第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU、角速度、线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界、虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!!
1.把小车平放在你想要构建地图的区域内地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
2.在虚拟机端,再打开一个终端,ssh 过去小车主控端启动, roslaunch znjrobot rplidar.launch
3.在虚拟机端,再打开一个终端,ssh 过去小车主控端启动, roslaunch znjrobot cartographer_slam.launch

4.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
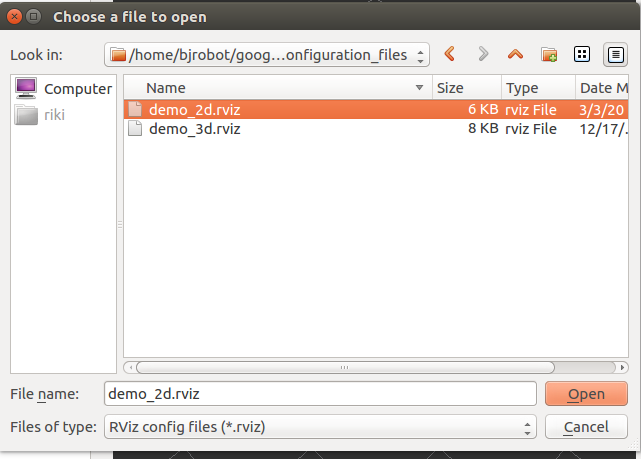
5.全屏化后点击 File,点击 Open Config,
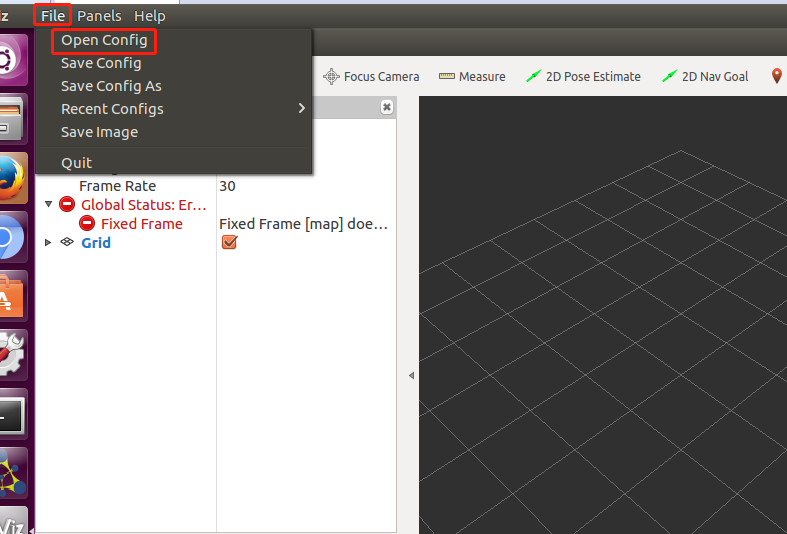
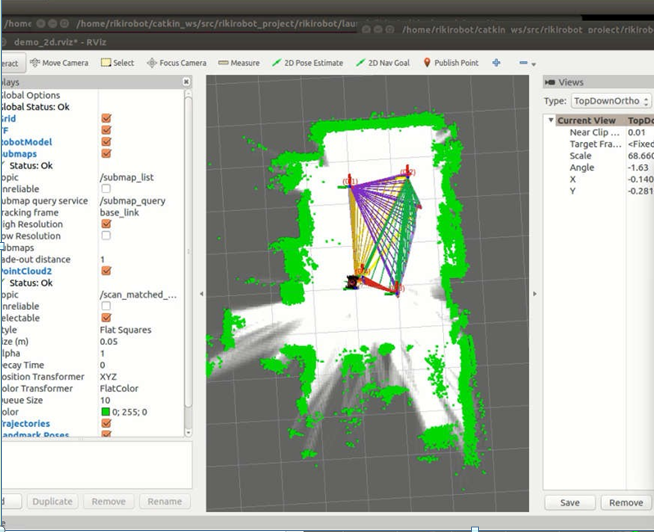
6.找到~/google_ws/install_isolated/share/cartographer_ros/configuration_files/ 路径下,的 demo_2d.rviz 文件。点击 Open。
7.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图; 鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。

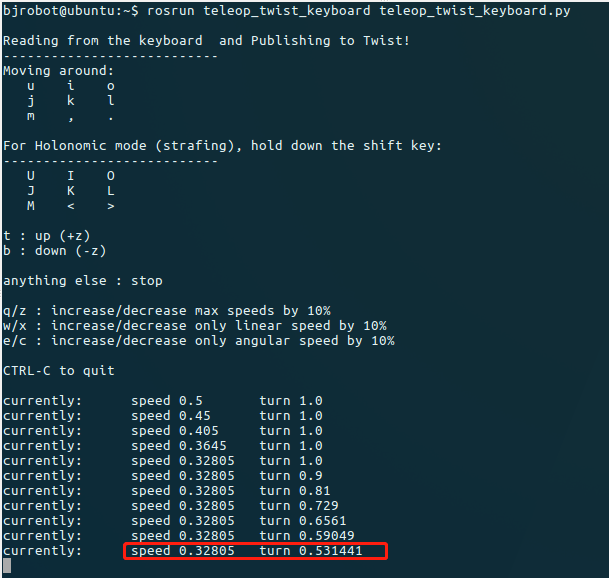
8.在虚拟机端再打开一个终端,直接启动键盘控制 rosrun teleop_twist_keyboard teleop_twist_keyboard.py
把线速度调整到 0.3m/s 左右,把角速度调整到 0.5rad/s 左右。
9.然后用键盘控制小车移动,在该区域内完成扫描建图。
10.在虚拟机端,再打开一个终端,ssh 过去主控端,进入到
~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行 ./cartographer_map.sh 保存地图。
第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
随机推荐
- 并发编程实战-ConcurrentHashMap源码解析
jdk8之前的实现原理 jdk1.7中采用的数据结构是Segment + HashEntry 的方式进行实现.主要的结构如下图: ConcurrentHashMap 并不是将每个方法都在同一个锁上同步 ...
- 项目使用RQ队列的思考
碎遮项目的后端异步处理经历了 无处理->多线程/多进程->celery异步队列->RQ队列 的调整和修改,先简单说明一下为什么会存在这样的过程. 在nmap的使用指南中,提到过这样的 ...
- ActionResult的返回类型
ActionResult是控制器方法执行后返回的结果类型,控制器方法可以返回一个直接或间接从ActionResult抽象类继承的类型,如果返回的是非ActionResult类型,控制器将会将结果转换为 ...
- bootstrap 扩展参数
后台接受的参数形式 前端加载bootstrap时做的处理
- 01_02_py
1基础知识 1.自然语言 (natural language) 是人们交流所使用的语言,例如英语.西班牙语和法语.它们不是人为设计出来的(尽管有人试图这样做):而是自然演变而来. 2.形式语言 (fo ...
- 前端删除多条数据,如何将多个被删除项指定key传给后台
实际情景: 前端需要移除多个用户,这时需要根据每个用户id进行批量删除操作 前端操作: 1. 拿到所有被操作用户的信息存入数组, 例如 userlist = [user1, user2, user3] ...
- Linux杂谈: gcc对结构体大小的默认处理方式
1. 发现问题 最近在编写代码过程中发现,对一个结构体进行 sizeof 操作时,有时候大小是填充过的,有时候又没有填充. 那么,如果在代码中没有显示的指定要求编译器进行对齐时,gcc的默认处理是怎样 ...
- SpringCloud 源码系列(4)—— 负载均衡 Ribbon
一.负载均衡 1.RestTemplate 在研究 eureka 源码上篇中,我们在 demo-consumer 消费者服务中定义了用 @LoadBalanced 标记的 RestTemplate,然 ...
- iNeuOS工业互联平台,图表与数据点组合成新组件,进行项目复用
目 录 1. 概述... 1 2. 演示信息... 2 3. 应用过程... 2 1. 概述 针对有些行业的数据已经形成了标准化的建模或者有些公司专注于某 ...
- ceph存储集群的应用
1.ceph存储集群的访问接口 1.1ceph块设备接口(RBD) ceph块设备,也称为RADOS块设备(简称RBD),是一种基于RADOS存储系统支持超配(thin-provisioned). ...