TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明
这一节我们来讲 Turtlebot3 的 SLAM
SLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希
望机器人从未知环境的未知地点出发, 在运动过程中通过重复观测到的地图特征(比如, 墙角, 柱子等) 定位自身位置和姿态, 再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。 (维基百科)
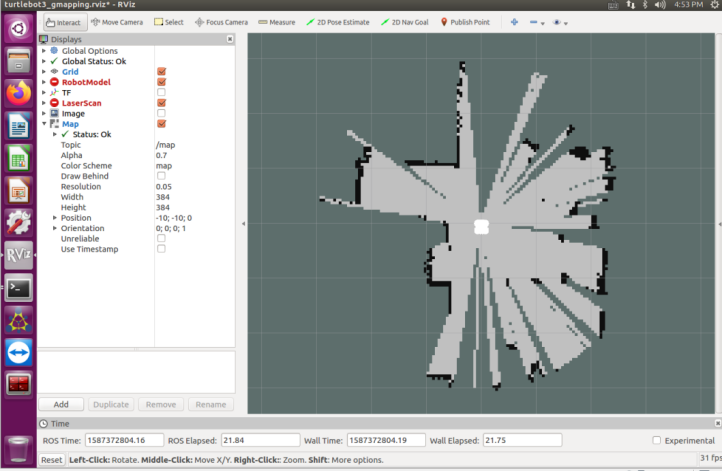
9.2.通过远程操作创建地图
1)[Remote PC] 启动roscore
$ roscore
1)[TurBot3] 启动turbot3
$ roslaunch turbot3_bringup minimal.launch
2)[TurBot3] 运行SLAM启动文件
$ roslaunch turbot3_slam gmapping_demo.launch
3)[Remote PC] 启动Rviz可视化模型
$ roslaunch turbot3_rviz navigation_rviz.launch
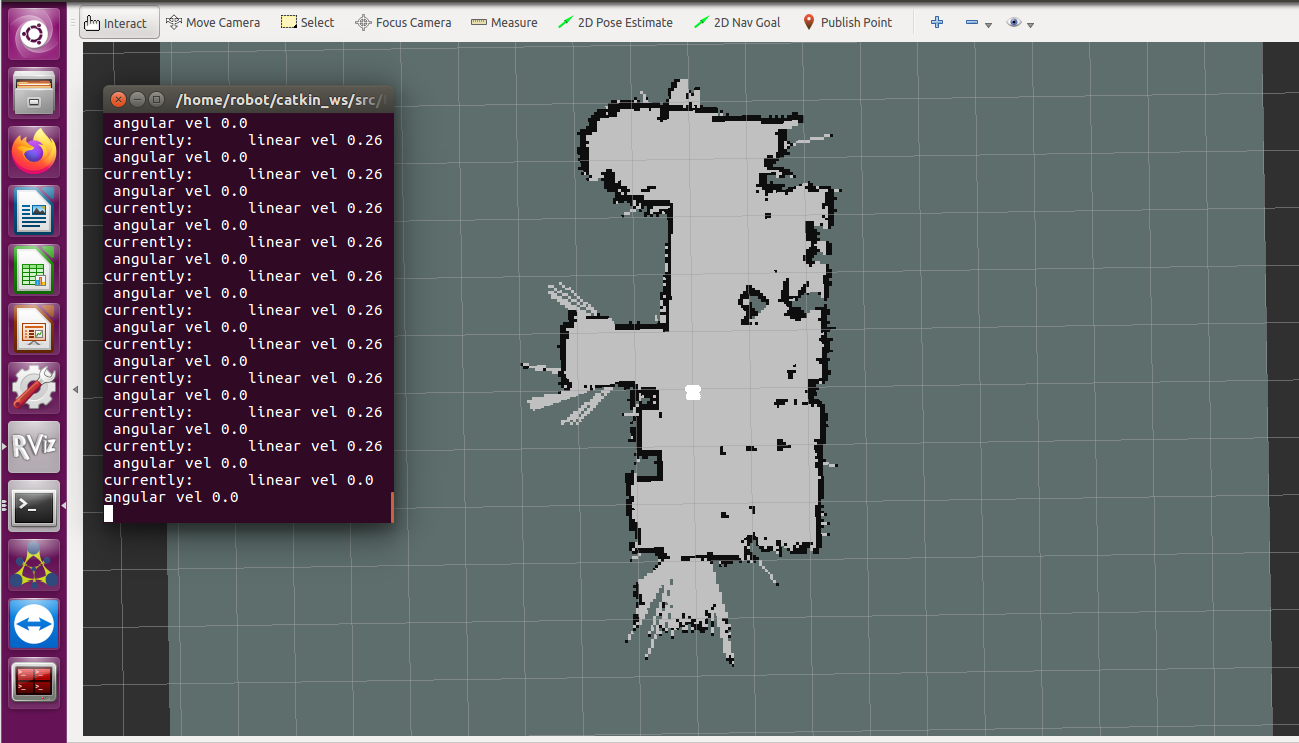
4)[Remote PC] 启动键盘操作
$ roslaunch turbot3_teleop keyboard.launch
移动turbot3进行建图
5)[TurBot3] 完成建图后运行地图保存节点
$ rosrun map_server map_saver -f ~/map
map.pgm和map.yaml 在 ~/ 目录里创建

TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)的更多相关文章
- TurtleBot3 Waffle (tx2版华夫)(12)建图-hector建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(11)建图-karto建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(5)激活你的雷达
重要提示:请在配网通信成功后进行操作,配网后再次开机需要重新验证通信: 重要提示:[Remote PC]代表PC端.[TurtelBot]代表树莓派端: 5.1.操作步骤 1)[Remote PC] ...
- TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板 1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可: 2) 下载后打开,键入Turbot3的ip à回车à选择连接: 3) ...
- TurtleBot3 Waffle (tx2版华夫)(2)系统安装
Tx2系统默认是安装好的,由于镜像文件大于20G,无法上传百度网盘,所以如有需要请联系我们客服:下面主要是操作步骤: 2.1.准备工作 a.准备好利用Jetpack刷过机的Ubuntu的主机(HOST ...
- TurtleBot3 Waffle (tx2版华夫)(13)RC100遥控杆控制
13.1.遥控器说明 使用ROBOTIS RC100的设置已经在ROS的OpenCR固件中,因此不需要安装必需软件包, 安装号即可使用. 13.2.遥控器的安装 1接线口穿过后壳的过孔. 2接线口连接 ...
- TurtleBot3 Waffle (tx2版华夫)(8)键盘控制
1)[Remote PC] 启动roscore $ roscore 2)[Turbot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(7)底盘测试
说明:opencr本身带有自测底盘功能,通过按opencr的sw1和sw2来自检底盘是否正确安装和运行: 7.1.前进测试 1)测试前,先把小车架空,轮子不要着地: 2)接好电源后,打开opencr的 ...
随机推荐
- 极简python教程02:基础变量,删繁就简
python极简教程已经开赛,如果错过说明可以回翻: 极简python教程:赛前说明 借这个机会,我再讲讲我的教程和其他网上的教程的区别: 1 我分享的内容,是我在工作中会高频使用的语法,是精华内容 ...
- 转:Chrome浏览器查看网站登录 Cookie 信息的方法
当我们使用自动签到等程序的时候一般都要用到网站Cookie,我们可以借助浏览器的扩展来获取Cookie信息,但其实通过浏览器本身的功能就可以查看Cookie信息.以Chrome类浏览器为例有以下三种方 ...
- CNVD漏洞证书(1)
之前申请了CNVD原创漏洞,踩了坑,记录一下 有很多师傅写过相关的文章: https://blog.csdn.net/qq1124794084/article/details/82657840 htt ...
- 堆叠注入tips
漏洞成因 使用mysqli_multi_query()这种支持多语句执行的函数 使用PDO的方式进行数据查询,创建PDO实例时PDO::MYSQL_ATTR_MULTI_STATEMENTS设置为tr ...
- kickstart 谷歌 D 2020 年 7 月 12 日 13: 00 - 16: 00
https://codingcompetitions.withgoogle.com/kickstart/round/000000000019ff08/0000000000386d5c (kick st ...
- 数据结构——创建链表或树节点的小trick(哑结点)
一般创建链表时,我们可以创建一个哑结点,来保存头部 * struct ListNode { * int val; * ListNode *next; * ListNod ...
- java视频格式转换
项目中需要对各种视频格式转码为mp4格式,试了好多办法,最后使用ffmpeg 工具完美转码,ffmpeg能解析的格式:(asx,asf,mpg,wmv,3gp,mp4,mov,avi,flv等) 链接 ...
- 权威部门接连下发文件,Panda交易所带你走进区块链概念股
Panda交易所获悉,7月21日,北京市地方金融监督管理局发文<北京股权交易中心获得首批开展区块链试点建设资格>,文中表示证监会7月7日发布<关于原则同意北京.上海.苏州.浙江.深圳 ...
- 【CH 弱省互测 Round #1 】OVOO(可持久化可并堆)
Description 给定一颗 \(n\) 个点的树,带边权. 你可以选出一个包含 \(1\) 顶点的连通块,连通块的权值为连接块内这些点的边权和. 求一种选法,使得这个选法的权值是所有选法中第 \ ...
- 2020/12月最新WinSpy/WinSpy++下载exe
>>>下载地址 https://wws.lanzous.com/iFUsVj931xa 密码:5hp7 解压密码:yunmuq 夹带私货:在这里希望大家分享文件别再用百度云了,不用百 ...