第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch。
2.在虚拟机端启动 roslaunch opencv_apps edge_detection.launch 进行边缘提取采集。
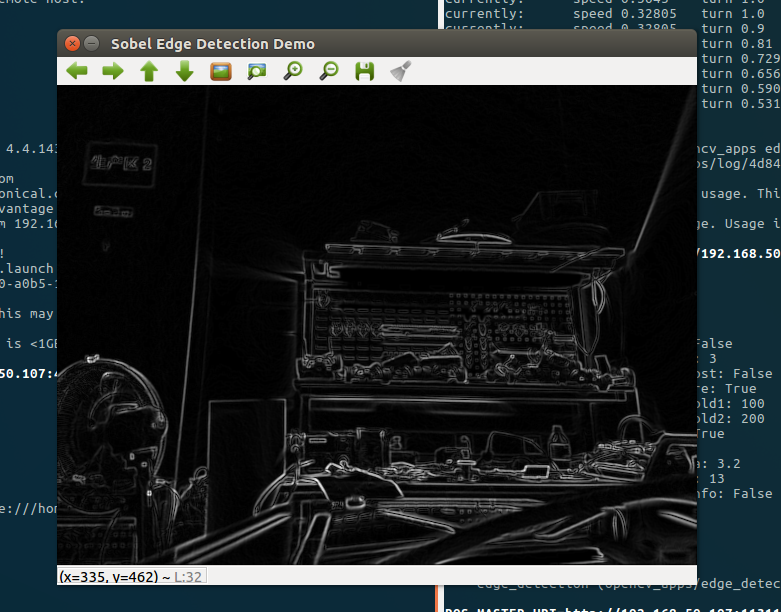
效果如下:
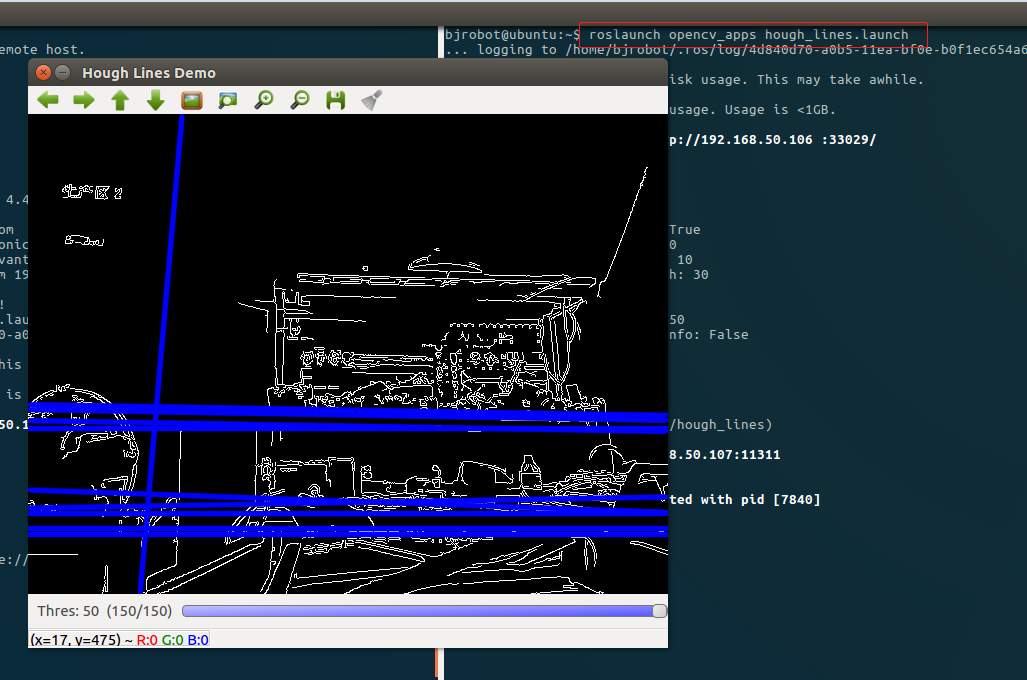
3.在虚拟机端启动 roslaunch opencv_apps hough_lines.launch 进行哈夫变换直线检测。
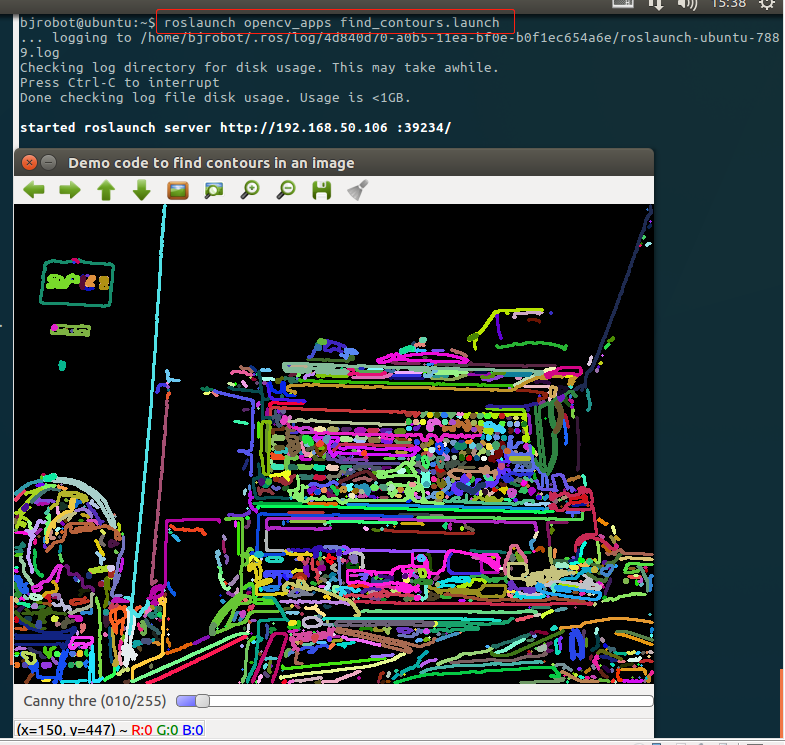
4.在虚拟机端启动 roslaunch opencv_apps find_contours.launch 进行霍夫变换日元检测

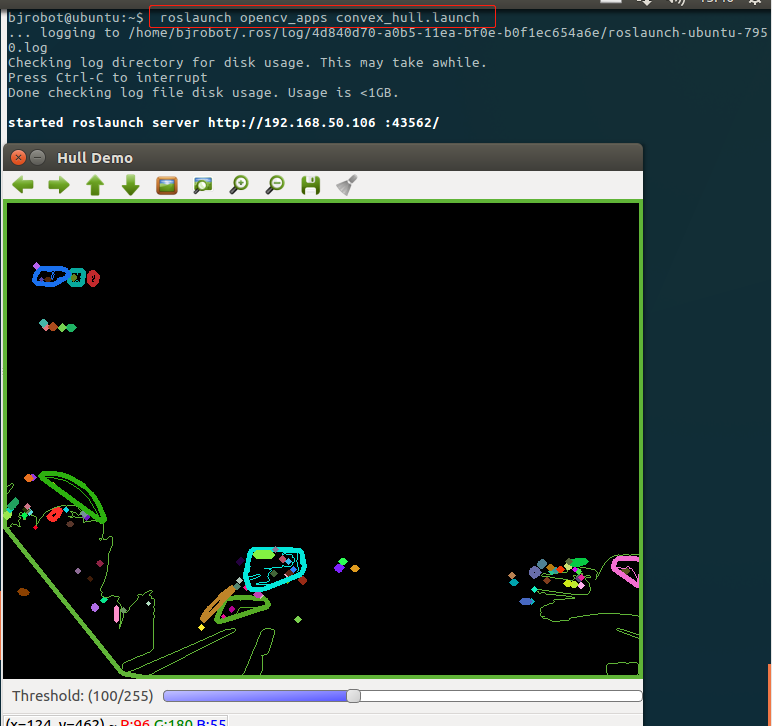
5.虚拟机端启动 roslaunch opencv_apps convex_hull.launch 进行凸包检测
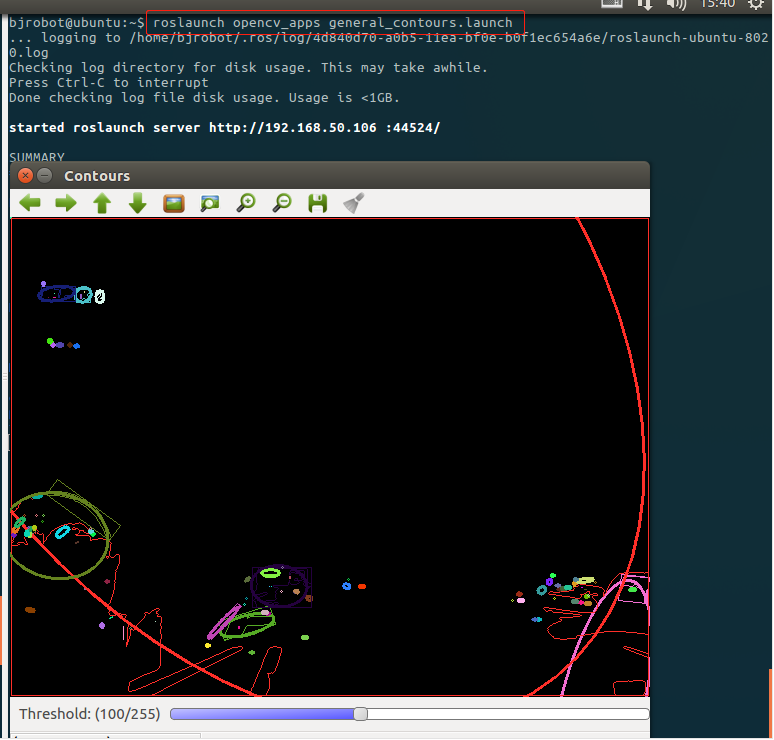
6.在虚拟机端启动 roslaunch opencv_apps general_contours.launch 进行椭圆形检测。
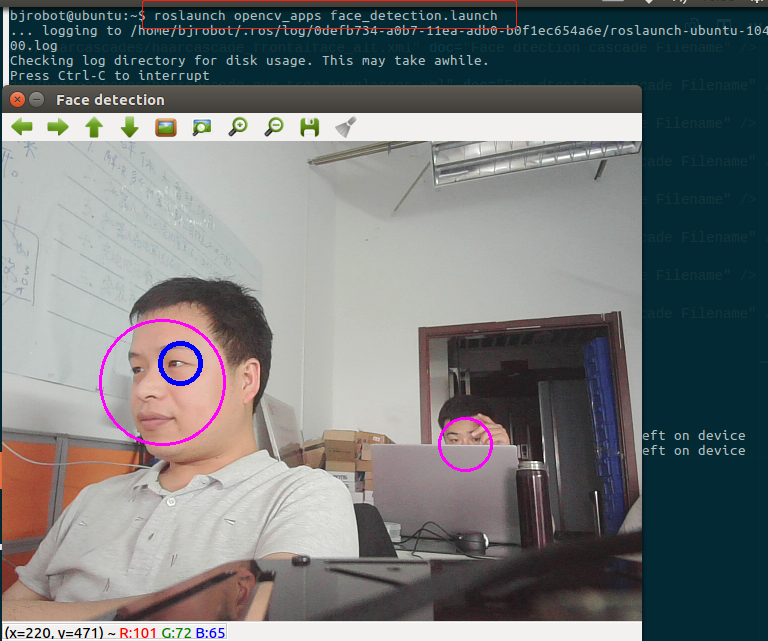
7.在虚拟机端启动 roslaunch opencv_apps face_detection.launch 进行人脸检测
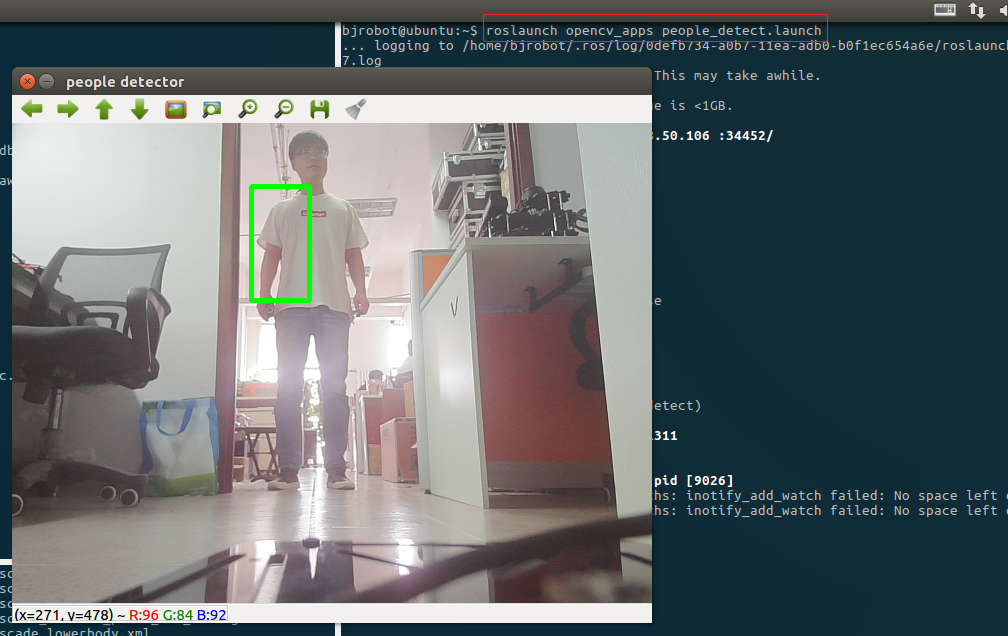
8.在虚拟机端启动 roslaunch opencv_apps people_detect.launch hot 特征量进行人的检测。
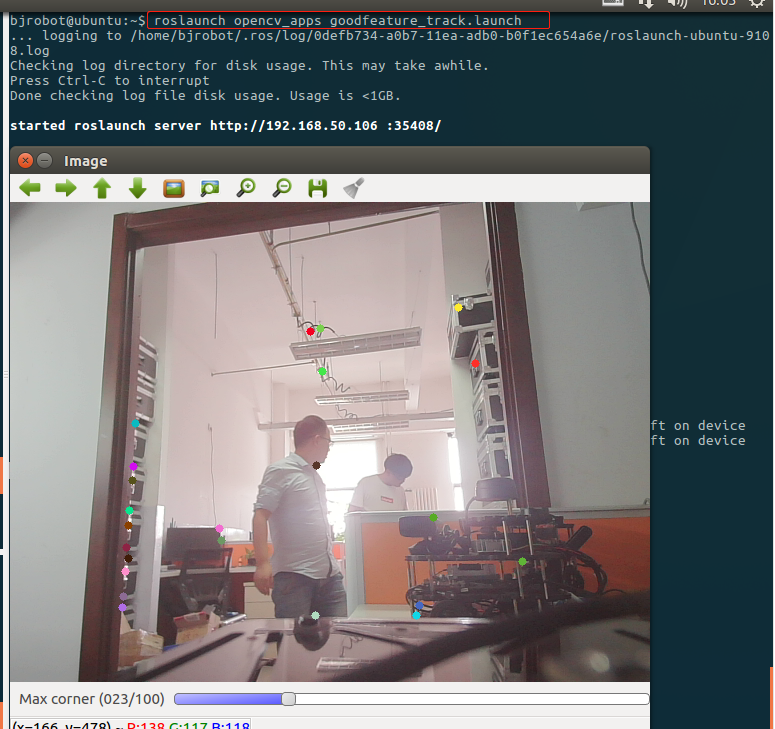
9.在虚拟机端启动 roslaunch opencv_apps goodfeature_track.launch 进行动作特征分析。
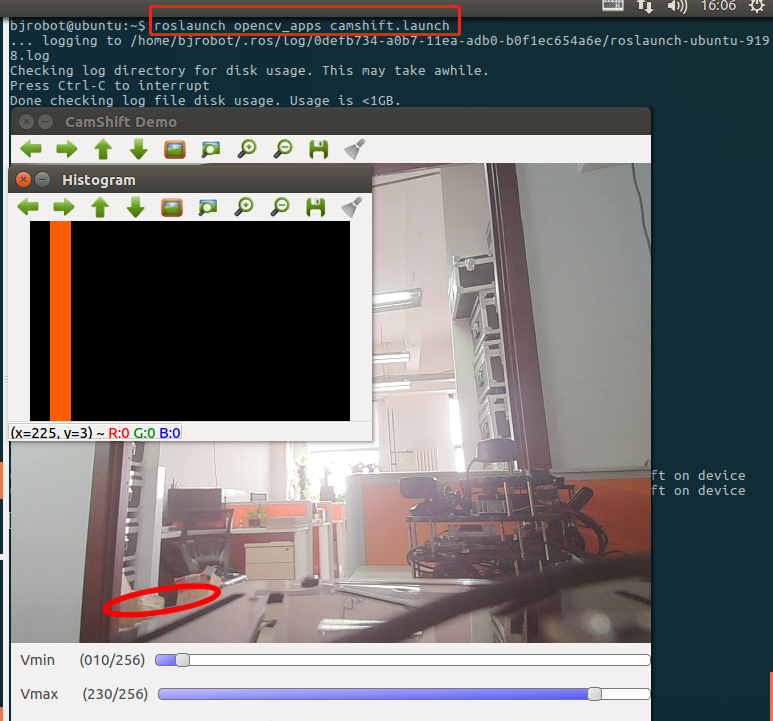
10在虚拟机端启动 roslaunch opencv_apps camshift.launch 进行颜色检测。
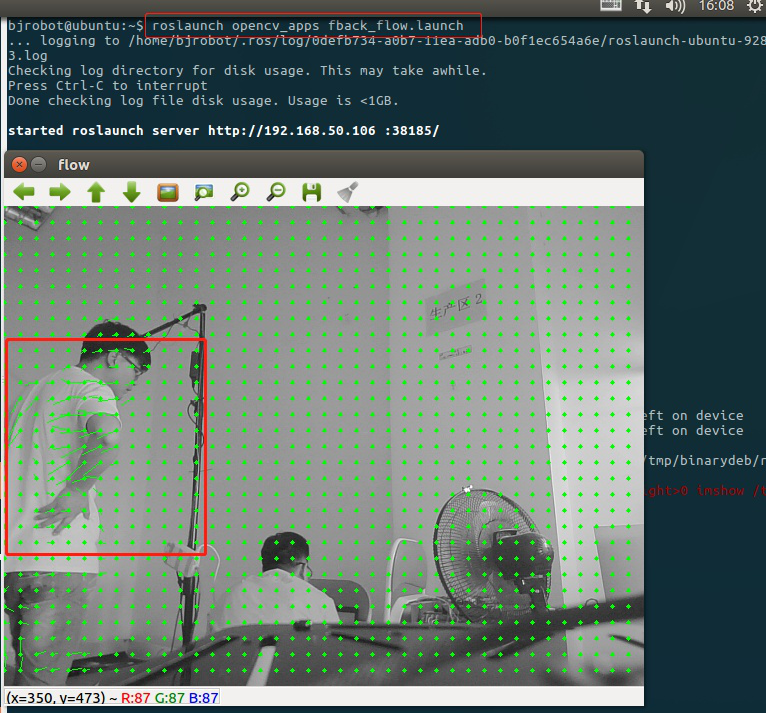
11.在虚拟机端启动roslaunch opencv_apps fback_flow.launch 进行gunnar farneback (optle)检测
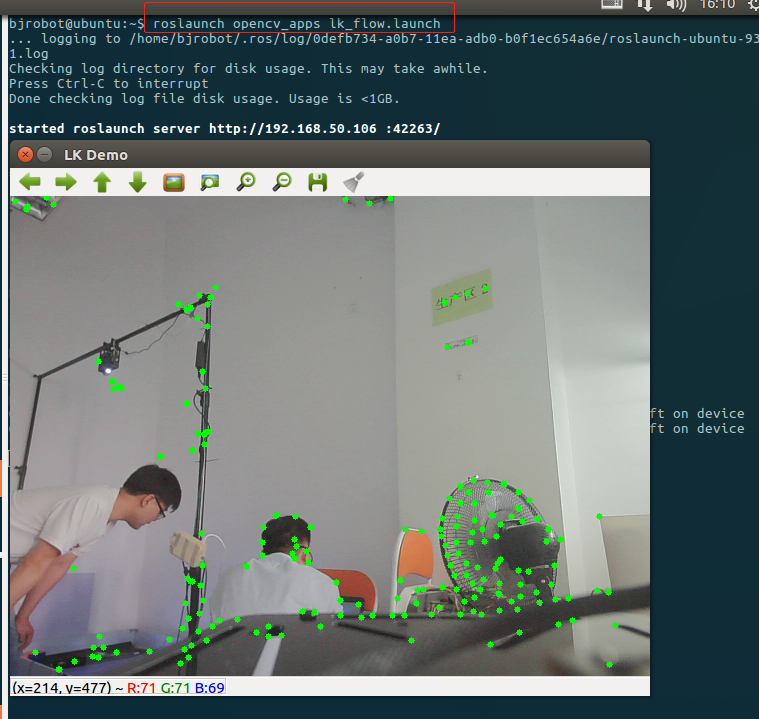
12.在虚拟机端启动 roslaunch opencv_apps lk_flow.launch 进行 lucas- kanade 法的optle 流检测
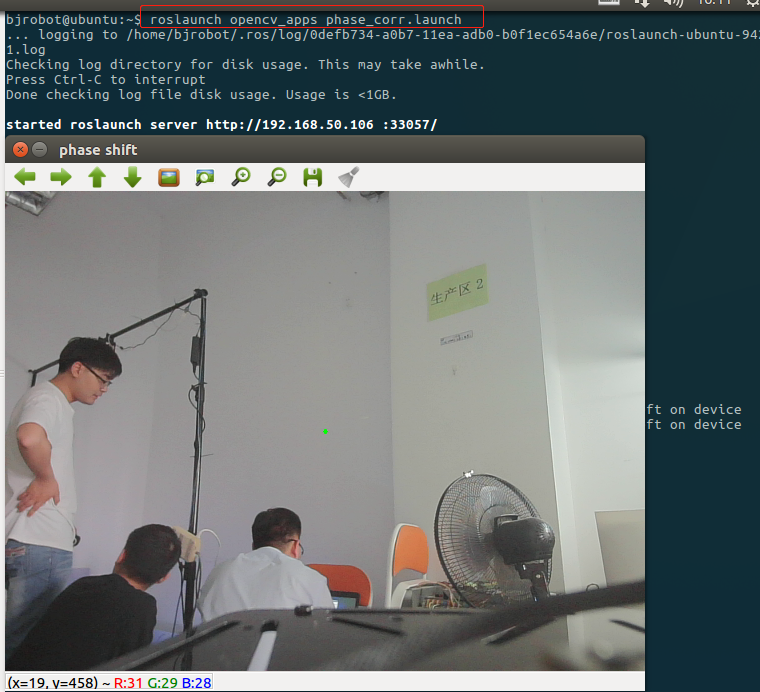
13.在虚拟机端启动 roslaunch opencv_apps phase_corr.launch 进行周波数相位模拟计算。
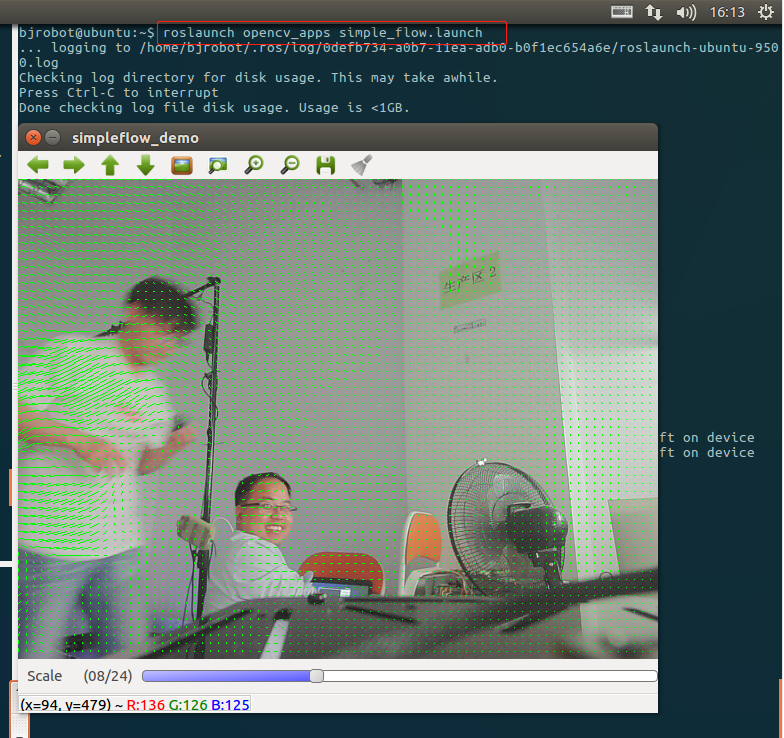
14.在虚拟机端启动 roslaunch opencv_apps simple_flow.launch进行simple_flow 的 opta 流检测
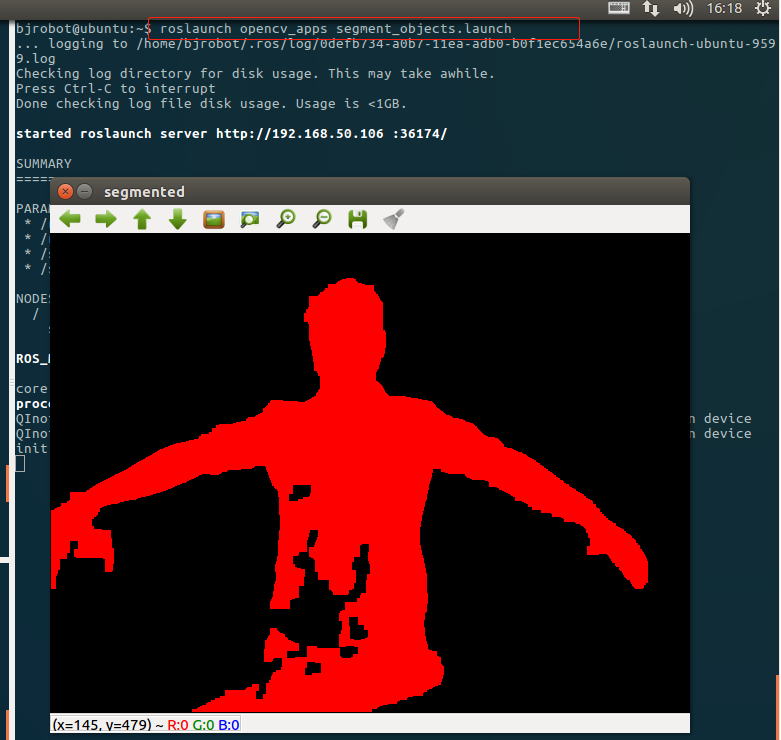
15.在虚拟机端启动 roslaunch opencv_apps segment_objects.launch 进行单一物体的区域分割
16.在虚拟机端启动 roslaunch opencv_apps rgb_color_filter.launch 进行图像过滤。

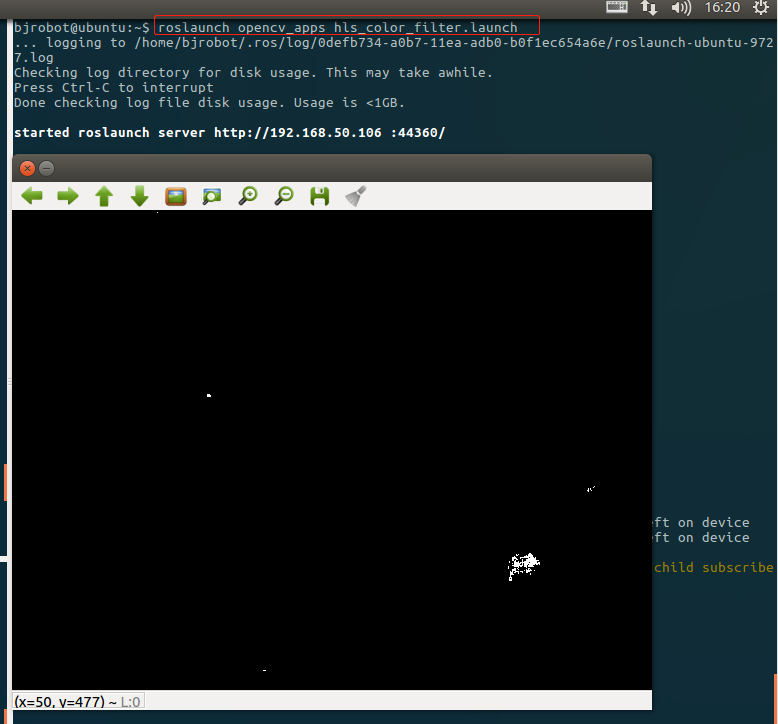
17.在虚拟机端启动 roslaunch opencv_apps hls_color_filter.launch 进行 hls 色特征采集
18.在虚拟机端启动 roslaunch opencv_apps hsv_color_filter.launch 进行 hsv 色特征采集
第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上. 2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁; 3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止. 4.此 ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
随机推荐
- PyQt(Python+Qt)学习随笔:QListView的movement属性
老猿Python博文目录 老猿Python博客地址 QListView的movement属性用于控制在视图中怎么移动数据项,其类型为枚举类型QListView.Movement,有如下取值: Stat ...
- PyQt(Python+Qt)学习随笔:Designer中的QDialogButtonBox的clicked信号参数QAbstractButton *解决办法
一.引言 QDialogButtonBox本身只提供4种信号,分别是accepted.rejected.clicked和helpRequested,在<PyQt(Python+Qt)学习随笔:D ...
- 【.Net Core】开源项目源码--门户网站--精神科医院官网
项目简介 此项目是一个实际开发招投标项目,汕头大学精神卫生中心.一个门户网站,因为没有投标上所以把源码公开出来分享. Github地址: https://github.com/simawenbo12/ ...
- this.$options.data()实战之重置data
刚刚看到这个方法学习了一下,然后想到正在开发的项目有一个需要重置data的操作,正好拿来使用一下,节省了好多代码,美滋滋...
- APIO2020 交换城市
我是真的不稳定的垃圾选手. 对于一张图来说,两个人能满足题面关系等价于这张图不是链,很好证明,如果有度数 \(> 2\) 的点,让一个人跑到一个度数 \(= 1\) 的地方就可以了. 如果离线就 ...
- 【科技】单 $\log$ 合并两棵有交集 FHQ-Treap 的方法
维护可分裂 & 合并的可重集 考虑这样一个问题: 维护 \(n\) 个 可重集 \(S_1, S_2, \cdots, S_n\),元素值域为 \([1, U]\),初始集合为空.支持一下操作 ...
- k8s之yaml文件书写格式
k8s之yaml文件书写格式 1 # yaml格式的pod定义文件完整内容: 2 apiVersion: v1 #必选,版本号,例如v1 3 kind: Pod #必选,Pod 4 metadata: ...
- JVM的艺术—类加载器篇(三)
JVM的艺术-类加载器篇(三) 引言 今天我们继续来深入的剖析类加载器的内容.上篇文章我们讲解了类加载器的双亲委托模型.全盘委托机制.以及类加载器双亲委托模型的优点.缺点等内容,没看过的小伙伴请加关注 ...
- (数据科学学习手札100)搞定matplotlib中的字体设置
本文示例文件已上传至我的Github仓库https://github.com/CNFeffery/DataScienceStudyNotes 1 简介 matplotlib作为数据可视化的利器,被广泛 ...
- uniapp云打包配置讲解
HBuilderX开发工具,菜单栏:发行(U) → 原生App云打包(P) 安卓云打包配置: 云打包配置分为公共测试证书和自有证书. 云打包配置使用公共测试证书很简单,直接勾选后打包. 如果要测试第三 ...