第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch
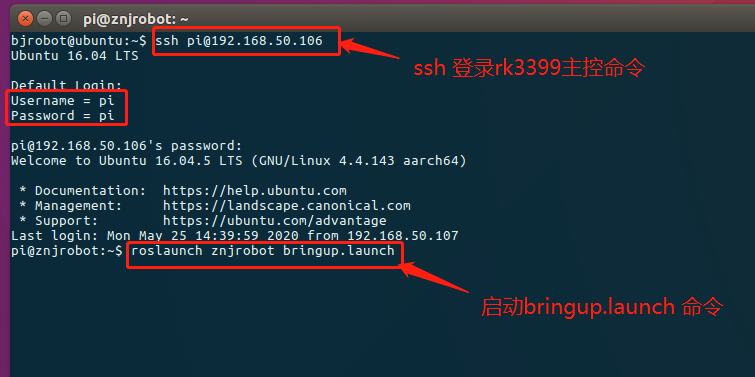
2.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot auto_slam.launch
3.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
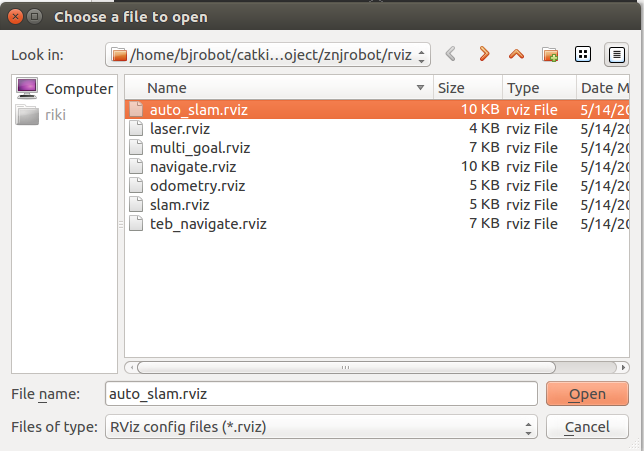
4.全屏化后点击 File,点击 Open Config,

5.找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/auto_slam.rviz,的auto_slam.rviz 文件。点 Open。
6.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图; 鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。

7.用 publish point 在地图上打点,注意打点的位置尽量在雷达扫描的边界以内。
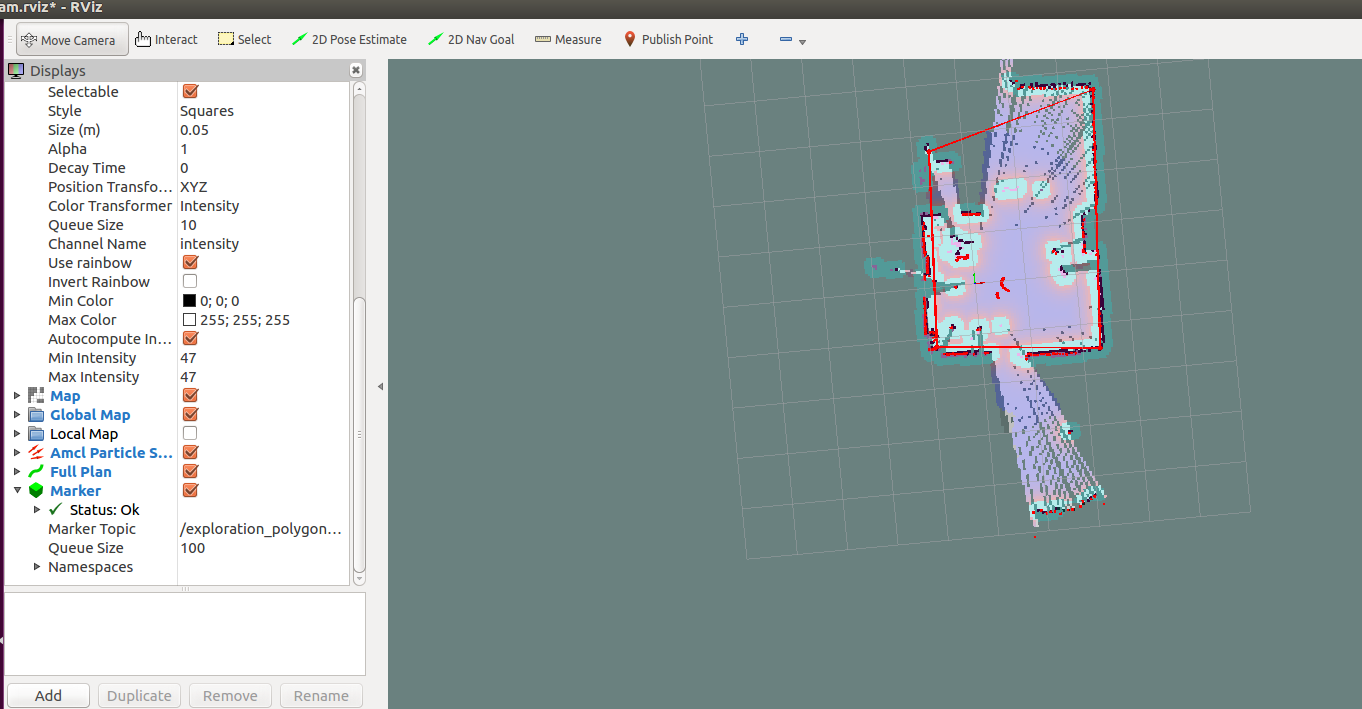
8.如下图所示一共打了 5 个点形成一个封闭图形,最后第 6 个点,点击 publish point 后,在封闭图形内,用鼠标左键点击一下即可。

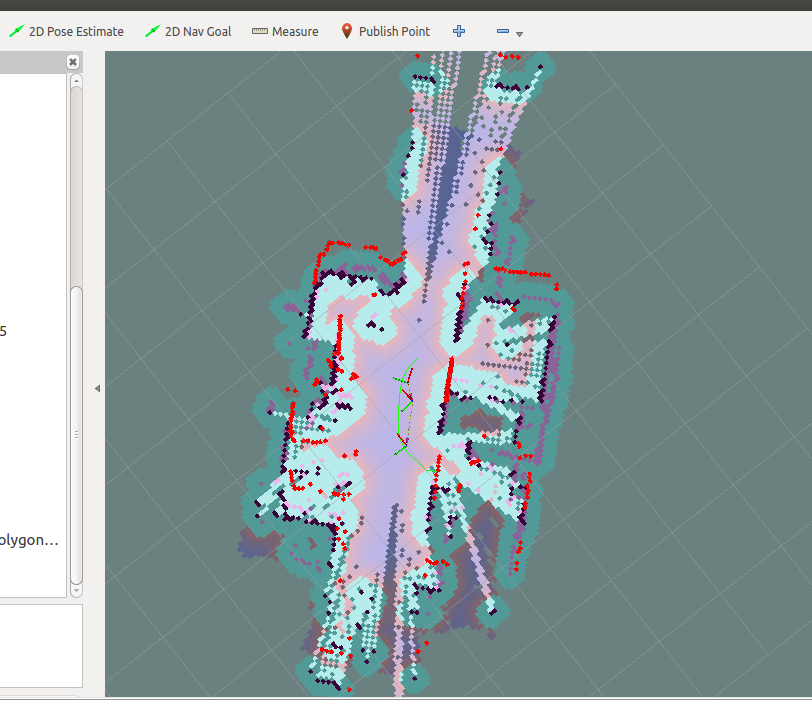
9.此时观察小车,小车通过算法进行路径规划,在你地图打点内的区域内计算行走路径,完成扫描建图。
10.当该区域内的地图扫描完毕后,在虚拟机端,再打开一个终端,ssh 过去主控端,进入到~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本, 执行保存地图脚本前后可以通过ll ,查看地图的大小时间等来初步判断地图有无保存成功。
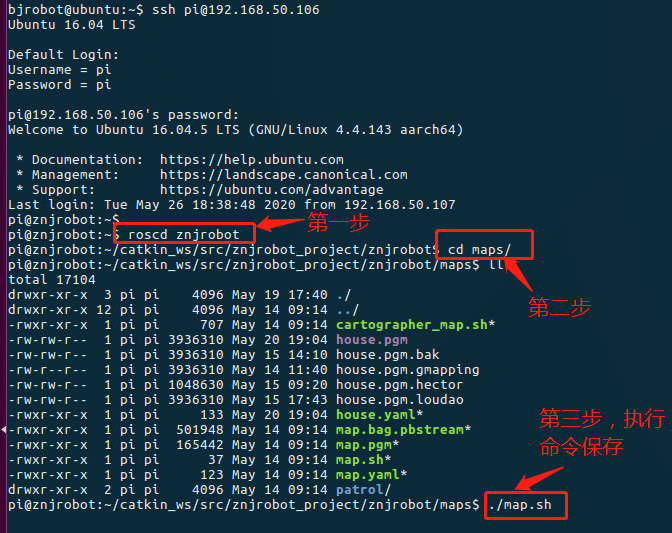
执行完成后,即可查看到在目录下重新生成的house.pgm文件。
第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
随机推荐
- ADF 第一篇:Azure Data Factory介绍
Azure Data Factory(简写 ADF)是Azure的云ETL服务,简单的说,就是云上的SSIS.ADF是基于云的ETL,用于数据集成和数据转换,不需要代码,直接通过UI(code-fre ...
- [SWPU2019]Web1 空格过滤用/**/ 注释过滤闭合单引号 imformation_schema.columns/tables过滤 用5.7新特性 或无名注入(此处database()不能用)
0x00 知识点 二次注入流程分析 二次注入漏洞在CTF中常见于留言板和注册登录功能,简单来说可以分为两个步骤: 插入恶意数据(发布帖子,注册账号),用mysql_escape_string()函数对 ...
- 团队作业6(A)-Alpha阶段项目复审
Alpha阶段项目复审 复审团队: 莫政 (3118005067). 卢耀恒(3118005065) . 许梓莹(3218005083). 梁小燕(3218005081).高嘉淳(3118005047 ...
- 大白话详解大数据hive知识点,老刘真的很用心(1)
前言:老刘不敢说写的有多好,但敢保证尽量用大白话把自己复习的知识点详细解释出来,拒绝资料上的生搬硬套,做到有自己的了解! 01 hive知识点(1) 第1点:数据仓库的概念 由于hive它是基于had ...
- luogu P6835 概率DP 期望
luogu P6835 概率DP 期望 洛谷 P6835 原题链接 题意 n + 1个节点,第i个节点都有指向i + 1的一条单向路,现在给他们添加m条边,每条边都从一个节点指向小于等于自己的一个节点 ...
- [Python] 快速爬取当前城市所有租房网站房源及配置,一目了然
Python爬取当前城市房源信息,以徐州为例代码效果图请看下方,其他部分请查看附件,一起学习,谢谢 # -*- coding: utf-8 -*- """ @Time : ...
- Java 8 新特性——实践篇
Java 8 新特性--实践篇 参考 Java8新特性 重要更新:Lambda 表达式和Stream API Lambda 表达式 Lambda 表达式引入之前: 举个场景例子:当我们要对一个班级里的 ...
- Excel优雅导出
流程 原来写过一篇文章,是介绍EasyExcel的,但是现在有些业务需要解决,流程如下 1.需要把导出条件转换成中文并存入数据库 2.需要分页导出 3.需要上传FTP或者以后上传OSS 解决方案 大体 ...
- tp5使用PHPExcel(下载引入/composer与模板/生成方式搭配使用)
PHPExcel使用 一:引入 tp5.0,tp5.1: 1:composer方式 a:根目录下执行:composer require phpoffice/phpexcel b:引入(可new \PH ...
- HBase按照行键范围删除数据
#!/bin/bash #TOOL_PATH=$(cd "$(dirname "$0")"; pwd) #TOOL_PATH_TMP=$(cd "$( ...