第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1、把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 。
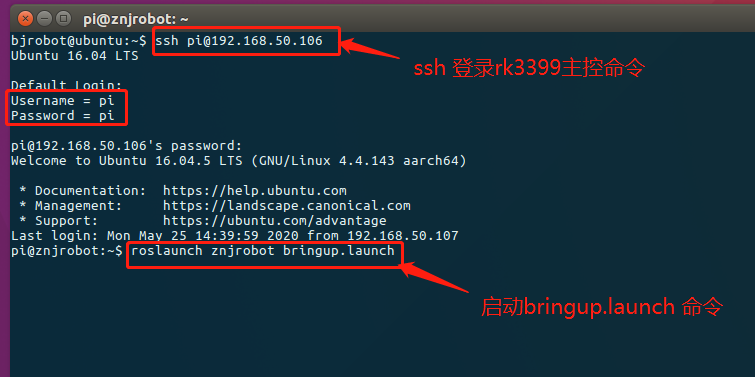
2、再打开一个终端,ssh 过去主控端,在
~/catkin_ws/src/znjrobot_project/znjrobot/param/imu 路径下启动 imu 校正命令。rosrun imu_calib do_calib

3、按提示输入回车即可完成校正。
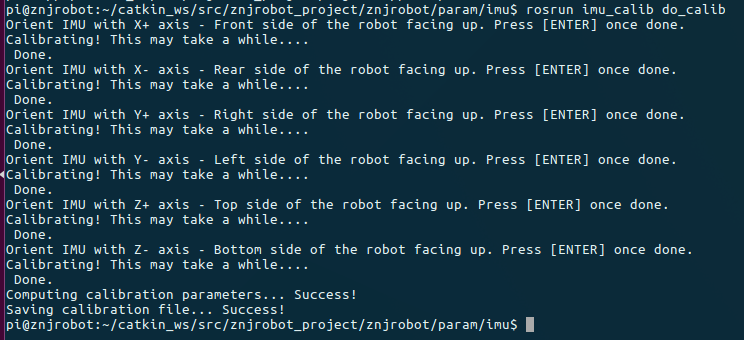
切记:运行imu自动校正,一定要先跳转到~/catkin_ws/src/znjrobot_project/znjrobot/param/imu目录下运行命令;
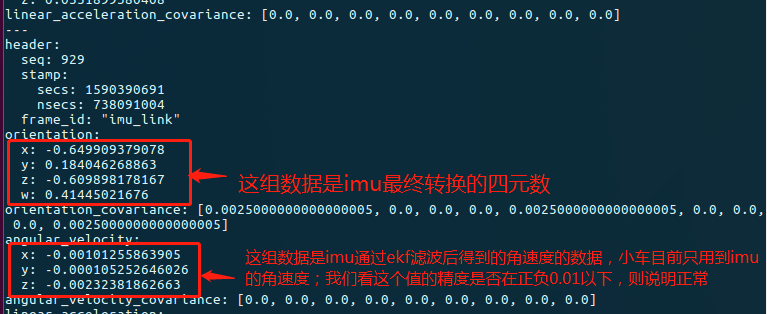
4、校准完成后,测试验证IMU参数是否准确:
需要重新启动bringup文件,让系统重新加载校准后的参数,也就是要关闭以前执行的roslaunch znjrobot bringup.launch命令(tips:Ctrl+C可以关掉当前终端的应用);
再重新开一个终端,执行查看imu话题的命令,执行rostoipc echo /imu/data命令就会出现校准后的IMU数值的界面,由于我们目前只用到IMU的角速度,因此我们看 角速度的的各项指标是不是正常就行:
第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上. 2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁; 3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止. 4.此 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
随机推荐
- 大数据-redis-redis启动出错
redis启动出错Creating Server TCP listening socket 127.0.0.1:6379: bind: No error 解决方法(1) 首先如果你是从官方redis官 ...
- moviepy音视频剪辑:使用rotate函数实现视频变换处理以及参数expand取值为True时的花屏问题解决方案
☞ ░ 前往老猿Python博文目录 ░ 一.rotate函数功能介绍 moviepy的rotate函数用于将剪辑逆时针旋转指定的角度或弧度. 调用语法:rotate(clip, angle, uni ...
- Python中的"缝合器"zip函数:将多个可迭代对象组合成一个迭代器
zip函数将参数中多个可迭代对象中相同序号的元素取出组合成一个元组作为输出列表的一个同样序号的元素,即输出列表的每个元素是一个元组,该元组的元素来源于参数中每个迭代对象的对应序号的元素. 具体可参考: ...
- 第2章 Python编程基础知识目录
第2.1节 简单的Python数据类型.变量赋值及输入输出 第2.2节 Python的语句 第2.3节 Python运算符大全 老猿Python,跟老猿学Python! 博客地址:https://bl ...
- PyQt(Python+Qt)学习随笔:Qt Designer中主窗口对象documentMode属性
documentMode属性表示当前主窗口是否启用文档模式,如果是则主窗口的选项卡部件会以适合操作文档的模式呈现,这类似于macOS上的文档模式. 设置此属性时,界面上不会呈现选项卡部件框架.此模式当 ...
- COMMENT SQL二次注入
这题目太顶了进去随便发个贴,出现登录已经提示用户名和密码了,弱密码登录(得自己去爆破)zhangwei666即可 没啥思路,扫下目录试试,kali的dirb扫到.git泄露githacker得到源码看 ...
- 攻防世界 ctf web进阶区 unserialize
进入到题目的界面,看到以下源码 构造payload=?code=O:4:"xctf":1:{s:4:"flag";s:3:"111";} 结 ...
- python学习之路 初识xml
import requests from xml.etree import ElementTree as ET r = requests.get('http://www.webxml.com.cn// ...
- STL—— 容器(vector)begin() 与 rbegin() , end() 与 rend()
1. Vector 迭代器首地址与尾地址 begin() 和 end() 在代码中可以将迭代器用作参数的位置可以使用 begin() 和 end() 获取地址,如下代码: 1 #include &l ...
- 11g RAC 集群数据库不能跟随集群启动
1.查看集群资源详细情况 [oracle@rac01-+ASM1 ~]$ crsctl stat res -p 2.修改集群资源ora.rac.db的auto_start属性改为always [ora ...