第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】

BJROBOT 线速度校正
1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动
roslaunch znjrobot bringup.launch。
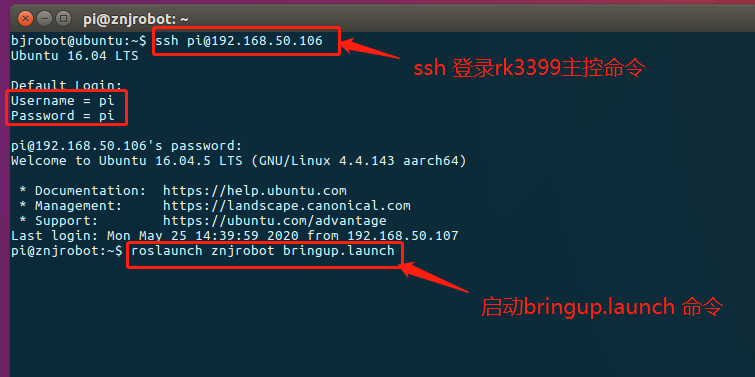
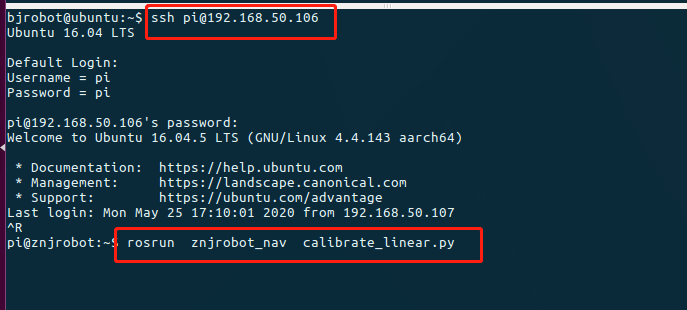
2.在虚拟机端打开一个终端,ssh 过去小车主控端,启动校正线速度命令rosrunznjrobot_nav calibrate_linear.py
3.在虚拟机端再打开一个终端,直接启动 rosrunrqt_reconfigure rqt_reconfigure

4点击 start_test,进行第一次的走一米测试,测量小车走的距离。
假如小车走了 1.1 米,那么线速度的比例系数 linear_scale = 1.1/1=1.1 假如小车走了 0.9 米,那么线速度的比例系数 linear_scale = 0.9/1= 0.9
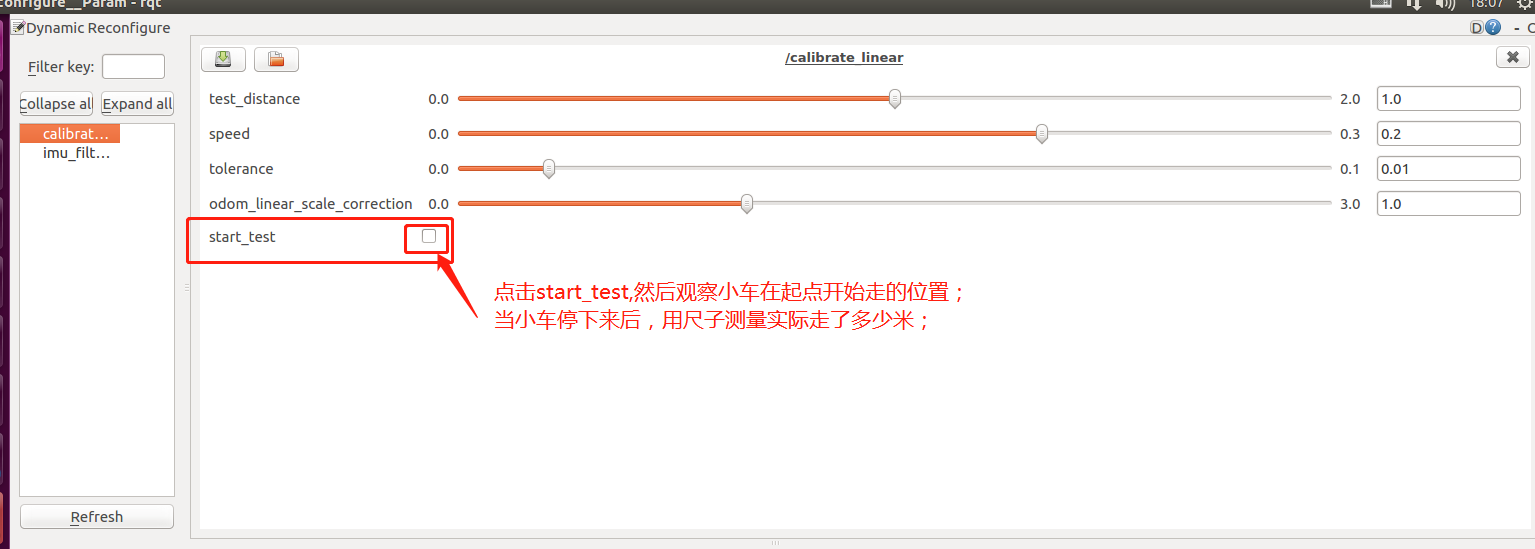
5.然后车放回原来起点位置,把比例系数修改到下图所示位置,再点击 start_test,当小车停下来的时候,再次测量小车是否走了一米,如果接近或者差不多 1 米,那么这个比例系数就是正确的。误差再 1 厘米以内可以接
受。
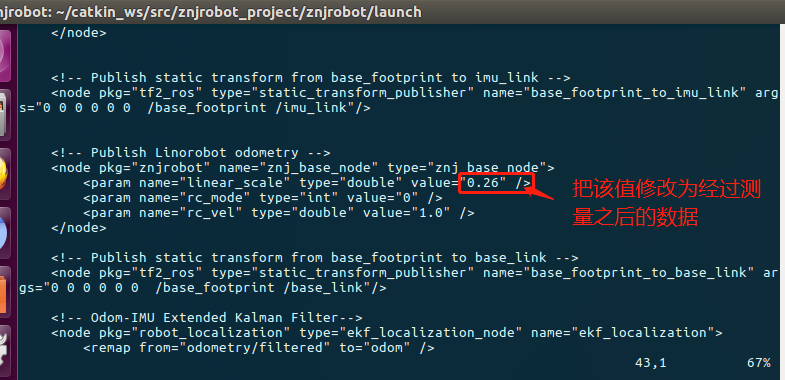
6.在主控端的bringup.launch 文件中把linear_scale 修改成实际计算好的线速度比例系数。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736


第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
随机推荐
- moviepy音视频开发专栏文章目录
☞ ░ 前往老猿Python博文目录 ░ <moviepy音视频开发专栏>为收费专栏,基于老猿阅读moviepy1.03版本的源代码以及大量测试验证的基础上,详细介绍moviepy主要音视 ...
- 转:http协议学习系列(响应头---Response Headers)
HTTP最常见的响应头如下所示: ·Allow:服务器支持哪些请求方法(如GET.POST等): ·Content-Encoding:文档的编码(Encode)方法.只有在解码之后才可以得到Conte ...
- 第14.8节 Python中使用BeautifulSoup加载HTML报文
一. 引言 BeautifulSoup是一个三方模块bs4中提供的进行HTML解析的类,可以认为是一个HTML解析工具箱,对HTML报文中的标签具有比较好的容错识别功能.阅读本节需要了解html相关的 ...
- 步步为营,打造CQUILib UI框架库
步步为营,打造CQUILib UI框架库 UI框架包括如下几个方面:: 丰富的UI控件 窗口管理 主题 多语言 托盘 视图与业务解耦 登录框效果如下:: 提示框效果如下:: 后续讲解如何步步为营,打造 ...
- Panda Global发现,FATF关于区块链金融又发声
众所周知,FATF是一个由G7成员国在1989年在法国巴黎所成立的,具有国际反洗钱和反恐融资领域最具权威性的国际组织,全称叫金融行动特别工作组.2007年,中国而加入了该组织,迄今为止FATF成员已涵 ...
- 函数动态参数 *args **kwargs
def f1(*args,**kwargs): print(args,type(args)) print(kwargs,type(kwargs))li = [11,22,33]dic = {'k1': ...
- 数组问题:a[i][j] 和 a[j][i] 有什么区别?
本文以一个简单的程序开头--数组赋值: int LEN = 10000; int[][] arr = new int[LEN][LEN]; for (int i = 0; i < LEN; i+ ...
- vscode 编辑python文件
1 安装python 自动姿势 Chinese # 换成中文 path Autocomplete 路径自动补全 Vetur vue文件补全 配置文件 首选项-设置 应用程序 在 seyying.jso ...
- JavaSE20-线程&同步
1.线程 1.1 基本概念 线程的概念 线程(Thread)是操作系统能够进行运算调度的最小单位.它被包含在进程之中,是进程中的实际运作单位.一条线程指的是进程中一个单一顺序的控制流,一个进程中可以并 ...
- 【JAVA基础】静态方法
/* * 与Python的静态单例比较: * 一样是需要加上static方法才可以直接调用类里面的私有方法 * * Python的类方法上 加上装饰器@staticmethod就可以不用实例化类而直接 ...