第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU、角速度、线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界、虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!!
1.把小车平放在你想要构建地图的区域内地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
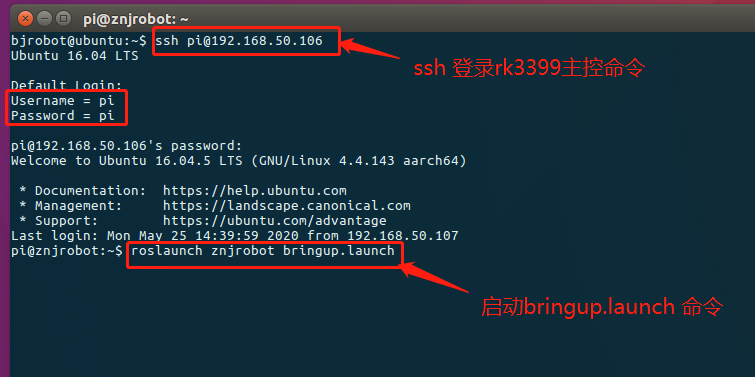
2.在虚拟机端打开一个终端,ssh 过去主控端启动roslaunch znjrobot karto_slam.launch。

3.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
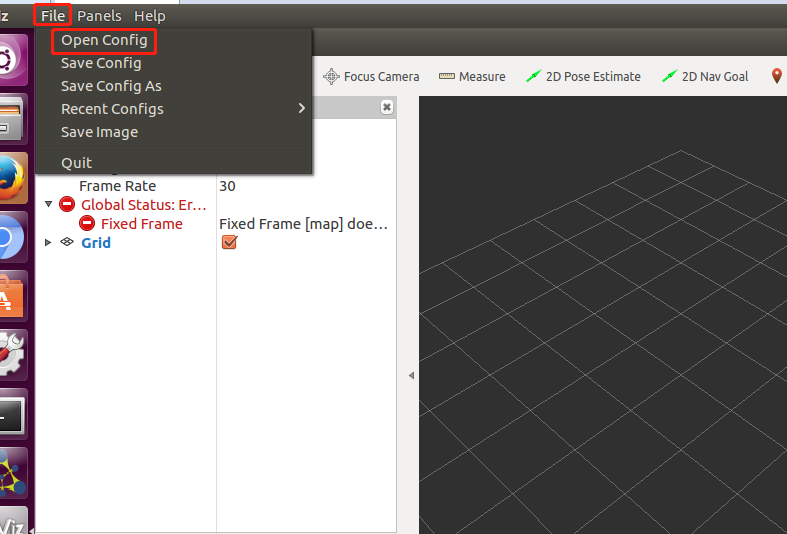
4.全屏化后点击 File,点击 Open Config,
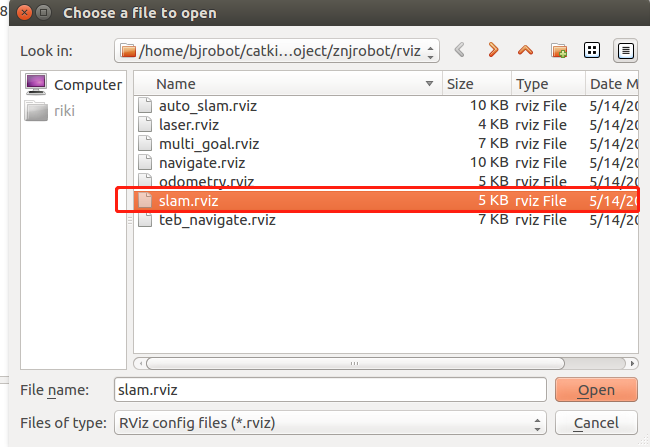
5.到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/slam.rviz,的slam.rviz 文件。点 Open
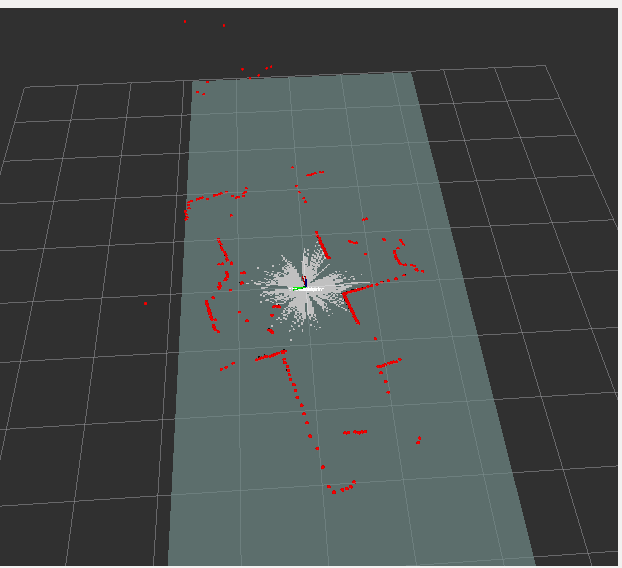
6.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
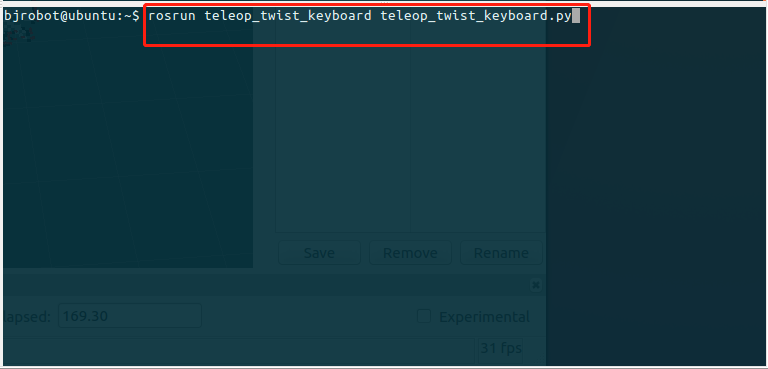
7.在虚拟机端,打开一个终端启动键盘控制,对小车进行移动控制,完成地图构建。
8.在虚拟机端,再打开一个终端,ssh 过去主控端,进入到
~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本。
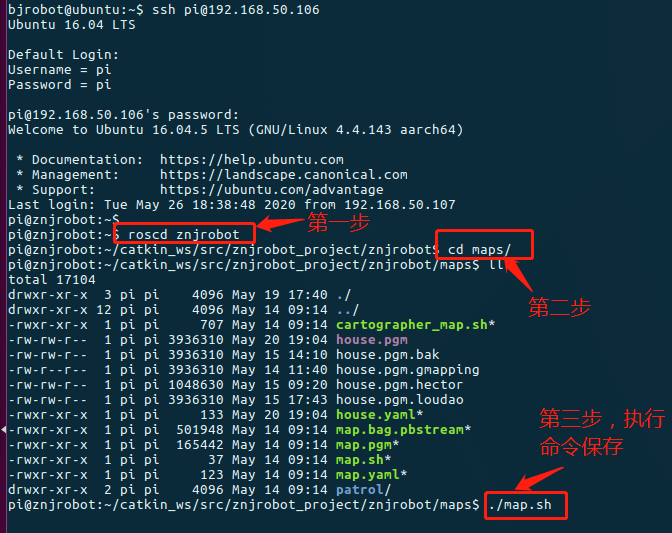
执行完成后,即可查看到在目录下重新生成的house.pgm文件。
第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
随机推荐
- Python基础篇学习感悟:学如不及,犹恐失之
从2019年3月底开始学习Python,4月12日在CSDN发表第一篇博文,时至今日已有4个月零12天. 4个多月的学习,老猿从一个Python小白成长到今天,可以说对Python这门语言已经略知一二 ...
- 第15.4节 PyCharm程序代码检测功能介绍
老猿使用PyCharm有将近一个月了,发现PyCharm并不能很好的完成语法检查,有时运行时突然终止,仔细核查却发现是基本的语法错误,不过有次无意中移动鼠标到代码最右边的边框时发现其实PyCharm有 ...
- mysql中innodb引擎的mvcc机制和BufferPool缓存机制
一.MVCC (1)mvcc主要undo日志版本链和read-view一致性视图来保证多事务的并发控制,mvcc是innodb的一种特殊机制,他保证了事务四大特性之一的隔离性(原子性,一致性,隔离性) ...
- XFF SSTI 模板注入 [BJDCTF2020]The mystery of ip
转自https://www.cnblogs.com/wangtanzhi/p/12328083.html SSTI模板注入:之前也写过:https://www.cnblogs.com/wangtanz ...
- SQL注入WAF绕过姿势
(1)大小写绕过 此类绕过不经常使用,但是用的时候也不能忘了它,他原理是基于SQL语句不分大小写的,但过滤只过滤其中一种. 这里有道题 (2)替换关键字 这种情况下大小写转化无法绕过而且正则表达式会替 ...
- C#中SQL SERVER 2008字符数据类型使用心得
一.尽可能使用Varchar,少使用或者不使用Char字符类型 因为char类型输入的数据长度达不到设计长度,会用空格补足,下面是数据表设计图: 下面是编辑前200行的图: 凡是输入的数据长度达不到设 ...
- 十. Axios网络请求封装
1. 网络模块的选择 Vue中发送网络请求有非常多的方式,那么在开发中如何选择呢? 选择一:传统的Ajax是基于XMLHttpRequest(XHR) 为什么不用它呢?非常好解释配置和调用方式等非常混 ...
- AcWing 339 .圆形数字
大型补档计划 题目链接 设 \(f[i][j]\) 表示二进制下,数字有 \(i\) 位, \(0\) 的个数 - \(1\) 的个数 \(=\) \(j\) 的方案数 \(f[0][0] = 1;\ ...
- MBR分区表为什么最大只能识别2TB硬盘容量
1. 前言 最近公司的服务器硬盘坏了,需要换一个新的硬盘,容量是2TB,用的fdisk进行分区,期间搜索分区工具,看到了关于MBR(Master Boot Record)与GPT(GUID parti ...
- SpringBoot + SpringSecurity + Mybatis-Plus + JWT + Redis 实现分布式系统认证和授权(刷新Token和Token黑名单)
1. 前提 本文在基于SpringBoot整合SpringSecurity实现JWT的前提中添加刷新Token以及添加Token黑名单.在浏览之前,请查看博客: SpringBoot + Sp ...