第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上。
2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁;
3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止。
4.此时手柄只有一个红灯常亮,再次插拔 USB 线后,还是只有一个红灯常亮,说明已经匹配成功了。
5.把手柄放在地上,回到虚拟机端。
6.按下图的步骤,进行蓝牙匹配
7.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
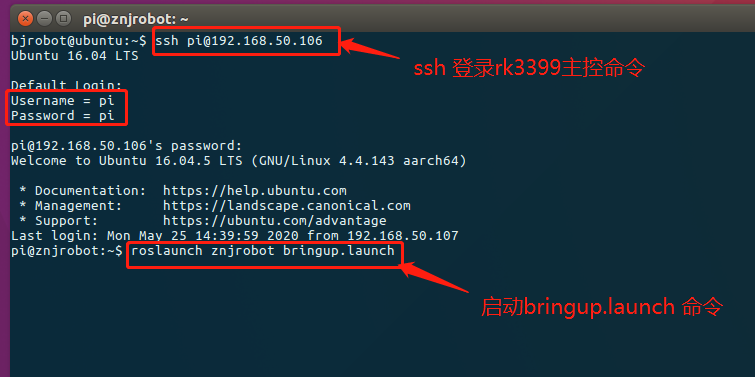
8.再打开一个终端,ssh 过去主控端启动 roslaunch znjrobot ps3.launch
9.此时按住下图所示手柄左上方的 2 号键,进入低速度模式,然后通过左边的摇杆控制小车前后左右移动,按住手柄左上方的 1 号键,可进入高速模式。
第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
随机推荐
- 注意当cin.getline、和cin 合用的时候
1. getline有两种,一个是string的(getline(cin,s)),一个是istream的(cin.getline(s,maxsize,delim)). 2. 当用cin输入了数据后,在 ...
- MySQL索引(一)索引基础
索引是数据库系统里面最重要的概念之一.一句话简单来说,索引的出现其实是为了提高数据查询的效率,就像书的目录一样. 常见模型 索引的出现是为了提高查询效率,但是实现索引的方式却有很多种,这里就介绍三种常 ...
- Python文件学习遇到的问题
关于open函数文件打开模式的有意思的一个现象 关于Python中中文文本文件使用二进制方式读取后的解码UnicodeDecodeError问题 Python中str类型的字符串写入二进制文件时报Ty ...
- PyQt(Python+Qt)学习随笔:在一个窗口点击按钮弹出另一个窗口的实现方法及注意事项
在Qt Designer中定义了两个窗口,一个主窗口一个弹出窗口,需要实现在主窗口点击一个按钮时弹出弹出窗口. 经老猿验证: 1.弹窗的窗口类型无特殊要求,只要是QWidget等窗口部件就可以,也可以 ...
- 【Azure Redis 缓存 Azure Cache For Redis】Azure Redis由低级别(C)升级到高级别(P)的步骤和注意事项, 及对用户现有应用的潜在影响,是否需要停机时间窗口,以及这个时间窗口需要多少的预估问题
问题描述 由于Azure Redis的性能在不同级别表现不同,当需要升级/缩放Redis的时候,从使用者的角度,需要知道有那些步骤? 注意事项? 潜在影响?停机事件窗口? 升级预估时间? 解决方案 从 ...
- Outlook会议中人员窗格消失了
Outlook会议中人员窗格消失了,如何恢复: 在[文件]-[信息]-[管理COM加载项] 启用Outlook social conector, 对启用,一直启用,再重启OUTLOOK即可.
- STL——容器(Set & multiset)的查找
1. set.find(elem); //查找elem元素,返回指向elem元素的迭代器. 1 #include <iostream> 2 #include <set> 3 4 ...
- 【jenkins】构建工作集
构建工作集,参数化工作任务 1.New Item 2.配置新的工作任务 3.关联测试用例的远程仓库 4.添加任务构建后,触发发送报告信息 5.新建单个测试套件 6.添加触发轮询任务 7.关联测试集 8 ...
- Consul 多数据中心下的服务注册发现与配置共享
1. Consul简介 Consul是HashiCorp公司推出的开源软件,它提供了一套分布式高可用可横向扩展的解决方案,能为微服务提供服务治理.健康检查.配置共享等能力. Eurake2.x ...
- ant design 中实现表格头部可删除和添加
我是用antd pro做一个项目.有一个小需求是表格头部栏可操作.具体是表头的每一项都带一个"x"按钮,当不想展示这一栏的时候,直接点"x",这一栏就不展示了. ...