第5章节 BJROBOT SLAM 构建地图
第五章节 BJROBOT SLAM 构建地图
建地图前说明:请确保你的小车已经校正好 IMU、角速度、线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界、虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!!
1.把小车平放在你想要构建地图的区域内地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
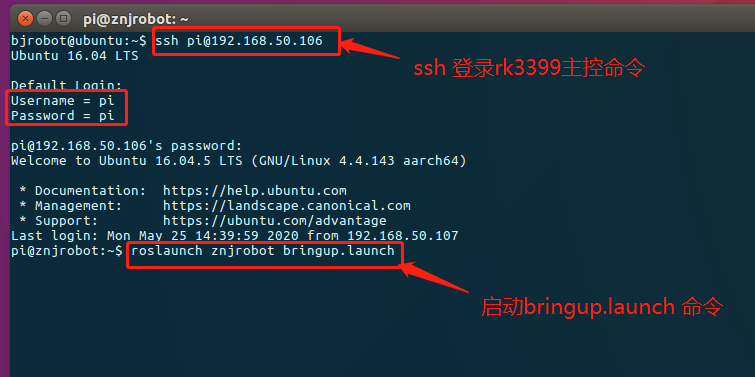
2.在虚拟机端打开一个终端,ssh 过去主控端启动roslaunch znjrobot lidar_slam.launch。
3.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz
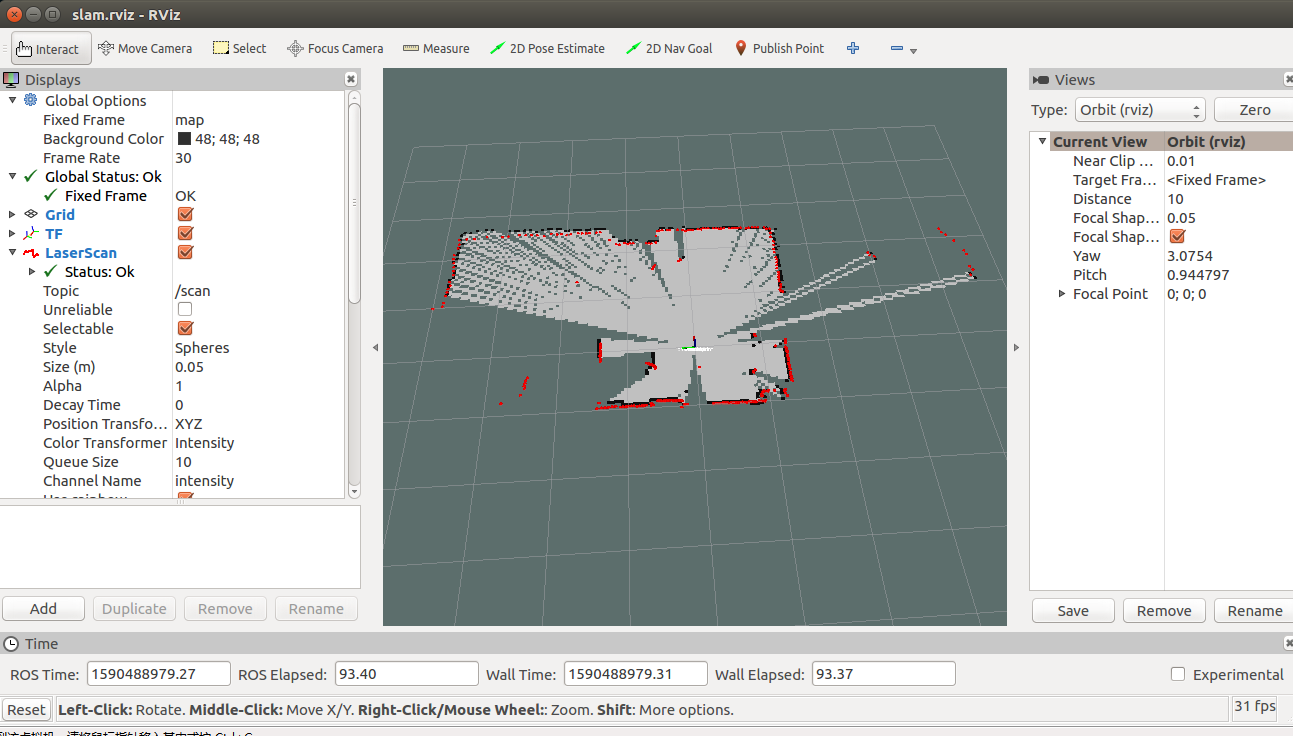
4.全屏化后点击 File,点击 Open Config,
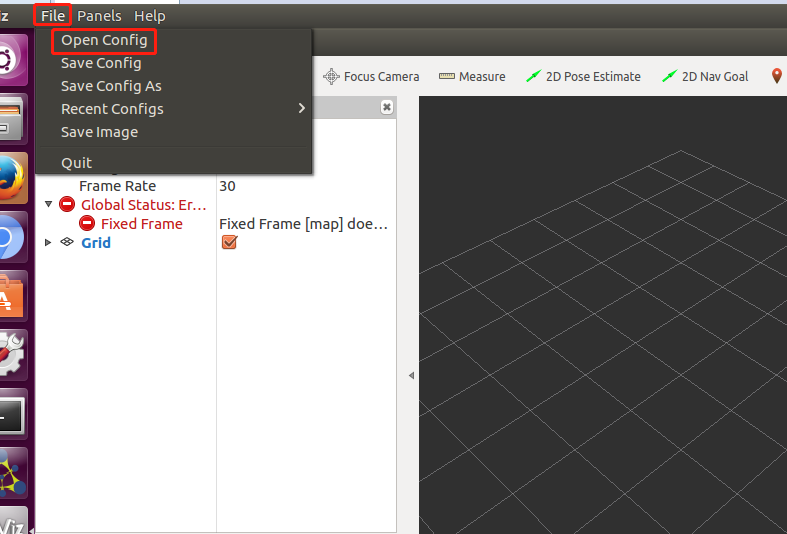
5.找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/slam.rviz,的slam.rviz 文件。点 Open

6.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
7.在虚拟机端,打开一个终端启动键盘控制,对小车进行移动控制,完成地图构建。
8.在虚拟机端,再打开一个终端,ssh 过去主控端,进入到
~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本。

执行完成后,即可查看到在目录下重新生成的house.pgm文件
第5章节 BJROBOT SLAM 构建地图的更多相关文章
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第六章节 BJROBOT 动态导航壁障
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动 roslaunch znjrobot b ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 软件篇-03-基于ORB_SLAM2手写SLAM稠密地图构建实现
本文使用的方法不是从内部修改ORBSLAM2源码以获取稠密点云,而是先从ZED2 sdk获取以摄像头坐标系为描述的三维点云/作为点云地图的一个子集,然后融合IMU与ORB_SLAM2进行实时定位,通过 ...
随机推荐
- bugku login4
(前排提示:这次思路写的极不清晰,可能只有我自己看的懂,打个预防针QAQ) 首先看题: 扫描,拿到了 .index.php.swp 这个文件是可以复原的. 上面的是重要的源码.审计之后发现这是CBC加 ...
- 百度前端技术学院-基础-day2
2020.9.15 今天是学习前端基础技术的第二天,今天制作了一个在线简历,纯html的那种.帮助我复习了以前的基础知识,也增加了新的知识点,比如制作列表可以用fieldset来整合数据. 我的在线简 ...
- 最简单的Go Dockerfile编写姿势,没有之一!
1. Dockerfile一些额外注意点 选择最简单的镜像 比如alpine,整个镜像5M左右 设置镜像时区 RUN apk add --no-cache tzdata ENV TZ Asia/Sha ...
- Dwango Programming Contest 6th E 题解
题目大意 你有一条区间\([0, X)\),并且有一个数组\(L_1, ..., L_n\).对于任意\(1 \leq i \leq n\),你可以指定一个非负整数\(0 \leq j_i \leq ...
- 查看java程序中对象占用空间大小
需要引入的jar包: <dependency> <groupId>com.carrotsearch</groupId> <artifactId>java ...
- 服务启动Apache服务,错误Parent: child process exited with status 3 -- Aborting.解决
不能启动apache,或者使用wamp等集成包后,唯独apache服务启动后有停止,但是把东西搬到其他机器上却没事问题可能和网络有关,我查了很多资料首先找打apache的错误报告日志,发现现实诸多的调 ...
- 云小课 | 需求任务还未分解,该咋整!项目管理Scrum项目工作分解的心酸谁能知?
温馨提醒:本文约3000字,需要阅读5分钟,共分为8个部分,建议分段阅读! 软件开发过程中,从产品概念形成到产品规划.往往要做详细的需求分析和项目规划等,因此,选对一款项目管理工具对开发者就显得尤为重 ...
- ORA-29701: unable to connect to Cluster Synchronization Service
修改主机名后,has无法启动,将has启动之后,尝试ASMCA,出现如图提示: 再尝试登陆asm实例,出现日下提示: [oracle@edgzrip2-+ASM ~]$ sqlplus / as sy ...
- Docker修改默认的网段
一,问题 docker安装后默认的网段是172.17网段的,和真实环境网段冲突导致本机电脑无法连接docker机器. 二,解决办法 修改docker默认网段 1,先把docker停止 systemct ...
- 自顶向下redis4.0(4)时间事件与expire
redis4.0的时间事件与expire 目录 redis4.0的时间事件与expire 简介 正文 时间事件注册 时间事件触发 expire命令 删除过期键值 被动删除 主动删除/定期删除 参考文献 ...