第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空。用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。

2.在虚拟机端再打开一个终端,ssh 过去主控端启动rosrun znj_pid pid_configure

3.在虚拟机端再打开一个终端,直接启动 rosrunrqt_reconfigure rqt_reconfigure

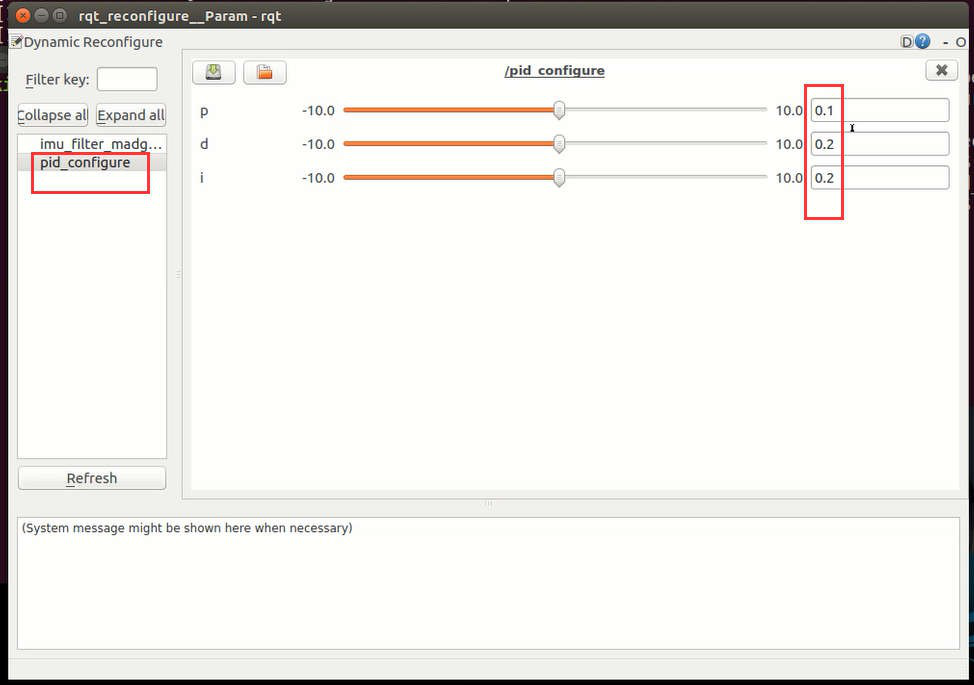
4.在弹出以下窗口,点击左边的 pid_configure,然后我们看到右边有三个数值是0.1,0.2,0.2,分别对应 p,i,d 三个参数的值,这三个值是我们小车配套使用的电机,已经调试好的 pid 值。如果更换过电机后,就要适配该电机比较合适的电机 p,i,d 参数,才能达到比较好的控制电机的效果,调试好的值写在底层驱动板固件里面,上层就是通过此方法快速调试到电机合适的pid 参数。
方法:以 0.1 为单位去增加或者减少 pid 三个参数的值,调整参数,然后虚拟机端启动键盘控制小车,一步步调试,直到找到合适的 pid 参数,参考指标是能让电机缓起缓停,转动平顺等。
第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上. 2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁; 3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止. 4.此 ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
随机推荐
- moviepy音视频剪辑VideoClip类to_mask方法、to_RGB、afx方法
☞ ░ 前往老猿Python博文目录 ░ moviepy音视频剪辑VideoClip类to_mask方法和to_RGB方法用于进行剪辑内容变换. 1.to_mask方法 to_mask方法返回一个由调 ...
- 第9.4节 Python中用readline读取二进制文件方式打开文件
在<第9.3节 Python的文件内容读取:readline>中介绍了使用readline读取文件的处理,readline除了使用文本文件方式打开文件读外,也可以读取二进制方式打开的文件, ...
- 第10.6节 Python包的概念
一. 引言 在<第10.2节 Python的模块及模块导入>介绍了模块的概念及导入的几个关键点,Python中的模块是一个单个的py文件,当我们开发的项目或功能集由多个文件构成时,我们需要 ...
- PyQt(Python+Qt)学习随笔:PyQt界面派生类构造方法中super方法的使用
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 在<第15.7节 PyQt入门学习:PyQt5应用构建详细过程介绍>和订阅专栏<第 ...
- IDM 6.37.8 绿色特别版 (4月4日更新)
Internet Download Manager,全球最流行的下载工具.Internet Download Manager (简称IDM) Windows 平台功能强大的多线程下载工具,国外非常受欢 ...
- 团队作业6(A)-Alpha阶段项目复审
Alpha阶段项目复审 复审团队: 莫政 (3118005067). 卢耀恒(3118005065) . 许梓莹(3218005083). 梁小燕(3218005081).高嘉淳(3118005047 ...
- 使用 swagger 加注解 有的方法显示 有的不显示
在使用swagger 的时候 ,加完注解 运行后发现,有很多加了注解的没有显示,debug 也有返回数据 ,最终发现,有一个方法中有个参数 是Boolean 类型, 但是这个 参数 我没有添加 ...
- 一种使用 Redis 深度驱动的,为构建轻量级分布式应用程序(Microservices)的工程方案
Hydra 是一个轻量级的 NodeJS 库,用于构建分布式计算应用程序,比如微服务.我们对轻量级的定义是:轻处理外部复杂性和基础设施依赖 -- 而不是有限的轻处理. Hydra 声称对基础设施的依赖 ...
- 你必须要知道的HTTP协议原理
1 基本概念 HTTP协议:基于TCP协议之上实现的无状态.全文本的标准通信协议. 客户端:例如pc浏览器,移动应用端,第三方服务器等能发起http访问的设备. 服务器:能够接受HTTP协议请求,并且 ...
- 使用Binlog日志恢复误删的MySQL数据
解到: MySQL的binlog日志是什么?通常是用来干什么的? 模拟一次误删数据的操作,并且使用binlog日志恢复误删的数据. 写这篇文章的初衷,是有一次我真的险些把测试数据库的一张表给删除了,当 ...