第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1、把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 。
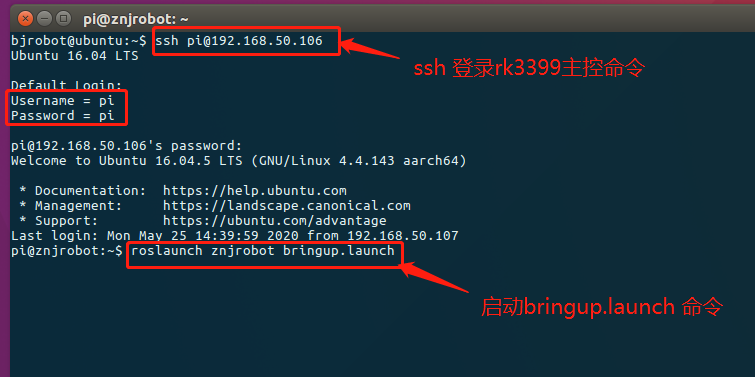
2、再打开一个终端,ssh 过去主控端,在
~/catkin_ws/src/znjrobot_project/znjrobot/param/imu 路径下启动 imu 校正命令。rosrun imu_calib do_calib

3、按提示输入回车即可完成校正。
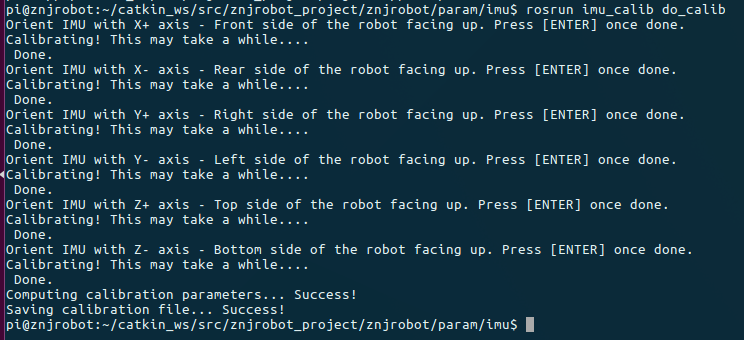
切记:运行imu自动校正,一定要先跳转到~/catkin_ws/src/znjrobot_project/znjrobot/param/imu目录下运行命令;
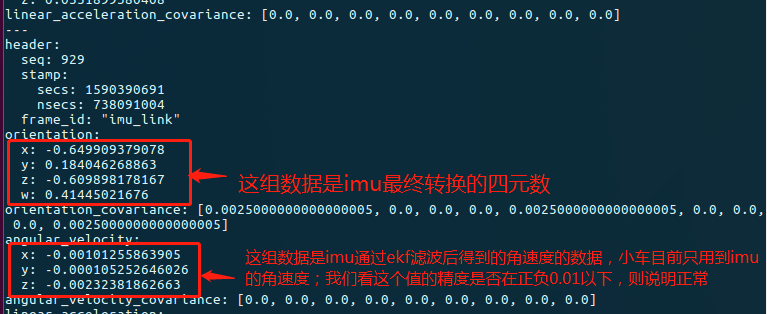
4、校准完成后,测试验证IMU参数是否准确:
需要重新启动bringup文件,让系统重新加载校准后的参数,也就是要关闭以前执行的roslaunch znjrobot bringup.launch命令(tips:Ctrl+C可以关掉当前终端的应用);
再重新开一个终端,执行查看imu话题的命令,执行rostoipc echo /imu/data命令就会出现校准后的IMU数值的界面,由于我们目前只用到IMU的角速度,因此我们看 角速度的的各项指标是不是正常就行:
第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上. 2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁; 3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止. 4.此 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
随机推荐
- 推荐4个Flutter重磅开源项目
早上好,骚年,我是小 G,我的公众号「菜鸟翻身」会推荐 GitHub 上有用的项目,一分钟 get 一个优秀的开源项目,挖掘开源的价值,欢迎关注我. 近年来,随着移动智能设备的快速普及,移动多端统一开 ...
- 第10.4节 Python模块的弱封装机制
一. 引言 Python模块可以为调用者提供模块内成员的访问和调用,但某些情况下, 因为某些成员可能有特殊访问规则等原因,并不适合将模块内所有成员都提供给调用者访问,此时模块可以类似类的封装机制类似的 ...
- PyQt(Python+Qt)学习随笔:QListWidget插入项的insertItem方法
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 在QListWidget对象中,插入一个项的方法是调用insertItem方法,insertItem ...
- CSS全览_选择符+特指+单位+字体
CSS全览_选择符+特指+单位+字体 目录 CSS全览_选择符+特指+单位+字体 1. CSS样式 2. 选择符 3. 特指度和层叠 4. 值和单位 5. 字体 作者: https://www.cnb ...
- hash相关
转译☞:https://www.cs.rice.edu/~as143/COMP441_Spring17/scribe/lect4.pdf 1 大规模图片检索问题 基于树模型的算法在分类跟聚类中很受欢迎 ...
- 题解-Railgun
题面 Railgun \(T\) 组测试数据,每次给定 \(n,k\),求(\(F(i)\) 为斐波那契数列第 \(i\) 项): \[\sum_{1\le x_i\le n(1\le i\le k) ...
- 关于微信NFC功能开发的链接总结
特此申明:若有侵权,请联系我,我会第一时间删除 一. 小程序开发一般流程: 首先调用 wx.getHCEState(OBJECT), 判断设备是否支持NFC,(ios,android兼容性处理) 调用 ...
- 谷歌浏览器debugger技巧
1.Pause/Resume script execution:暂停/恢复脚本执行(程序执行到下一断点停止). 2.Step over next function call:逐步执行. 跳过按钮.它会 ...
- 精尽Spring MVC源码分析 - 调式环境搭建
该系列文档是本人在学习 Spring MVC 的源码过程中总结下来的,可能对读者不太友好,请结合我的源码注释 Spring MVC 源码分析 GitHub 地址 进行阅读 Spring 版本:5.2. ...
- Android 11 源码下载+编译教程
下载AOSP源码 这里我使用的是外国语大学的镜像执行的下载,Mac系统的话,一定要在区分大小姐的磁盘下执行 repo init -u https://mirrors.bfsu.edu.cn/git/A ...