第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch。

2.在虚拟机端打开一个终端,ssh 过去主控端启动roslaunch znjrobot hector_slam.launch。

3.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
4.全屏化后点击 File,点击 Open Config,
5.找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/slam.rviz,的slam.rviz 文件。点 Open。
6.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
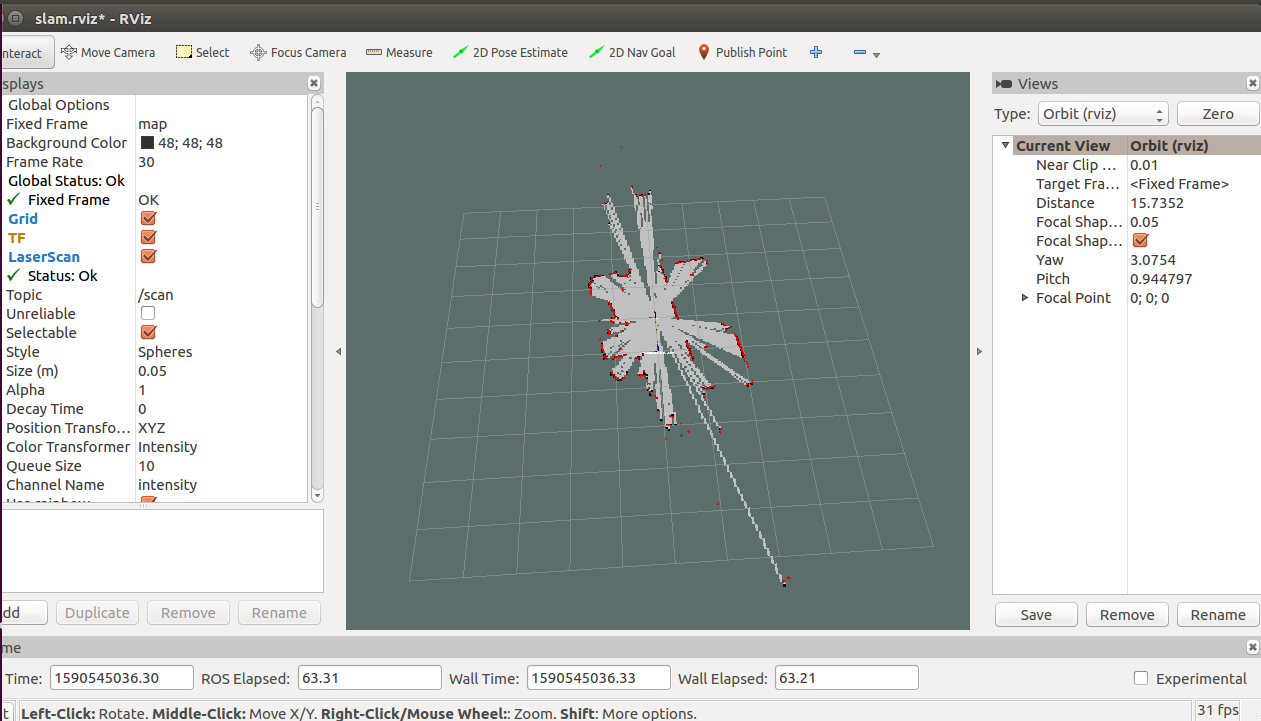
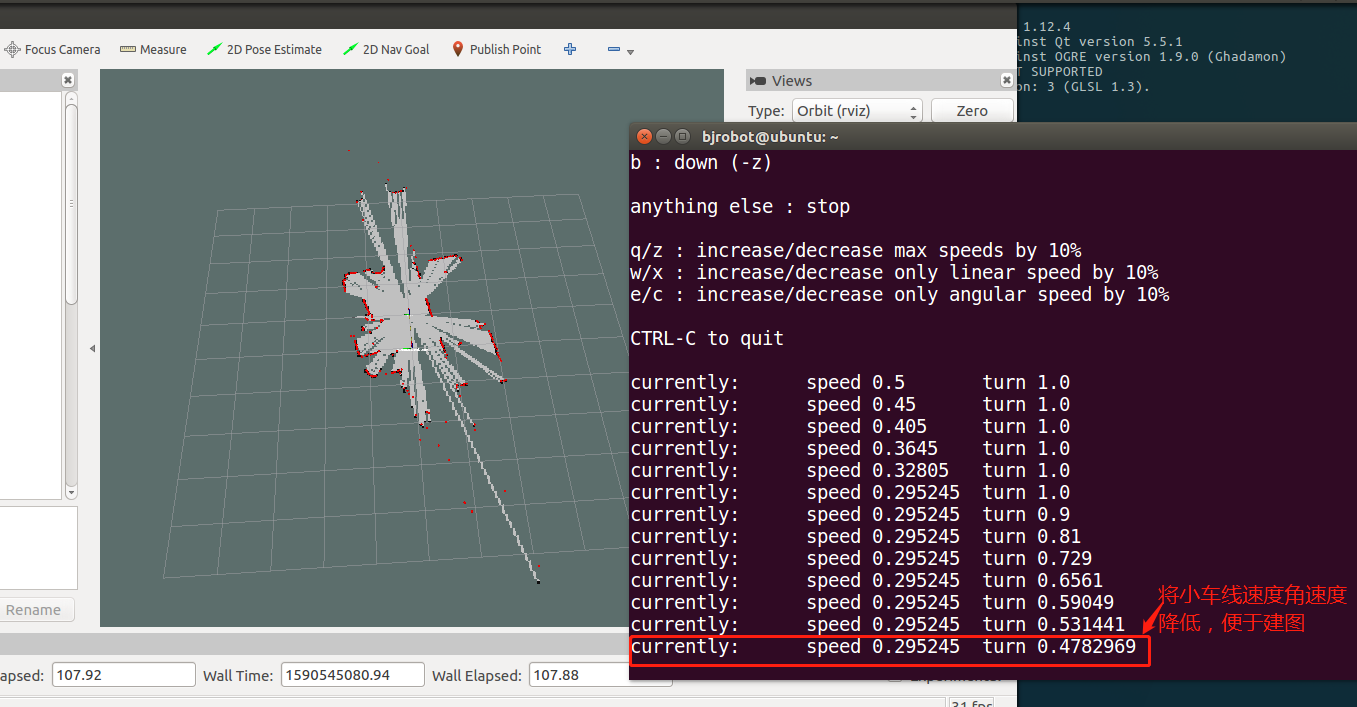
7.在虚拟机端,打开一个终端启动键盘控制,把线速度调整到 0.3m/s 左右,角速度调整到0.5rad/s 左右,对小车进行移动控制,完成地图构建。注意:hector 算法构图对雷达性能要求比较高,如果有条件的建议用多线雷达测试效果会更好。
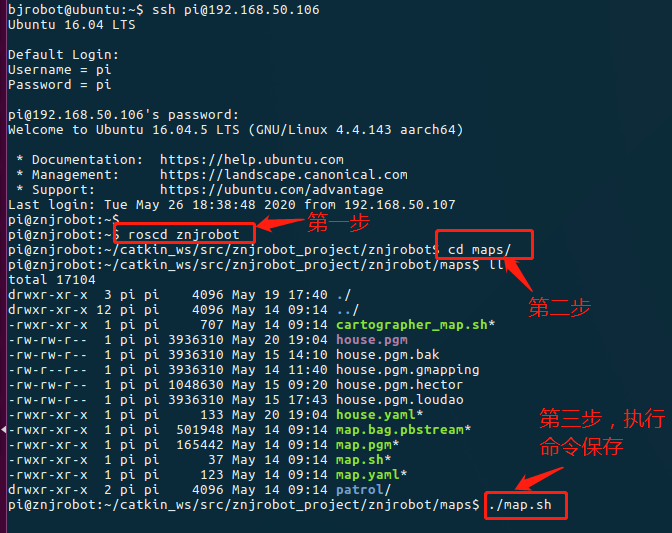
8.当该区域内的地图扫描完毕后,在虚拟机端,再打开一个终端,ssh 过去主控端,进入到~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本,执行保存地图脚本前后可以通过 ll ,查看地图的大小时间等来初步判断地图有无保存成功。
执行完成后,即可查看到在目录下重新生成的house.pgm文件。
第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
随机推荐
- 第四十一章、PyQt显示部件:TextBrowser、CalendarWidget、LCDNumber、ProgressBar、Label、HorizontalLine和VerticalLine简介
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一.概述 在Designer中,显示部件有Labe ...
- MapReduce简单执行过程及Wordcount案例
MapReducer运行过程 以单词统计为案例. 假如现在文件中存在如下内容: aa bb aa cc dd aa 当然,这是小文件,如果文件大小较大时会将文件进行 "切片" ,此 ...
- 手机APP测试(测试点、测试流程、功能测试)
1.功能测试 1.1 启动 APP安装完成后,是否可以正常打开,稳定运行 APP的速度是可以让人接受,切换是否流畅 网络异常时,应用是否会崩溃:在请求超时的情况下,如果程序逻辑处理的不好,就有可能发生 ...
- [ASIS 2019]Unicorn shop
点击进去之后是一个购买独角兽的界面,有四种类型的独角兽,前三种的价格比较便宜,最后的独角兽价格比较贵. 我们先尝试购买前三种独角兽,输入id,然后price输入9 然后就告诉我商品错了,可能复现靶场这 ...
- 5、Spring Cloud Ribbon
1.Ribbon简介 (1).Ribbon介绍 Spring Cloud Ribbon是基于Netflix Ribbon实现的一套客户端负载均衡的工具. Ribbon是Netflix发布的开源项目,主 ...
- C#声明一个100大小的数组 随机生成1-100之间不重复的数
面试题:C#声明一个100大小的数组 随机生成1-100之间不重复的数下面是C#的实现方式,编译测试通过 public static void InsertRandomArray() { int[] ...
- BJOI2017 机动训练
落谷.Loj. Description 定义机动路径为: 没有自环 路径至少包含两个格子 从起点开始每一步都向不远离终点的方向移动 相同地形序列指路径上顺序经过的地形序列. 定义机动路径的权值为相同地 ...
- 题解-CF1139D Steps to One
题面 CF1139D Steps to One 一个数列,每次随机选一个 \([1,m]\) 之间的数加在数列末尾,数列中所有数的 \(\gcd=1\) 时停止,求期望长度 \(\bmod 10^9+ ...
- 关于大视频video播放的问题以及解决方案(m3u8的播放)
在HTML5里,提供了<video>标签,可以直接播放视频,video的使用很简单: <video width="320" height="240&qu ...
- linux下为什么每次修改完配置文件之后都需要重新加载配置文件
目录 一.关于inode 二.inode的作用 二.为什么每次修改完服务器配置文件之后,都需要重新加载一下配置文件? 一.关于inode 1.在linux下一切皆文件,linux文件由三部分组成:文件 ...