第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上。
2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁;
3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止。
4.此时手柄只有一个红灯常亮,再次插拔 USB 线后,还是只有一个红灯常亮,说明已经匹配成功了。
5.把手柄放在地上,回到虚拟机端。
6.按下图的步骤,进行蓝牙匹配
7.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
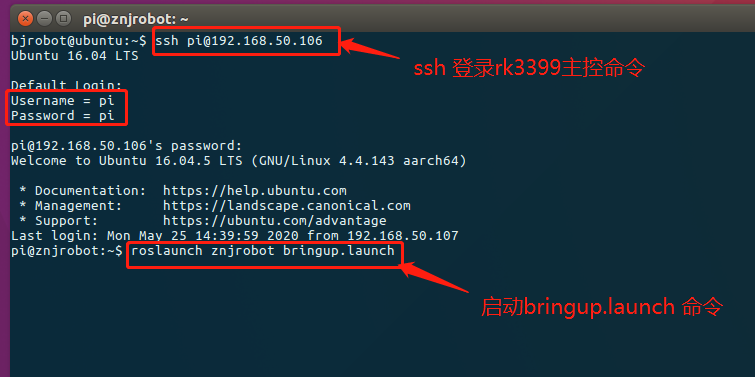
8.再打开一个终端,ssh 过去主控端启动 roslaunch znjrobot ps3.launch
9.此时按住下图所示手柄左上方的 2 号键,进入低速度模式,然后通过左边的摇杆控制小车前后左右移动,按住手柄左上方的 1 号键,可进入高速模式。
第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
随机推荐
- PyQt(Python+Qt)学习随笔:在一个窗口点击按钮弹出另一个窗口的实现方法及注意事项
在Qt Designer中定义了两个窗口,一个主窗口一个弹出窗口,需要实现在主窗口点击一个按钮时弹出弹出窗口. 经老猿验证: 1.弹窗的窗口类型无特殊要求,只要是QWidget等窗口部件就可以,也可以 ...
- LSB隐写加密MISC
没有做过LSB隐写加密的题目,在buuoj上面做到了就记录一下,估计后面很长的时间都会在这个平台上面训练自己的MISC和WEB,是很好的平台,把很多比赛的原题和安恒的周赛的复现了. 题目是MISC里面 ...
- C# Email 帮助类 EmailHelper
1. 配置文件 App.config <?xml version="1.0" encoding="utf-8" ?> <configurati ...
- IAR FOR STM8 同一个工程芯片选择003F3可以编译003K3提示空间不足
同一个工程文件,选择103F3可以编译通过,但是选择103K3便提示空间不足 百思不得其解,查阅大量资料无果.最后在IAR工程里面找到了配置文件 打开003f3的配置文件和003K3配置文件进行对比, ...
- 区块链产业发展热潮来袭,Panda Global 认为体验、安全是关键词
作为一项近些年才发展起来的新型技术,区块链自诞生之日起就备受关注,凭着去中心化.不可篡改.信息透明等多种关键特点,已成为变革传统产业的一项有力创新手段.当区块链热潮再度袭来之时,知名数字货币交易所Pa ...
- Mysql为什么使用b+树,而不是b树、AVL树或红黑树?
首先,我们应该考虑一个问题,数据库在磁盘中是怎样存储的?(答案写在下一篇文章中) b树.b+树.AVL树.红黑树的区别很大.虽然都可以提高搜索性能,但是作用方式不同. 通常文件和数据库都存储在磁盘,如 ...
- Linux文件被删除后恢复
当ext4中的文件被删除后,进行文件恢复:http://www.360doc.com/content/18/0320/08/51898798_738625260.shtml上面的博客是恢复删除的文件, ...
- webstorm2017.02版本如何使用material theme
本想废话一番,表达对material theme的喜欢.还是直接说方法吧~ file-settings-Plugins-Browse repositories-搜索 material theme -选 ...
- 免费部署个人博客到远端GitHub
前言 前面的博客我写到怎么样用hexo建立一个自己的博客网站(没看的可以先看前面那个文章地址,)但是它只能运行在本地端口,如果你分享给你的小伙伴他们是打不开的.如果把它部署到服务器上或空间上每个月都会 ...
- Consul的使用
Consul的使用 生产部署中,Consul安装在要注册服务的每个节点上.Consul有两种运行模式:客户端和服务器端,每个Consul数据中心必须至少有一个服务器,负责维护Consul状态,为了 ...