TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)
1)[Remote PC] 启动roscore
$ roscore
2)[TurBot3] 启动turbot3
$ roslaunch turbot3_bringup minimal.launch
3)[TurBot3] 启动导航
$ roslaunch turbot3_navigation navigation_laser.launch map_file:=$HOME/map.yaml
4)[Remote PC] 启动Rviz
$ roslaunch turbot3_rviz navigation_rviz.launch
5)在开始导航之前,Turbot3应该知道它的位置和姿势
要给出初始数据,请按照说明进行操作
点击2D Pose Estimate按钮
通过单击并拖动地图上的方向来设置地图上的大致位置。
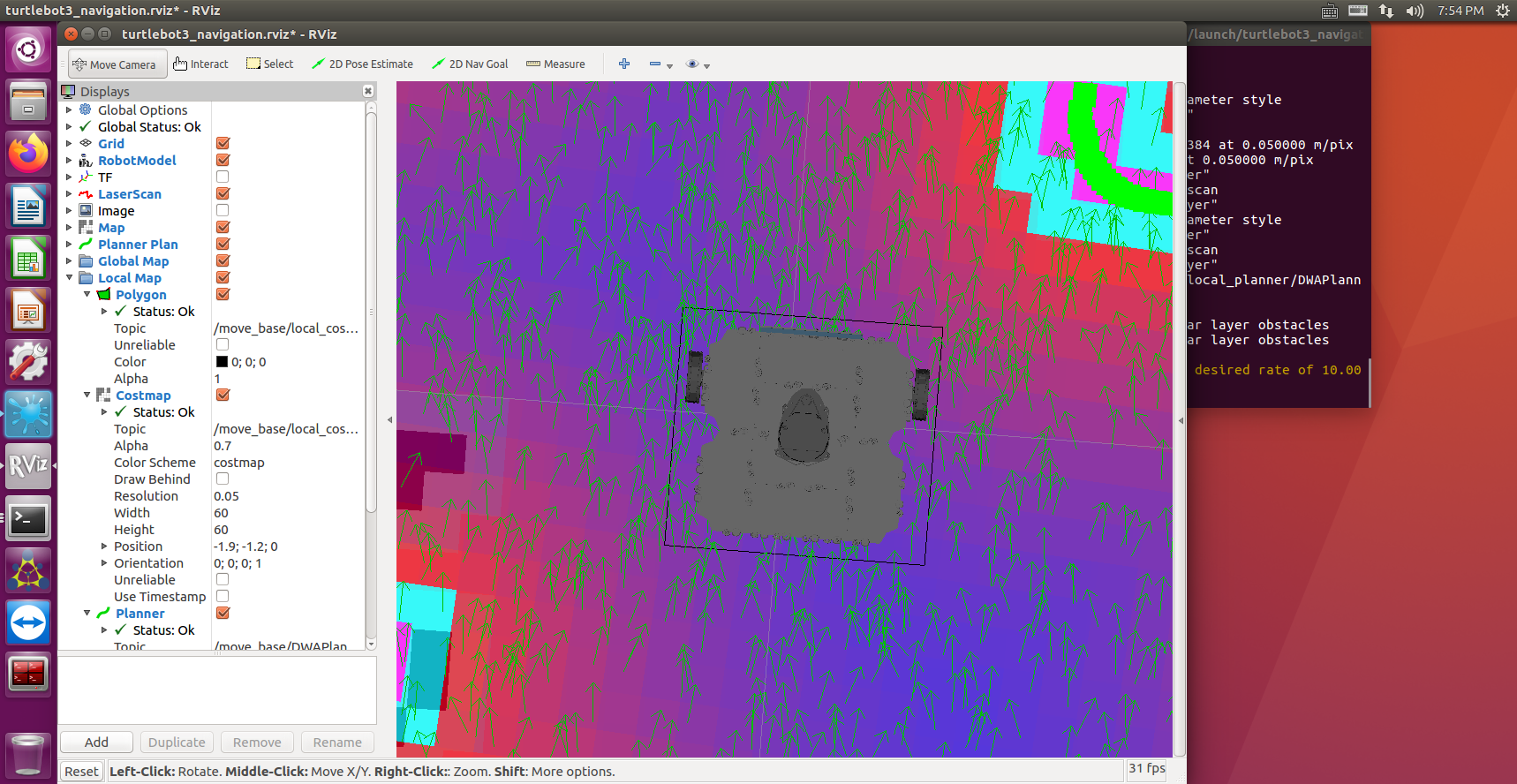
箭头的每个点意味着Turbot3的预期姿势。激光扫描仪将在近似位置绘制线条,如地图上的墙壁
如果图形没有显示线条,请重复上述过程

当Turbot3已经定位,它将自动计划路径
要发送目标位置:
点击 2D Nav Goal按钮
点击地图上你想要的TurtleBot驱动和拖动方向Turbot3应该指向地方
如果目标位置的路径被阻止,这可能会失败。
要在机器人到达目标位置之前停止机器人,请发送Turbot3的当前位
TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)的更多相关文章
- TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板 1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可: 2) 下载后打开,键入Turbot3的ip à回车à选择连接: 3) ...
- TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明 这一节我们来讲 Turtlebot3 的 SLAMSLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知 ...
- TurtleBot3 Waffle (tx2版华夫)(2)系统安装
Tx2系统默认是安装好的,由于镜像文件大于20G,无法上传百度网盘,所以如有需要请联系我们客服:下面主要是操作步骤: 2.1.准备工作 a.准备好利用Jetpack刷过机的Ubuntu的主机(HOST ...
- TurtleBot3 Waffle (tx2版华夫)(13)RC100遥控杆控制
13.1.遥控器说明 使用ROBOTIS RC100的设置已经在ROS的OpenCR固件中,因此不需要安装必需软件包, 安装号即可使用. 13.2.遥控器的安装 1接线口穿过后壳的过孔. 2接线口连接 ...
- TurtleBot3 Waffle (tx2版华夫)(12)建图-hector建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(11)建图-karto建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(8)键盘控制
1)[Remote PC] 启动roscore $ roscore 2)[Turbot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(7)底盘测试
说明:opencr本身带有自测底盘功能,通过按opencr的sw1和sw2来自检底盘是否正确安装和运行: 7.1.前进测试 1)测试前,先把小车架空,轮子不要着地: 2)接好电源后,打开opencr的 ...
- TurtleBot3 Waffle (tx2版华夫)(6)
重要提示:请在配网通信成功后进行操作,配网后再次开机需要重新验证通信: 重要提示:[Remote PC]代表PC端.[TurtelBot]代表树莓派端: 操作步骤如下: 1)[Remote PC] 启 ...
随机推荐
- Python+moviepy音视频剪辑:视频帧数据的本质、Clip的fl方法进行变换处理的原理以及滚屏案例
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt+moviepy音视频剪辑实战 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一. ...
- Python中函数的参数带星号是什么意思?
参数带星号表示支持可变不定数量的参数,这种方法叫参数收集. 星号又可以带1个或2个,带1个表示按位置来收集参数,带2个星号表示按关键字来收集参数. 1.带一个星号的参数收集模式: 这种模式是在函数定义 ...
- Python中对输入的可迭代对象元素排序的sorted函数
sorted根据输入可迭代对象中的项返回一个新的已排序列表,原输入参数对象中的数据不会发生变化. 具体可参考:<Python中与迭代相关的函数>的详细介绍 老猿Python,跟老猿学Pyt ...
- 分布式计算框架-MapReduce 基本原理(MP用于分布式计算)
hadoop最主要的2个基本的内容要了解.上次了解了一下HDFS,本章节主要是了解了MapReduce的一些基本原理. MapReduce文件系统:它是一种编程模型,用于大规模数据集(大于1TB)的并 ...
- pandas 聚合求和等操作
参考:https://blog.csdn.net/m0_38139979/article/details/106606633 result1= result.groupby(['user_id', ' ...
- print(end="\r") 滚动输出到屏幕
for i in range(10000): print(i, end = "\r") print(end="\r") 滚动输出到屏幕
- JDBC(二)—— 获取连接池方式
## 获取数据库连接的方式 ### 方式一 ```javaDriver driver = new com.mysql.cj.jdbc.Driver(); String url = "jdbc ...
- NOI Online #1 入门组 魔法
全网都是矩阵快速幂,我只会倍增DP 其实这题与 AcWing 345. 牛站 还是比较像的,那题可以矩阵快速幂 / 倍增,这题也行. 先 \(Floyd\) 预处理两点之间不用魔法最短距离 \(d_{ ...
- Spark3.0中Dates和Timestamps
Spark3.0使用的是预公历,而之前都是儒略历和公历的混合(即1582年之前的日期使用儒略历,1582年之后使用公历,java.sql.Date这个API用的就是这种,而Java8里使用java.t ...
- git 常用命令--超实用
git命令行常用操作 1.配置ssh key git config --global user.name 'git用户名' git config --global user.email '邮箱地址' ...