TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板
1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可:

2) 下载后打开,键入Turbot3的ip à回车à选择连接:

3) 登录后,电脑端显示的控制画面,即可进行操作。
4) 打开Ubuntu,这样就可以同时控制两端:
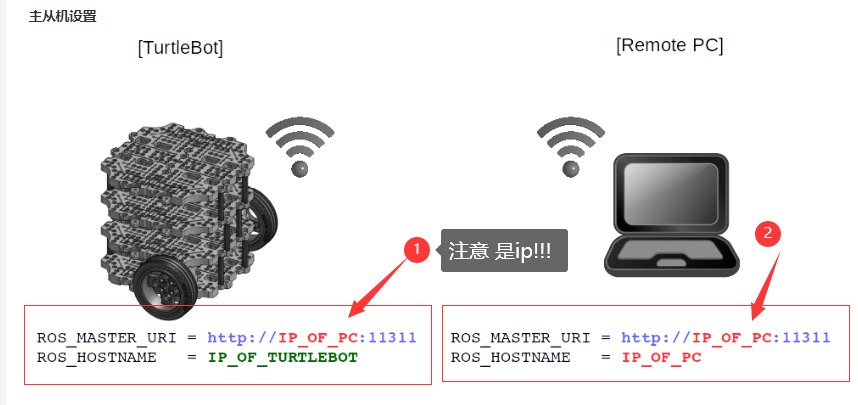
4.2. IP的配置
4.2.1.获取Remote PC和Turbot3的IP
首先获取Remote PC端和Turbot3端的IP
$ ifconfig

键入命令后回车à获取IP
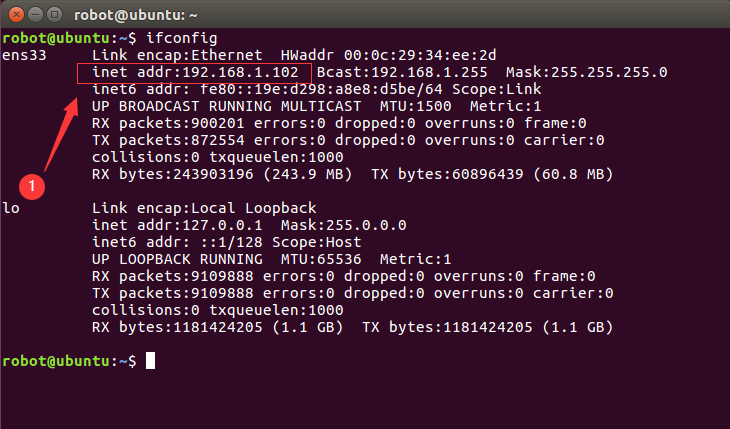
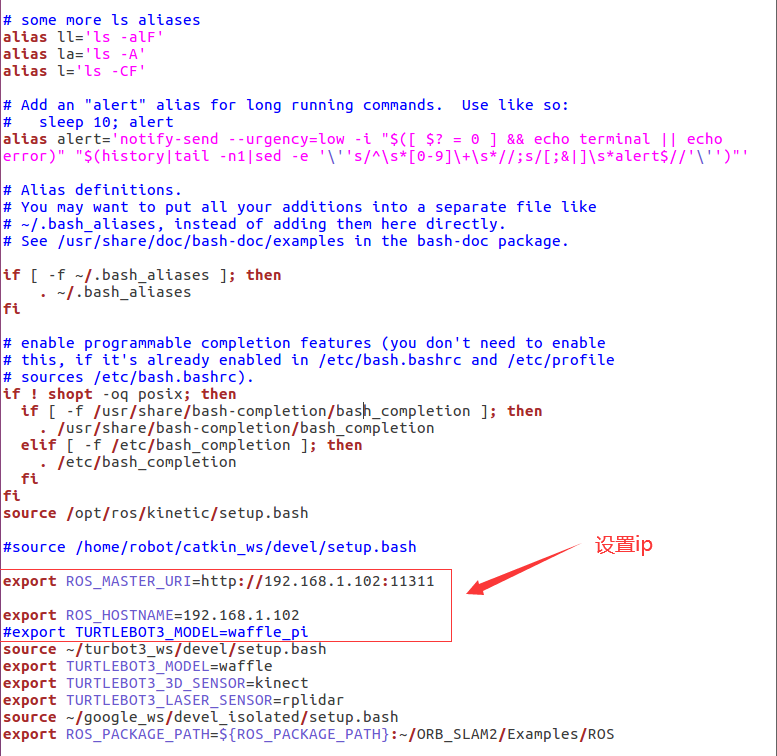
如上图获取的Remote PC的IP为:192.168.1.102
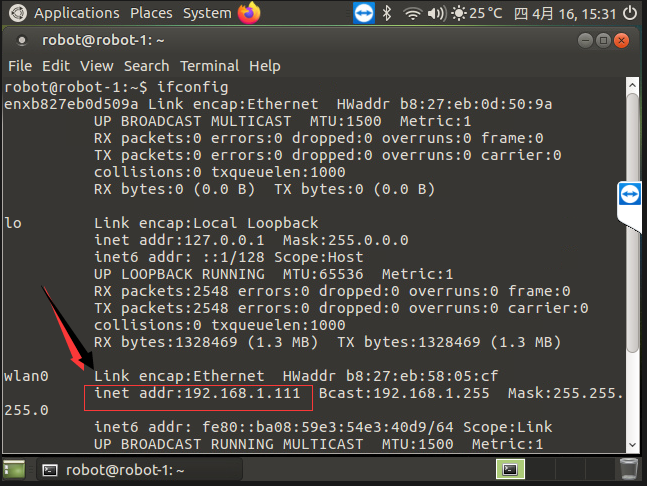
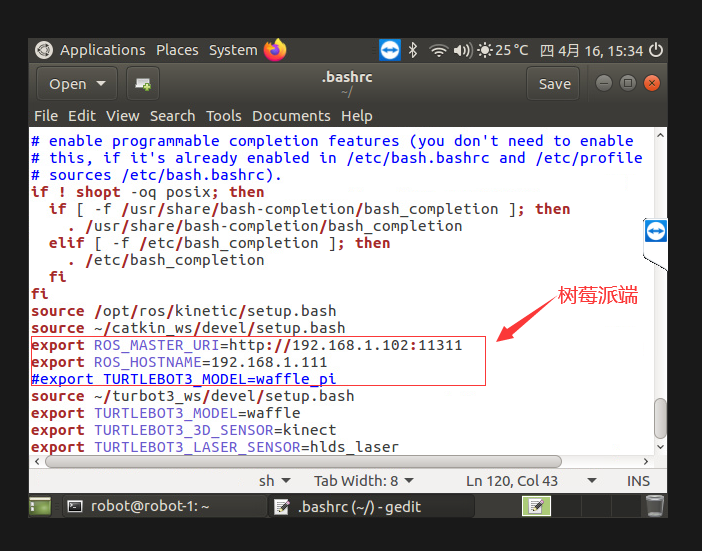
获取的Turbot3的IP为:192.168.1.111
4.2.2.修改Remote PC和Turbot3的IP
修改IP的命令为:
$ gedit ~/.bashrc
4.2.3.保存Remote PC和Turbot3端的修改
[Turbot3 && Remote PC] 让环境生效,配置的命令为:
$ source ~/.bashrc
4.3.通信测试
[Remote PC]端键入命令,启动roscore
$ roscore

[Turbot3]端键入通信命令(查看是否订阅到主机发布的话题):
$ rostopic list
出现上图,及说明通信成功。
TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信的更多相关文章
- TurtleBot3 Waffle (tx2版华夫)(2)系统安装
Tx2系统默认是安装好的,由于镜像文件大于20G,无法上传百度网盘,所以如有需要请联系我们客服:下面主要是操作步骤: 2.1.准备工作 a.准备好利用Jetpack刷过机的Ubuntu的主机(HOST ...
- TurtleBot3 Waffle (tx2版华夫)(1)笔记本上安装虚拟机、 Ubuntu 系统
1.1虚拟机的安装 1.1.1.windows7系统建议安装14.1版本 VMware workstation 百度云链接: 链接:https://pan.baidu.com/s/1q6Lh9fMuX ...
- TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明 这一节我们来讲 Turtlebot3 的 SLAMSLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知 ...
- TurtleBot3 Waffle (tx2版华夫)(13)RC100遥控杆控制
13.1.遥控器说明 使用ROBOTIS RC100的设置已经在ROS的OpenCR固件中,因此不需要安装必需软件包, 安装号即可使用. 13.2.遥控器的安装 1接线口穿过后壳的过孔. 2接线口连接 ...
- TurtleBot3 Waffle (tx2版华夫)(12)建图-hector建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(11)建图-karto建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(8)键盘控制
1)[Remote PC] 启动roscore $ roscore 2)[Turbot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(7)底盘测试
说明:opencr本身带有自测底盘功能,通过按opencr的sw1和sw2来自检底盘是否正确安装和运行: 7.1.前进测试 1)测试前,先把小车架空,轮子不要着地: 2)接好电源后,打开opencr的 ...
随机推荐
- PyQt(Python+Qt)学习随笔:containers容器部件GroupBox分组框介绍
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 1.主要属性 GroupBox分组框是一个对多个部件进行编组的框架容器,可以带有标题(title属性 ...
- flask中migrate和scipt进行连用
近期态度消极了,并且还忙着学php,所以可能flask框架的进度不会像之前那么快了.但是还是要保证跟之前高的质量滴.
- dom 继承树
- Android原子操作——android_atomic_cmpxchg
网络给我们带来了很多方便,查阅我们目前认知范围外的道理.但是,凡事也要学会分辨,不然可能会误导你. 话说,最近的一个项目(Mercury-Project),接近尾声中.然而,在调试一个demo时,却遇 ...
- 漫谈 HTTP 性能优化
本文主要是侧重于 HTTP 的优化,对于 HTTPS 后续文章会讲. 既然要做性能优化,那么,我们就需要知道:什么是性能?它都有哪些指标,又应该如何度量,进而采取哪些手段去优化? "性能&q ...
- sqli-labs less11-12(post型union注入)
less-11 post型union注入 过程: 输入admin admin 判断username password的闭合方式 对username查字段个数 ' union select 1,2# ' ...
- ant design 中实现表格头部可删除和添加
我是用antd pro做一个项目.有一个小需求是表格头部栏可操作.具体是表头的每一项都带一个"x"按钮,当不想展示这一栏的时候,直接点"x",这一栏就不展示了. ...
- [OI笔记]NOIP2017前(退役前)模拟赛的总结
好久没写blog了- 在noip2017前的最后几天,也就是在我可能将要AFO的前几天写点东西吧- 记录这最后几个月打的那些大大小小的模拟赛 一些比赛由于不允许公开所以就没有贴链接跟题面了- 2017 ...
- 网络编程-python实现-TCP(1.1.3)
@ 目录 1.TCP是什么 2.代码实现 1.TCP是什么 传输控制协议(TCP,Transmission Control Protocol)是一种面向连接的.可靠的.基于字节流的传输层通信协议,由I ...
- [从源码学设计]蚂蚁金服SOFARegistry 之 如何与Meta Server交互
[从源码学设计]蚂蚁金服SOFARegistry 之 如何与Meta Server交互 目录 [从源码学设计]蚂蚁金服SOFARegistry 之 如何与Meta Server交互 0x00 摘要 0 ...