第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
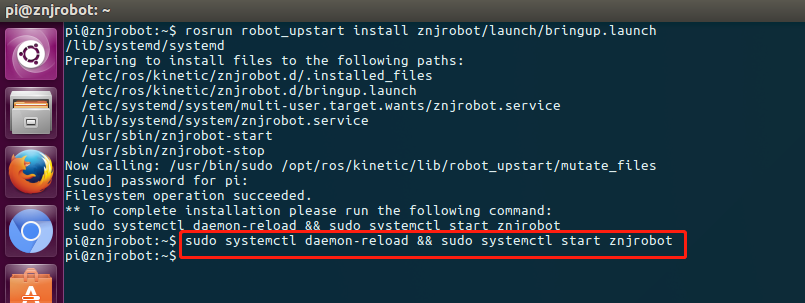
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch

2.按照上一步提示运行命令:sudo systemctl daemon-reload && sudo systemctl start znjrobot。
3.再继续运行 sudo service znjrobot start

4.此时通过 rostopic list,可以查看到 bringup.launch,已经导入开机自启动服务。

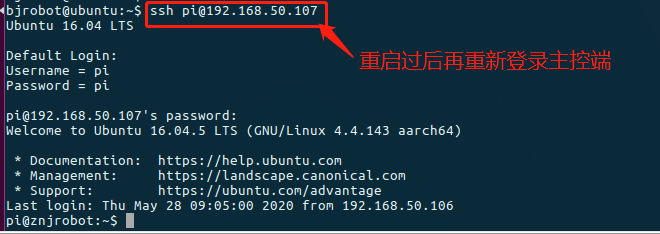
5.按下图输入命令重启主控,重启后再 ssh 过去主控端。

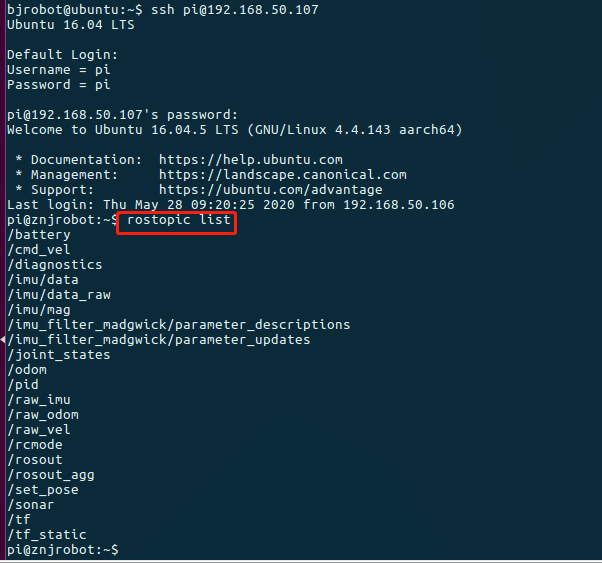
6.此时主控是重启后的,运行 rostopic list 可以看到 bringup.launch 启动后的相关话题。
7.在虚拟机端打开一个终端,输入 rostopic echo /battery,可以在虚拟机端查看到主控端发布的电池电压话题信息。
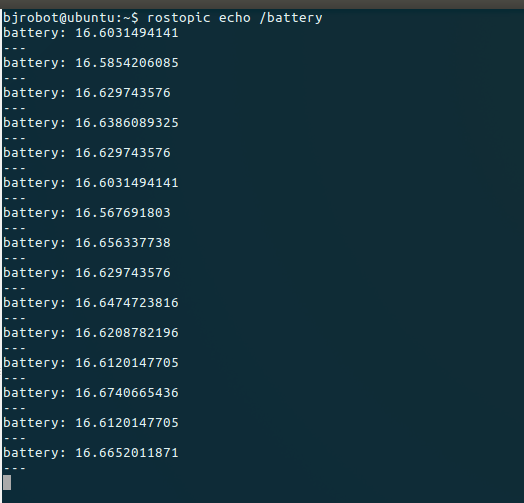
8.在上一个步骤用键盘 ctrl+c 取消话题信息输入,然后启动键盘控制小车移动。
Rosrunteleop_twist_keyboard teleop_twist_keyboard.py。
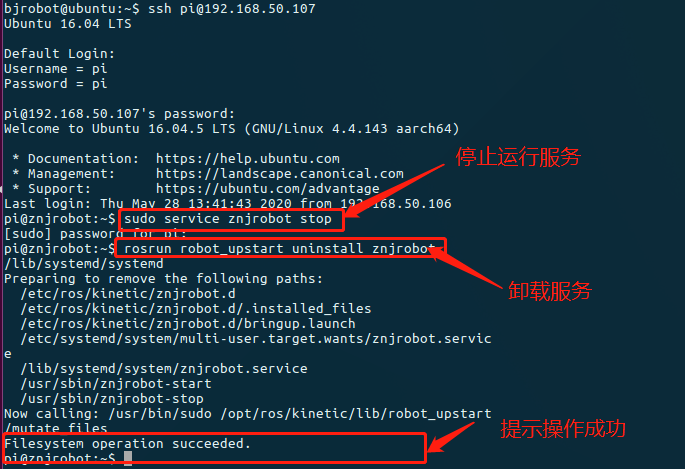
9.按下图步骤可以取消开机自启动服务。
登录主控端:sudo service znjrobot stop
rosrun robot_upstart uninstall znjrobot
第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上. 2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁; 3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止. 4.此 ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
随机推荐
- 老猿学5G:融合计费场景的离线计费会话的Nchf_OfflineOnlyCharging_Update 更新操作过程
☞ ░ 前往老猿Python博文目录 ░ 一.Nchf_OfflineOnlyCharging_Update消息交互过程 Nchf_OfflineOnlyCharging_Update消息是是5G融合 ...
- PyQt(Python+Qt)学习随笔:Designer中的QDialogButtonBox的orientation和centerButtons属性
orientation属性 orientation属性表示QDialogButtonBox的方向,缺省情况下,方向为水平方向(值为Qt.Horizontal),表示QDialogButtonBox中的 ...
- PyQt(Python+Qt)学习随笔:Qt Designer中主窗口对象的tabShape属性
tabShape属性用于控制主窗口标签部件(Tab Widget)中的标签的形状,对应类型为QTabWidget.TabShape,有两种取值: 1.QTabWidget.Rounded:对应值为0, ...
- PyQt(Python+Qt)学习随笔:Qt Designer中主窗口对象的toolButtonStyle属性
tooButtonStyle属性保存主窗口工具栏按钮的样式设置,用来表示工具栏按钮的文字和图标怎么显示. 该属性的可设置值类型为枚举类型Qt.ToolButtonStyle,它包含如下值: 该属性的缺 ...
- 乌云wooyun网站硬盘复活
AWD比赛防止没有网络,在移动硬盘里面准备一个乌云漏洞库. 之前也想过弄一个乌云的镜像网站,无奈学生机性能太低下了,部署到公网上服务器存储空间都不够,只能部署在本地硬盘了. 乌云镜像的开源地址:htt ...
- js onreadystatechange 和 onload的区别
IE的script 元素只支持onreadystatechange事件,不支持onload事件. FF的script 元素不支持onreadystatechange事件,只支持onload事件. 如果 ...
- CF500G / T148321 走廊巡逻
题目链接 这题是 Codeforces Goodbye 2014 的最后一题 CF500G,只是去掉了 \(u \not= x, v \not = v\) 的条件. 官方题解感觉有很多东西说的迷迷瞪瞪 ...
- CSP-S 2019 Emiya 家今天的饭
64 pts 类似 乌龟棋 的思想,由于 \(64pts\) 的 \(m <= 3\), 非常小. 我们可以设一个 \(dp\),建立 \(m\) 个维度存下每种物品选了几次: \(f[i][A ...
- 使用Binlog日志恢复误删的MySQL数据
解到: MySQL的binlog日志是什么?通常是用来干什么的? 模拟一次误删数据的操作,并且使用binlog日志恢复误删的数据. 写这篇文章的初衷,是有一次我真的险些把测试数据库的一张表给删除了,当 ...
- Java PDF全套笔记
java 知识pdf文档,基本涵盖了java知识点 java基础部分:https://github.com/HOSystemH/JavaFile/tree/master/JavaPDF java高级部 ...