TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板
1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可:

2) 下载后打开,键入Turbot3的ip à回车à选择连接:

3) 登录后,电脑端显示的控制画面,即可进行操作。
4) 打开Ubuntu,这样就可以同时控制两端:
4.2. IP的配置
4.2.1.获取Remote PC和Turbot3的IP
首先获取Remote PC端和Turbot3端的IP
$ ifconfig

键入命令后回车à获取IP
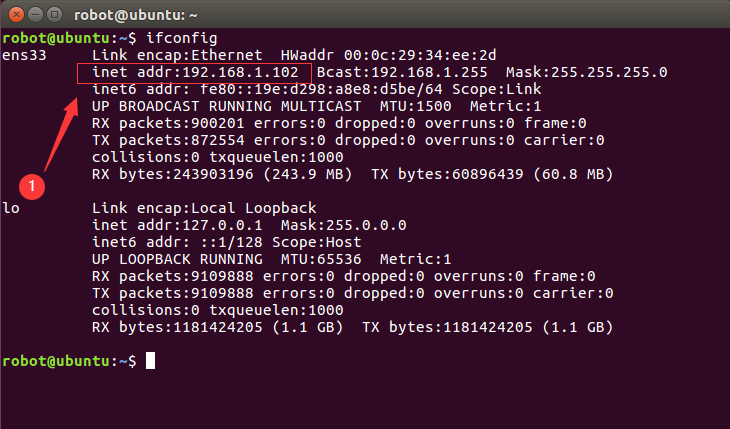
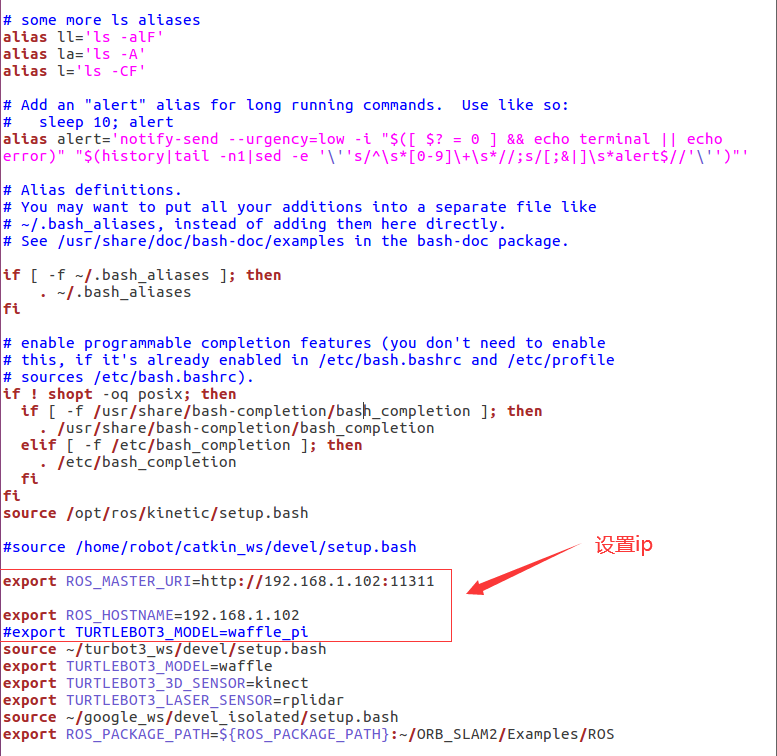
如上图获取的Remote PC的IP为:192.168.1.102
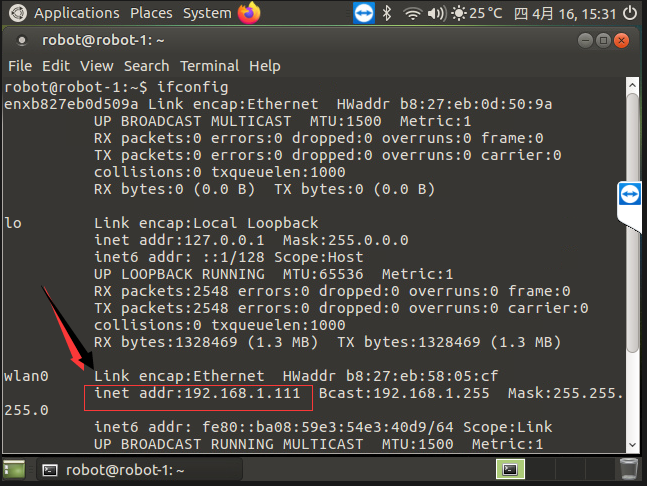
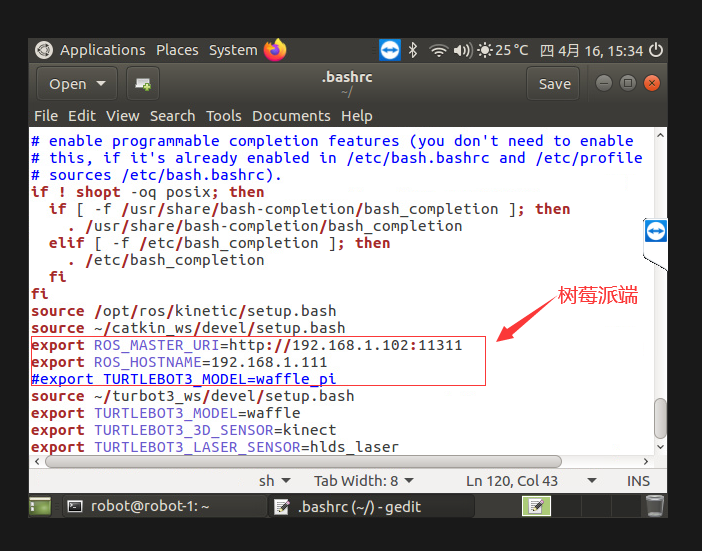
获取的Turbot3的IP为:192.168.1.111
4.2.2.修改Remote PC和Turbot3的IP
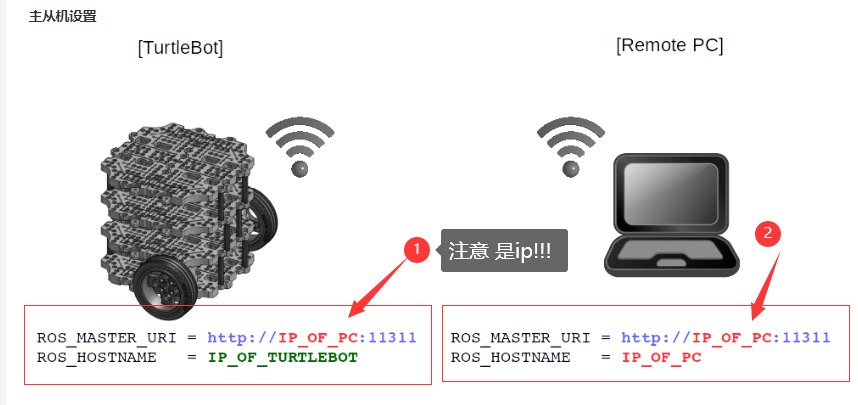
修改IP的命令为:
$ gedit ~/.bashrc
4.2.3.保存Remote PC和Turbot3端的修改
[Turbot3 && Remote PC] 让环境生效,配置的命令为:
$ source ~/.bashrc
4.3.通信测试
[Remote PC]端键入命令,启动roscore
$ roscore

[Turbot3]端键入通信命令(查看是否订阅到主机发布的话题):
$ rostopic list
出现上图,及说明通信成功。
TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信的更多相关文章
- TurtleBot3 Waffle (tx2版华夫)(2)系统安装
Tx2系统默认是安装好的,由于镜像文件大于20G,无法上传百度网盘,所以如有需要请联系我们客服:下面主要是操作步骤: 2.1.准备工作 a.准备好利用Jetpack刷过机的Ubuntu的主机(HOST ...
- TurtleBot3 Waffle (tx2版华夫)(1)笔记本上安装虚拟机、 Ubuntu 系统
1.1虚拟机的安装 1.1.1.windows7系统建议安装14.1版本 VMware workstation 百度云链接: 链接:https://pan.baidu.com/s/1q6Lh9fMuX ...
- TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明 这一节我们来讲 Turtlebot3 的 SLAMSLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知 ...
- TurtleBot3 Waffle (tx2版华夫)(13)RC100遥控杆控制
13.1.遥控器说明 使用ROBOTIS RC100的设置已经在ROS的OpenCR固件中,因此不需要安装必需软件包, 安装号即可使用. 13.2.遥控器的安装 1接线口穿过后壳的过孔. 2接线口连接 ...
- TurtleBot3 Waffle (tx2版华夫)(12)建图-hector建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(11)建图-karto建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(8)键盘控制
1)[Remote PC] 启动roscore $ roscore 2)[Turbot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(7)底盘测试
说明:opencr本身带有自测底盘功能,通过按opencr的sw1和sw2来自检底盘是否正确安装和运行: 7.1.前进测试 1)测试前,先把小车架空,轮子不要着地: 2)接好电源后,打开opencr的 ...
随机推荐
- moviepy音视频剪辑:输出文件前预览剪辑和视频帧的preview和imdisplay方法
☞ ░ 前往老猿Python博文目录 ░ 一.引言 由于moviepy合成剪辑后,输出需要较多的时间,那么在输出前预览一下有助于提高处理效率.moviepy提供了预览的工具,这个工具是基于pygame ...
- Python中sort、sorted的cmp参数废弃之后使用__lt__支持复杂比较的方法
Python2.1以前的排序比较方法只提供一个cmp比较函数参数,没有__lt__等6个富比较方法, Python 2.1引入了富比较方法,Python3.4之后作废了cmp参数.相应地从Python ...
- PyQt(Python+Qt)学习随笔:Qt Designer中部件的快捷菜单策略(contextMenuPolicy)取值及含义
在Qt Designer中可以设置部件的快捷菜单策略,快捷菜单通过在部件上点击鼠标右键触发. 快捷菜单策略通过枚举类型Qt.ContextMenuPolicy来定义,对应枚举类型取值及含义如下: 通过 ...
- PyQt(Python+Qt)学习随笔:toolButton的autoRaise和arrowType属性
autoRaise属性 autoRaise属性表示toolButton按钮是否自动凸出,类型为布尔类型.默认值为False,可以通过autoRaise().setAutoRaise(bool enab ...
- 对flask的学习
任务需求:一个登录,注册页面 任务环境:pycharm 2018 专业版,python3.7,win 10专业版 ------------------------------------------- ...
- NOI 2020 D1T3 本人题解
我看了出题人本题的做法,感觉很难写,就自己胡了一个\(O((n + m) \sqrt n)\)的做法. 第一步我的想法与出题人一样,都是考虑容斥降维.对第\(i\)组询问,我们枚举两个事件中较大的一个 ...
- 题解-CF348E Pilgrims
题面 CF348E Pilgrims 有一棵 \(n\) 个点的 带权 树和 \(m\) 个关键点,要求杀了一个不关键的点,满足最多的关键点到离它最远的所有关键点的路径都被打断.求可以满足的最多关键点 ...
- JavaScript:记录一些字符串和数组常用的方法
字符串: 字符串的方法:注意:都不会改变原来的字符串,返回值为新的字符串.如果(1,2),一般是包含小标1,不包含下标2 str.charAt(i): 取str的第i+1个字符,类似数组的arr[i] ...
- 精尽Spring MVC源码分析 - WebApplicationContext 容器的初始化
该系列文档是本人在学习 Spring MVC 的源码过程中总结下来的,可能对读者不太友好,请结合我的源码注释 Spring MVC 源码分析 GitHub 地址 进行阅读 Spring 版本:5.2. ...
- 细品 Spring Boot+Thymeleaf,还有这么多好玩的细节!
@ 目录 1. Thymeleaf 简介 2. 整合 Spring Boot 2.1 基本用法 2.2 手动渲染 3. Thymeleaf 细节 3.1 标准表达式语法 3.1.1 简单表达式 3.1 ...