第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】

1、把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 。
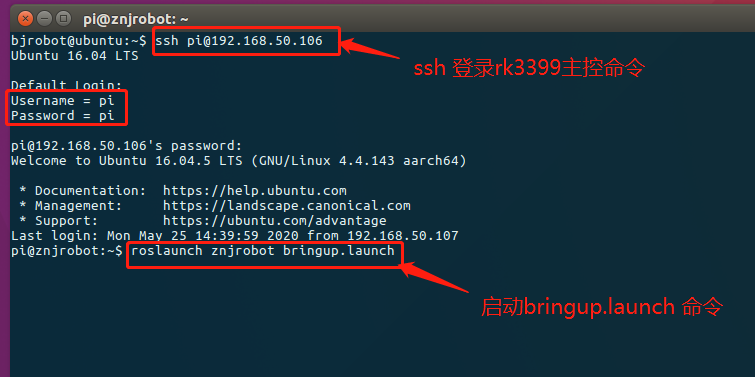
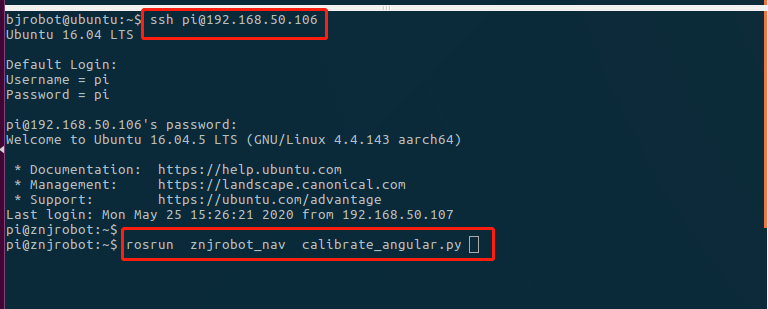
2、再打开一个终端 ssh 过去主控端,启动校正角速度命令rosrun znjrobot_nav calibrate_angular.py
3、在虚拟机端打开一个终端,直接运行 rosrun rviz rviz
4、全屏化后点击 File,点击 Open Config:
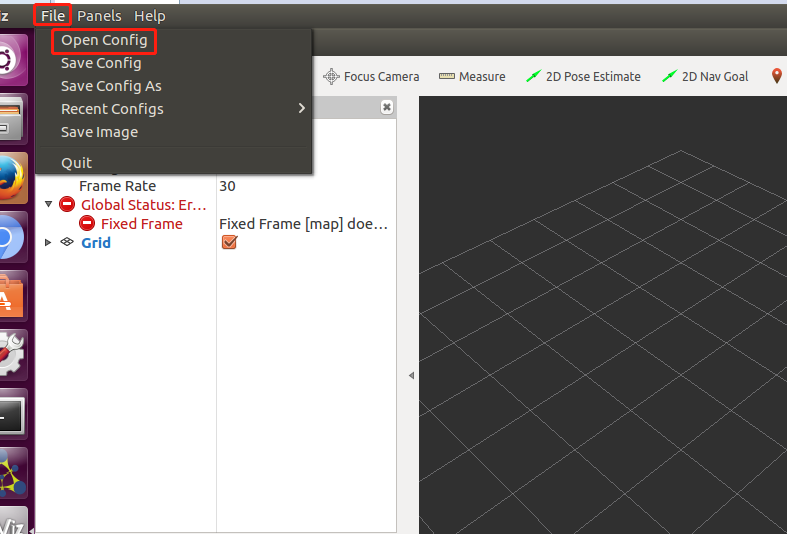
5、找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/ 的odometry.rviz 文件。点 Open

6、把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。

7、先记下手机指南针第一次的度数,比如:静止时第一次手机指南针度数50 度,如果原地旋转小车后(双手托起小车),小车转动后停下的度数超过 50,那么就是转够了一圈有多,如果小车转动后停下的度数小于 50,那么就是没有转够一圈。分以下两种情况:
情况 1:小车停下后度数假如是 60 度,那么小车实际上是转了 370 度。此时角速度比例系数 anguler_scale= 370/360 = 1.028
情况 2:小车停下后度数假如是 40 度,那么小车实际上是转了 350 度。此时角速度比例系数 anguler_scale= 350/360 = 0.972
8、在主控端的 bringup.launch 文件中把 anguler_scale 修改成实际计算好的角速度比例系数。


9、修改完成后,重新在主控端运行bringup.launch 、calibrate_angular.py文件,以及虚拟机端的rviz文件,然后第二次观察手机指南针上面的度数,记下度数,再次原地转动小车,小车实际转动多少度,然后跟第二次的度数做对比,差值小于 10 度以内的都是差不多可以的。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736


第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
随机推荐
- sql black list 绕过
Black list is so weak for you,isn't it 姿势: return preg_match("/set|prepare|alter|rename|select| ...
- cglib、orika、spring等bean copy工具性能测试和原理分析
简介 在实际项目中,考虑到不同的数据使用者,我们经常要处理 VO.DTO.Entity.DO 等对象的转换,如果手动编写 setter/getter 方法一个个赋值,将非常繁琐且难维护.通常情况下,这 ...
- v-lazyload数据变化图片不切换
这个问题让我很困惑,明明得到的商品数据已经改变了,但是就图片不变化,随后找到了解决办法,那就是多加一个动态的key <img v-lazy="item.productImage&quo ...
- 四、java多线程核心技术——synchronized同步方法与synchronized同步快
一.synchronized同步方法 论:"线程安全"与"非线程安全"是多线程的经典问题.synchronized()方法就是解决非线程安全的. 1.方法内的变 ...
- 协程gevent学习
import gevent def f1(): print(11) gevent.sleep(2) print(33) def f2(): print(22) gevent.sleep(1) prin ...
- .NET5下的三维应用程序开发
终于等到了.NET5的发布,怀着激动的心情体验了一下:"香"就一个字. 如何基于.NET5开发工业软件,也广大三维应用开发者关心的问题.我们的Rapid SDK已经率先支持.NET ...
- 20201213-1 HTML基本标签(一)
> HTML 基本结构 <> </> 标签对 > 一个 HTML 文档由 4 个基本部分组成: 文档声明:<!DOCTYPE HTML>声明这是一个 ...
- eclipse提示JVM版本太低
解决方案:去eclipse的安装路径找到eclipse.ini文件,然后在头部指定JVM的版本(第一第二行) -vm C:/Program Files/Java/jdk-11.0.9/bin -sta ...
- Linux下常用日志说明
/var/log/message ------------------------------------------系统启动后的信息和错误日志 /var/log/secure ----------- ...
- html2canvas使用心得
近两年做了几次微信H5活动的开发,为了达到传播分享的效果,通常最终都需要生成个性化的图片,供用户长按保存分享,在这里就把自己的一些使用心得记录下来,供其他小伙伴借鉴. 这里备注一下,我目前用的是 h ...