第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU、角速度、线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界、虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!!
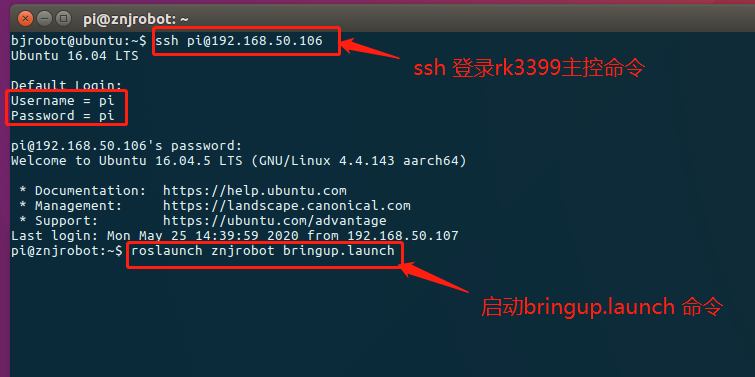
1.把小车平放在你想要构建地图的区域内地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
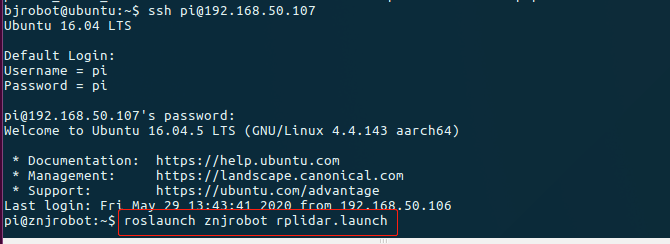
2.在虚拟机端,再打开一个终端,ssh 过去小车主控端启动, roslaunch znjrobot rplidar.launch
3.在虚拟机端,再打开一个终端,ssh 过去小车主控端启动, roslaunch znjrobot cartographer_slam.launch

4.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
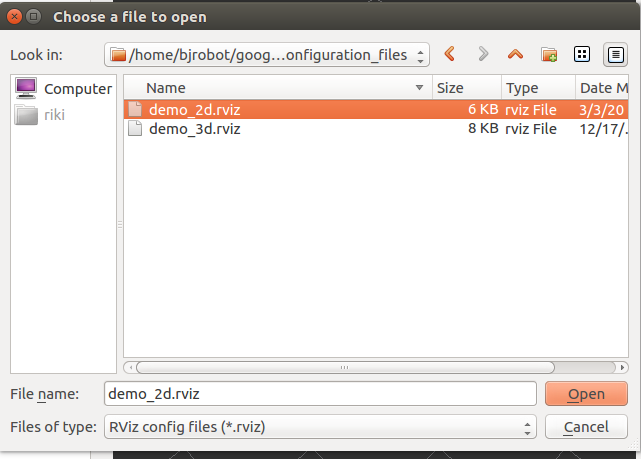
5.全屏化后点击 File,点击 Open Config,
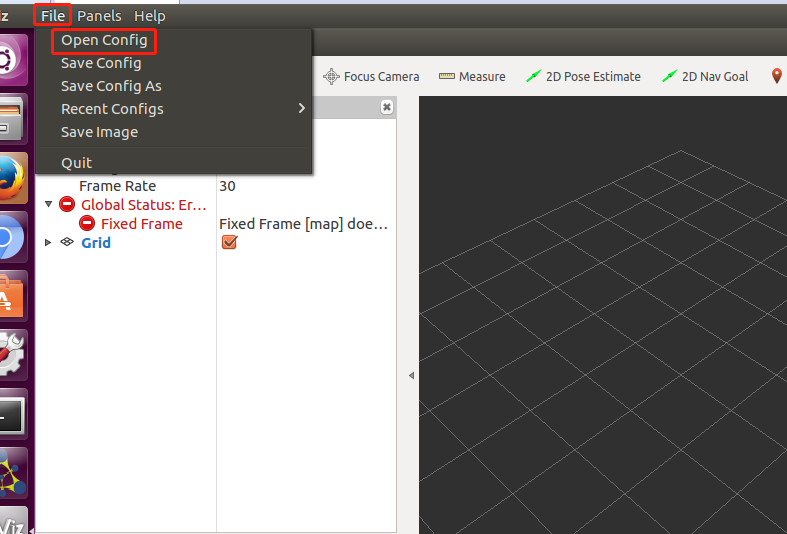
6.找到~/google_ws/install_isolated/share/cartographer_ros/configuration_files/ 路径下,的 demo_2d.rviz 文件。点击 Open。
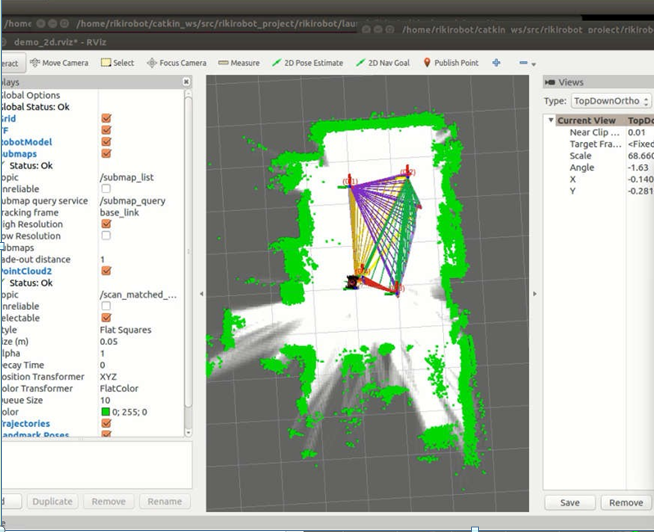
7.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图; 鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。

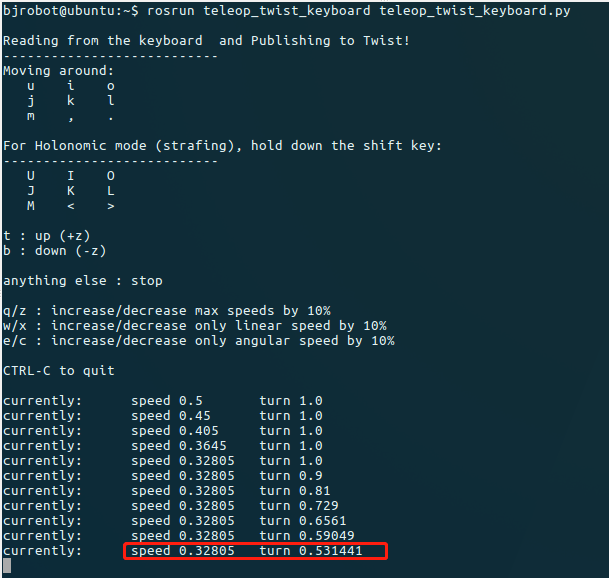
8.在虚拟机端再打开一个终端,直接启动键盘控制 rosrun teleop_twist_keyboard teleop_twist_keyboard.py
把线速度调整到 0.3m/s 左右,把角速度调整到 0.5rad/s 左右。
9.然后用键盘控制小车移动,在该区域内完成扫描建图。
10.在虚拟机端,再打开一个终端,ssh 过去主控端,进入到
~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行 ./cartographer_map.sh 保存地图。
第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
随机推荐
- TextClip的list和search方法报错:UnicodeDecodeError: utf-8 codec canot decode byte 0xb7 in position 8
☞ ░ 前往老猿Python博文目录 ░ 由于moviepy对多语言环境支持存在一些问题,因此在执行TextClip.list('font')和TextClip.search('GB','font') ...
- LeetCode初级算法之数组:48 旋转图像
旋转图像 题目地址:https://leetcode-cn.com/problems/rotate-image/ 给定一个 n × n 的二维矩阵表示一个图像. 将图像顺时针旋转 90 度. 说明: ...
- Scrum冲刺_Day06
一.团队展示: 1.项目:light_note备忘录 2.队名:删库跑路队 3.团队成员 队员(不分先后) 项目角色 黄敦鸿 后端工程师.测试 黄华 后端工程师.测试 黄骏鹏 后端工程师.测试 黄源钦 ...
- x++ 和 ++x的区别
很多编程语言都会有x++和++x的问题,两个到底是怎么回事? 一个先执行一个后执行的区别 var x = 0; console.log(x++);//0 遇到x++当前执行值不变 console.lo ...
- 获取radio的值及重置radio
获取:$('input[name=age]:checked').val(); 重置:$('input:radio[name=age]').prop('checked',false);
- MVC-采用Bundles方式引入css和js文件
优点:修改js或css时会自动生成hash版本号. 缺点:需要在BundleConfig中先添加对应的文件,然后在html中再引用对应的bundle,多操作了一步. web.config中 <c ...
- sql注入之union注入
联合查询注入利用的前提: 必须要有回显 联合查询过程: 判断是否存在注入点 判断是什么类型注入(字符型or数字型) 判断闭合方式 查询列数个数(order by) 5, 获得数据库名 获得表名 获得字 ...
- rpl_semi_sync_master_wait_no_slave 参数研究实验
最近在研究MySQL,刚学到半同步. 半同步的配置中,关于这两个参数: rpl_semi_sync_master_wait_no_slave rpl_semi_sync_master_wait_for ...
- html2canvas使用心得
近两年做了几次微信H5活动的开发,为了达到传播分享的效果,通常最终都需要生成个性化的图片,供用户长按保存分享,在这里就把自己的一些使用心得记录下来,供其他小伙伴借鉴. 这里备注一下,我目前用的是 h ...
- Jmeter +Maven+jenkins+eclipse 接口自动化测试
背景: 首先用jmeter录制或者书写性能测试的脚本,用maven添加相关依赖,把性能测试的代码提交到github,在jenkins配置git下载性能测试的代码,配置运行脚本和测试报告,配置运行失败自 ...