TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)
1)[Remote PC] 启动roscore
$ roscore
2)[TurBot3] 启动turbot3
$ roslaunch turbot3_bringup minimal.launch
3)[TurBot3] 启动导航
$ roslaunch turbot3_navigation navigation_laser.launch map_file:=$HOME/map.yaml
4)[Remote PC] 启动Rviz
$ roslaunch turbot3_rviz navigation_rviz.launch
5)在开始导航之前,Turbot3应该知道它的位置和姿势
要给出初始数据,请按照说明进行操作
点击2D Pose Estimate按钮
通过单击并拖动地图上的方向来设置地图上的大致位置。
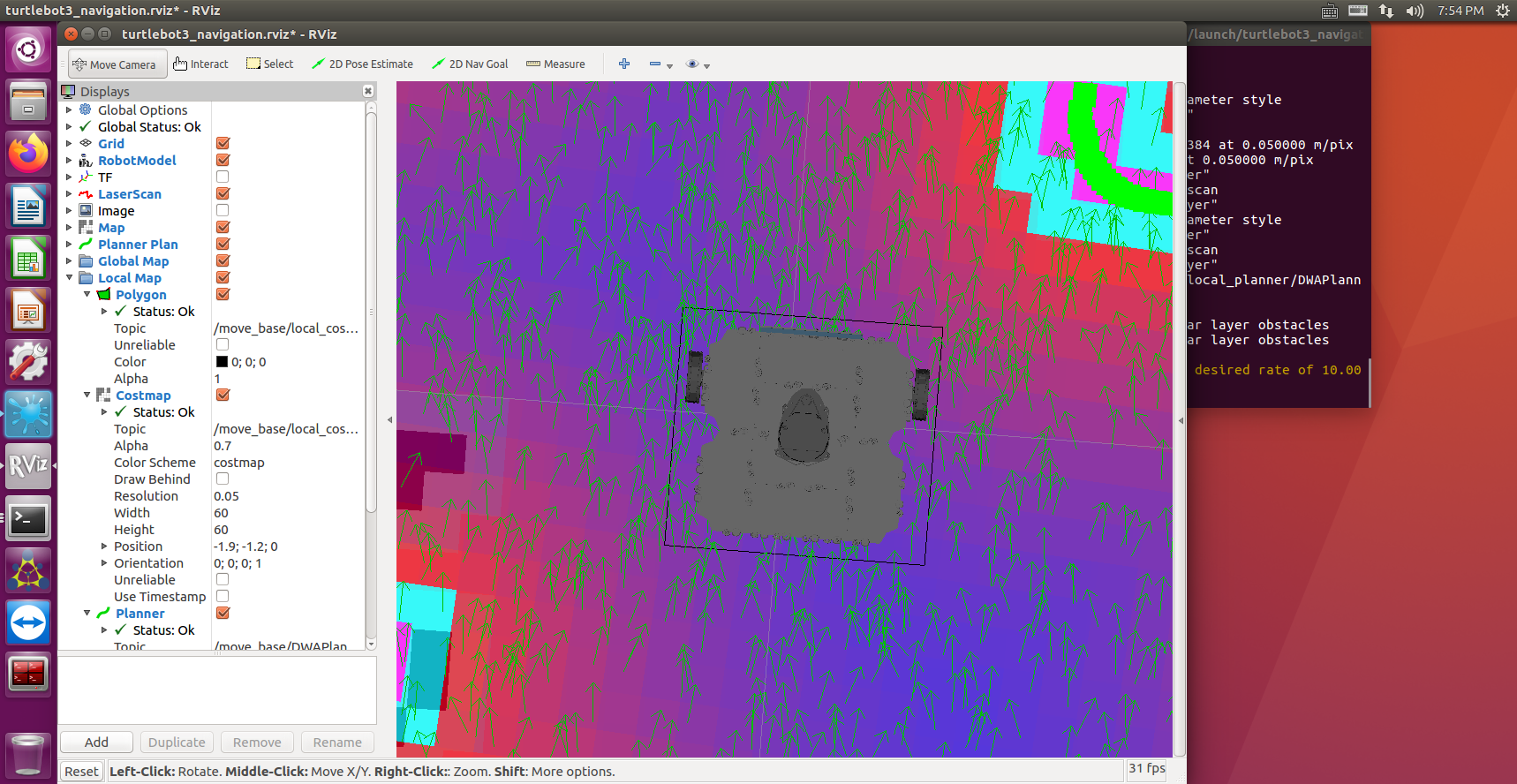
箭头的每个点意味着Turbot3的预期姿势。激光扫描仪将在近似位置绘制线条,如地图上的墙壁
如果图形没有显示线条,请重复上述过程

当Turbot3已经定位,它将自动计划路径
要发送目标位置:
点击 2D Nav Goal按钮
点击地图上你想要的TurtleBot驱动和拖动方向Turbot3应该指向地方
如果目标位置的路径被阻止,这可能会失败。
要在机器人到达目标位置之前停止机器人,请发送Turbot3的当前位
TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)的更多相关文章
- TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板 1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可: 2) 下载后打开,键入Turbot3的ip à回车à选择连接: 3) ...
- TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明 这一节我们来讲 Turtlebot3 的 SLAMSLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知 ...
- TurtleBot3 Waffle (tx2版华夫)(2)系统安装
Tx2系统默认是安装好的,由于镜像文件大于20G,无法上传百度网盘,所以如有需要请联系我们客服:下面主要是操作步骤: 2.1.准备工作 a.准备好利用Jetpack刷过机的Ubuntu的主机(HOST ...
- TurtleBot3 Waffle (tx2版华夫)(13)RC100遥控杆控制
13.1.遥控器说明 使用ROBOTIS RC100的设置已经在ROS的OpenCR固件中,因此不需要安装必需软件包, 安装号即可使用. 13.2.遥控器的安装 1接线口穿过后壳的过孔. 2接线口连接 ...
- TurtleBot3 Waffle (tx2版华夫)(12)建图-hector建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(11)建图-karto建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(8)键盘控制
1)[Remote PC] 启动roscore $ roscore 2)[Turbot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(7)底盘测试
说明:opencr本身带有自测底盘功能,通过按opencr的sw1和sw2来自检底盘是否正确安装和运行: 7.1.前进测试 1)测试前,先把小车架空,轮子不要着地: 2)接好电源后,打开opencr的 ...
- TurtleBot3 Waffle (tx2版华夫)(6)
重要提示:请在配网通信成功后进行操作,配网后再次开机需要重新验证通信: 重要提示:[Remote PC]代表PC端.[TurtelBot]代表树莓派端: 操作步骤如下: 1)[Remote PC] 启 ...
随机推荐
- RabbitMQ Go客户端教程5——topic
本文翻译自RabbitMQ官网的Go语言客户端系列教程,本文首发于我的个人博客:liwenzhou.com,教程共分为六篇,本文是第五篇--topic. 这些教程涵盖了使用RabbitMQ创建消息传递 ...
- 老猿学5G:融合计费基于QoS流计费QBC的触发器Triggers
☞ ░ 前往老猿Python博文目录 ░ 一.引言 SMF中的功能体CTF在用户上网时达到一定条件就会向CHF上报流量,而CTF什么时候触发流量上报是由CTF中的触发器来控制的.在<老猿学5G: ...
- PyQt(Python+Qt)学习随笔:QDateEdit日期编辑部件和QTimeEdit时间编辑部件
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 Designer输入部件中,Date Edit和T ...
- 第10.8节 Python包的导入方式详解
一. 包导入与模块导入的关系 由于包本质上是模块,其实对模块的许多导入方法都适用于包,但由于包的结构与模块有差异,所以二者还是有些区别的: 对包的导入,实际上就是包目录下的__init__.py文件的 ...
- 【Vue】 axios同步执行多个请求
问题 项目中遇到一个需求,在填写商品的时候,选择商品分类后,加载出商品分类的扩展属性. 这个扩展属性有可能是自定义的数据字典里的单选/多远. 要用第一个axios查询扩展属性,第二个axios 从第一 ...
- uniapp 微信授权登陆
准备工作: 1.微信开发者账号 2.AppId .AppSecret (这些可以在开放平台申请到) 第一步 添加移动应用,仔细添加上述信息: 审批通过后,即刻 第二步 打开uniapp,开启OAuth ...
- Jenkins 如何实现 拷贝文件到网络共享目录
在使用jenkins中,发现拷贝文件时,不能在脚本中直接添加脚本实现. 我实现的一种方法,希望能对您有用. net use y: \\server_name\workspace "passw ...
- js滑动到页面底部实现
js实现 1.window.scrollTo(0,document.documentElement.clientHeight); //js jq实现 2 .var windowHeight = pa ...
- Panda交易所获悉,五地股权市场获批参与「区块链建设试点」
Panda交易所获悉,北京市地方金融监督管理局官网于7月21日发布信息显示,"证监会发布<关于原则同意北京.上海.江苏.浙江.深圳等5家区域性股权市场开展区块链建设工作的函>,原 ...
- 第一章、Docker 简介
笔记内容来自:第一本Docker书 [澳] James Turnbull 著 李兆海 刘斌 巨震 Docker 是一个能够把开发的应用程序自动部署到容器的开源引擎.(由Docker 公司,前dot ...