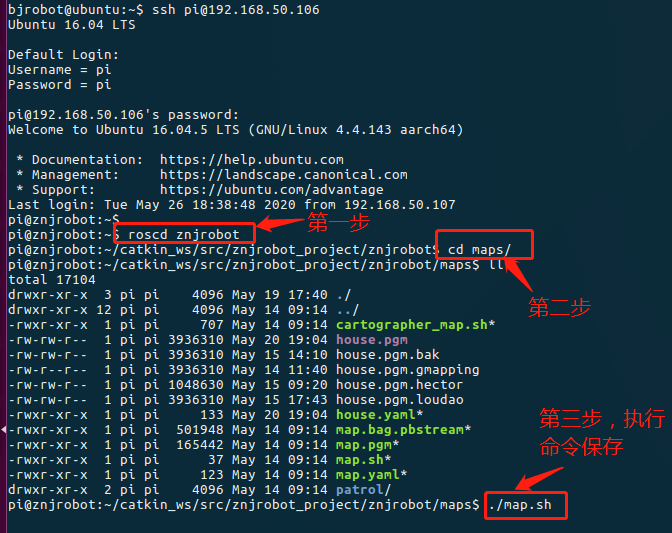
执行完成后,即可查看到在目录下重新生成的house.pgm文件。
第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
随机推荐
- Mybatis报错invalid comparison: java.util.Date and java.lang.String
请求参数中两个属性确实都是date类型,数据库也确认是data类型,这个错误是因为 在这里把date类型的参数与单引号做了比较出现的,删除就可以正常运行了.
- PyQt(Python+Qt)学习随笔:QMainWindow的addDockWidget方法增加QDockWidget停靠窗到主窗口
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 DockWidget除了放在QMainWindow窗口内外,也可以放在 ...
- 第8.23节 Python中使用sort/sorted排序与“富比较”方法的关系分析
一. 引言 <第8.21节 Python中__lt__.gt__等 "富比较"("rich comparison")方法用途探究>和<第8.2 ...
- PyQt(Python+Qt)学习随笔:窗口的布局设置及访问
老猿Python博文目录 老猿Python博客地址 在Qt Designer中,可以在一个窗体上拖拽左边的布局部件,在窗口中进行布局管理,但除了基于窗体之上进行布局之外,还需要窗体本身也进行布局管理才 ...
- Acwing 393. 雇佣收银员
算法1: 差分约束 + 枚举 O(Tn2028) 由于牵扯到 \([i - 8 + 1, i]\) 这段区间的和的约束,所以用前缀和更好表达一些. 设 \(num[i]\)表示 \(i\) 时刻有多少 ...
- Spark3.0中Dates和Timestamps
Spark3.0使用的是预公历,而之前都是儒略历和公历的混合(即1582年之前的日期使用儒略历,1582年之后使用公历,java.sql.Date这个API用的就是这种,而Java8里使用java.t ...
- 深入理解Java虚拟机(五)——JDK故障处理工具
进程状况工具:jps jps(JVM Process Status Tool) 作用 用于虚拟机中正在运行的所有进程. 显示虚拟机执行的主类名称以及这些进程的本地虚拟机唯一ID. 可以通过RMI协议查 ...
- swiper4使用教程-填坑
本篇博客用于记录使用swiper插件中的一些关键点: 首先附上官网地址:https://www.swiper.com.cn/ ios中使用swiper的坑: /*解决swiper中苹果点击变暗,在cs ...
- C++ 虚函数表与多态 —— 虚函数表的内存布局
C++面试经常会被问的问题就是多态原理.如果对C++面向对象本质理解不是特别好,问到这里就会崩. 下面从基本到原理,详细说说多态的实现:虚函数 & 虚函数表. 1. 多态的本质: 形 ...
- IOS中使用.xib文件封装一个自定义View
1.新建一个继承UIView的自定义view,假设类名叫做 MyAppVew #import <UIKit/UIKit.h> @class MyApp; @interface MyAppV ...