第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】

1、把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 。
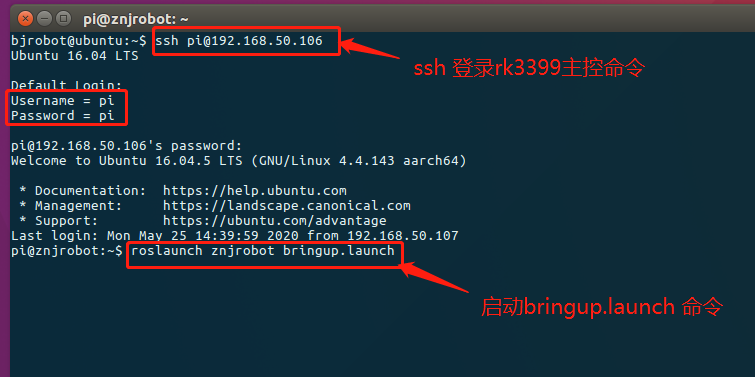
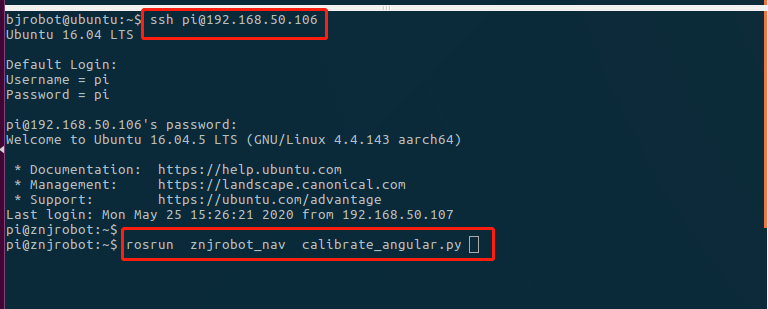
2、再打开一个终端 ssh 过去主控端,启动校正角速度命令rosrun znjrobot_nav calibrate_angular.py
3、在虚拟机端打开一个终端,直接运行 rosrun rviz rviz
4、全屏化后点击 File,点击 Open Config:
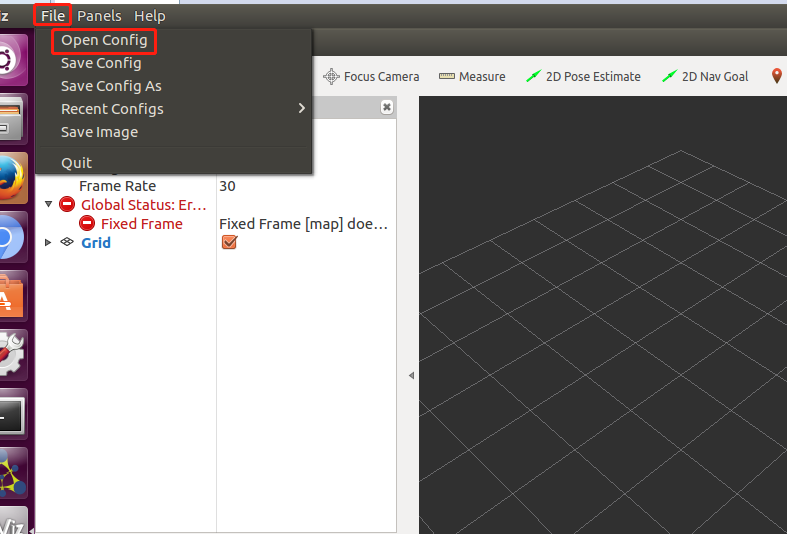
5、找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/ 的odometry.rviz 文件。点 Open

6、把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。

7、先记下手机指南针第一次的度数,比如:静止时第一次手机指南针度数50 度,如果原地旋转小车后(双手托起小车),小车转动后停下的度数超过 50,那么就是转够了一圈有多,如果小车转动后停下的度数小于 50,那么就是没有转够一圈。分以下两种情况:
情况 1:小车停下后度数假如是 60 度,那么小车实际上是转了 370 度。此时角速度比例系数 anguler_scale= 370/360 = 1.028
情况 2:小车停下后度数假如是 40 度,那么小车实际上是转了 350 度。此时角速度比例系数 anguler_scale= 350/360 = 0.972
8、在主控端的 bringup.launch 文件中把 anguler_scale 修改成实际计算好的角速度比例系数。


9、修改完成后,重新在主控端运行bringup.launch 、calibrate_angular.py文件,以及虚拟机端的rviz文件,然后第二次观察手机指南针上面的度数,记下度数,再次原地转动小车,小车实际转动多少度,然后跟第二次的度数做对比,差值小于 10 度以内的都是差不多可以的。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736


第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
随机推荐
- 原创题目 白银之春 Problem and Solution
白银之春 Solution 比赛用题面.题解.标程和数据生成器都挂在 git@github.com:sun123zxy/spring.git 上. Problem 白银之春 (spring.cpp/. ...
- PyQt(Python+Qt)学习随笔:QTreeWidget中标题相关属性访问方法headerItem、setHeaderLabels
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 树型部件窗口可以有一个标题头,其中包含部件中每个列的节(即标题).QTreeWidget的标题属性包 ...
- 74CMS3.0储存型XSS漏洞代码审计
发现一个总结了乌云以前代码审计案例的宝藏网站:https://php.mengsec.com/ 希望自己能成为那个认真复现和学习前辈们思路的那个人,然后准备慢慢开始审计一些新的小型cms了 骑士cms ...
- 题解 CF830D Singer House
\(\texttt{Solution}\) 首先考虑 \(\texttt{dp}\) 维护题目要求的深度为 \(i\), 每个节点最多经过一次的不同有向路径数量 \(f_i\). 明显的,只维护这个东 ...
- 【jenkins】构建工作集
构建工作集,参数化工作任务 1.New Item 2.配置新的工作任务 3.关联测试用例的远程仓库 4.添加任务构建后,触发发送报告信息 5.新建单个测试套件 6.添加触发轮询任务 7.关联测试集 8 ...
- 使用plsql 连接oracle数据库
1. 首先,需要下载oracle数据库的客户端,因为plsql是32位的,所以推荐下载32位的oracle数据库客户端呢 2. 将客户端解压到没有中文目录的文件夹下. 3. 在plsql中指定orac ...
- Servlet中的装饰者模式
装饰者模式 Decorator模式或者Wrapper模式允许修饰或者封装(在字面意义中,即修改行为)一个对象,即使你没有该对象的源代码或者该对象标识为final. Decorator模式适用于无法继承 ...
- vue在html使用
1.Vue: 定义:渐进式JavaScript框架 渐进式: 定义:声明渲染 组件系统 客户端路由 集中式状态管理 项目构建 2.MVVM 定义 M Model(服务器上的业务逻辑操作) V View ...
- 工具-python包-虚拟环境管理(99.4.1)
@ 目录 1.第一种方法-virtualenv 2.第二种方法-pycharm 关于作者 1.第一种方法-virtualenv 1.安装 pip install virtualenv pip inst ...
- 被 Pandas read_csv 坑了
被 Pandas read_csv 坑了 -- 不怕前路坎坷,只怕从一开始就走错了方向 Pandas 是python的一个数据分析包,纳入了大量库和一些标准的数据模型,提供了高效地操作大型数据集所需的 ...