第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch
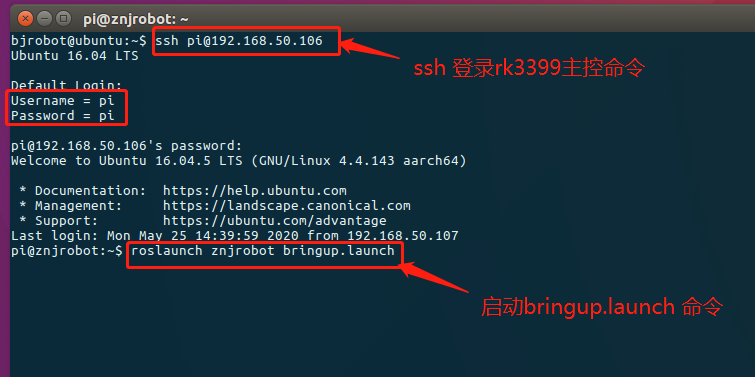
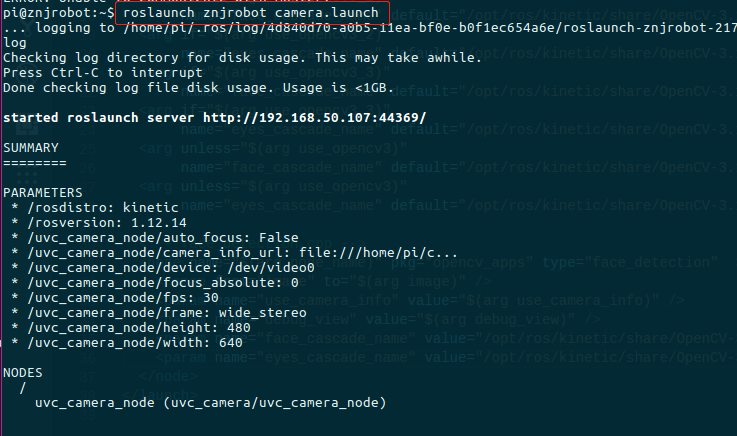
2.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot camera.launch
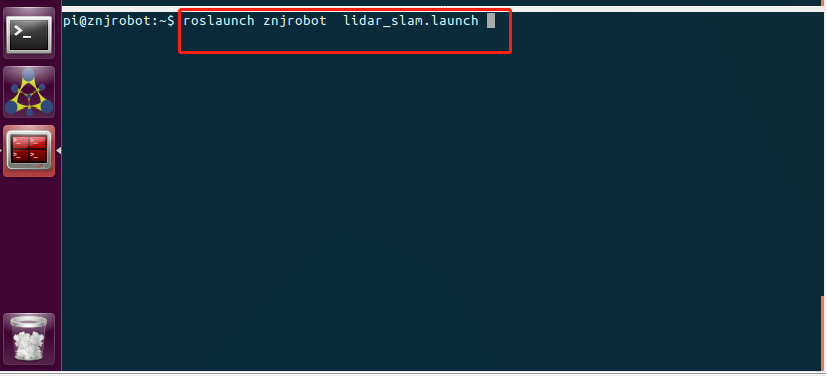
3.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot lidar_slam.launch
4.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
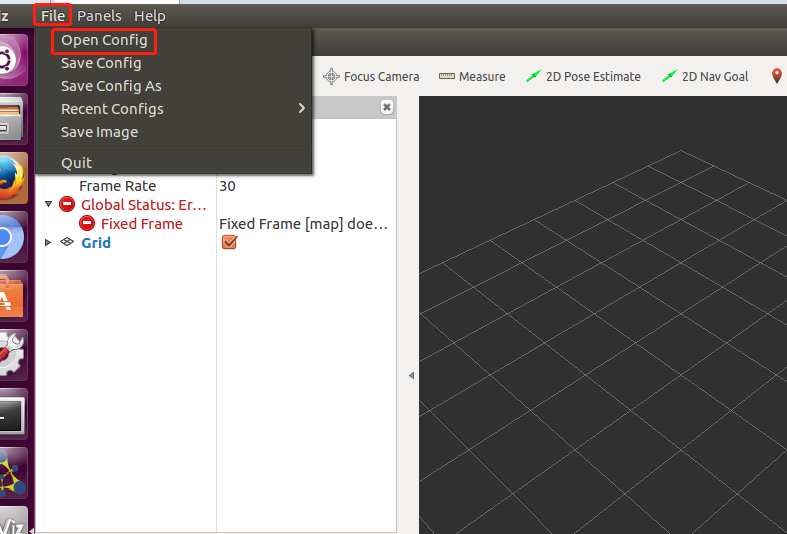
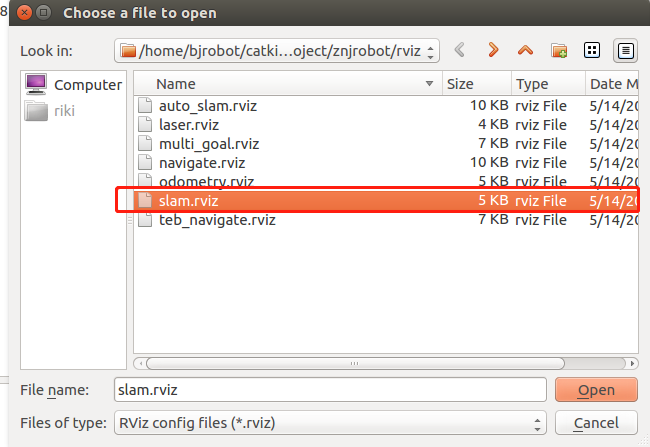
5.全屏化后点击 File,点击 Open Config,

6.找到~/catkin_ws/src/znjrobot_project/znjrobot/rviz/路径下,的 slam.rviz 文件。点击 Open
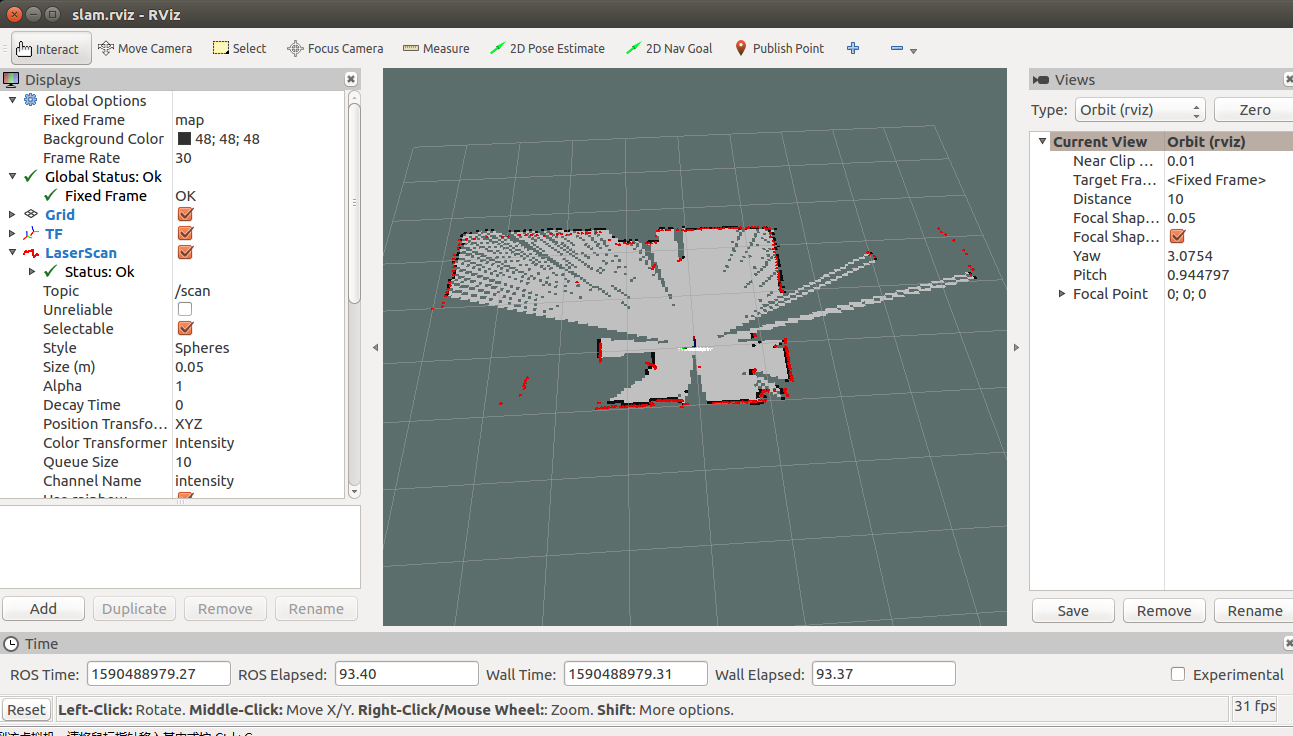
7.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图; 鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
8.安卓手机下载网盘资料的 Make Map.apk 并安装。
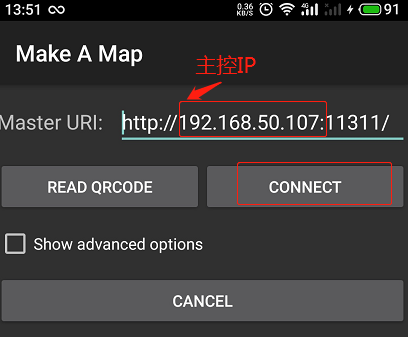
9.安卓手机和小车主控要连接在同一个路由器的 WIFI,打开 Make Map app,如下图所示, Master URI 要指向主控端的 IP,如以下 ip:192.168.50.107 要改成你们小车连接 wifi 后实际的 IP 然后点击CONNECT。
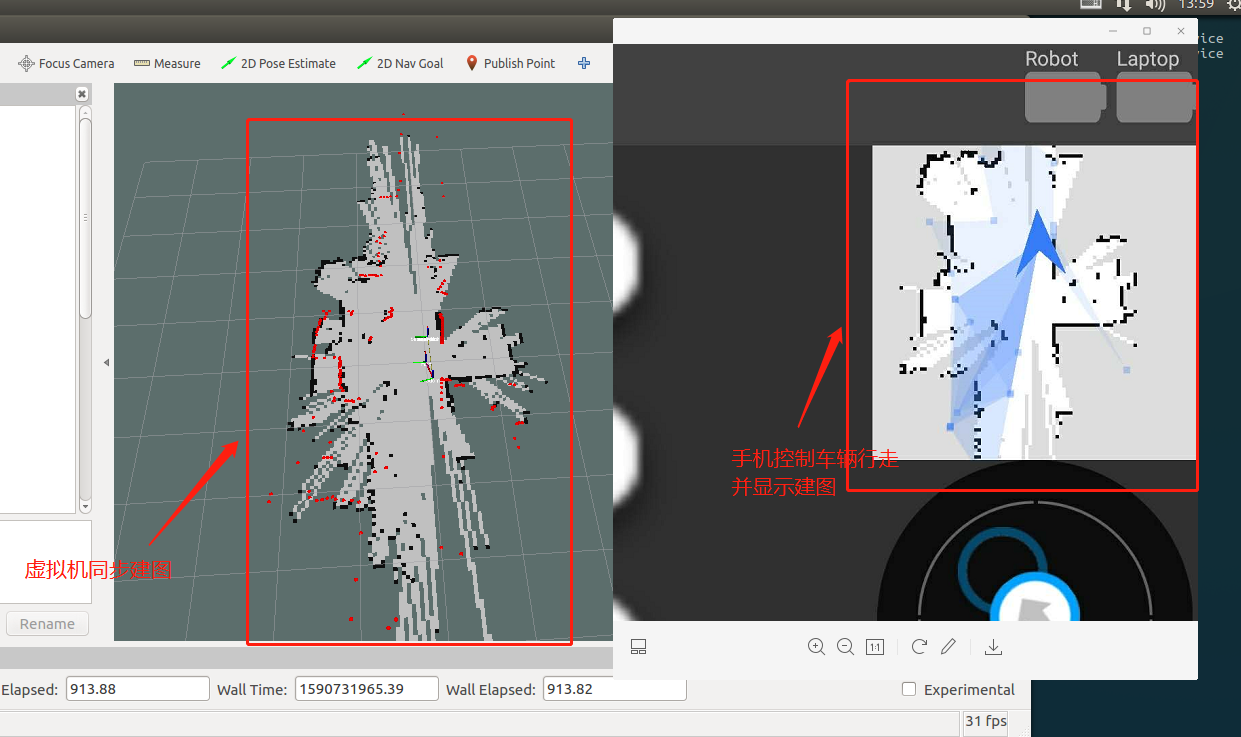
10.通过手机 app 轮盘控制小车移动,完成地图构建。
11.当该区域内的地图扫描完毕后,在虚拟机端,再打开一个终端,ssh 过去主控端, 进入到~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本, 执行保存地图脚本前后可以通过 ll ,查看地图的大小时间等来初步判断地图有无保存成功。
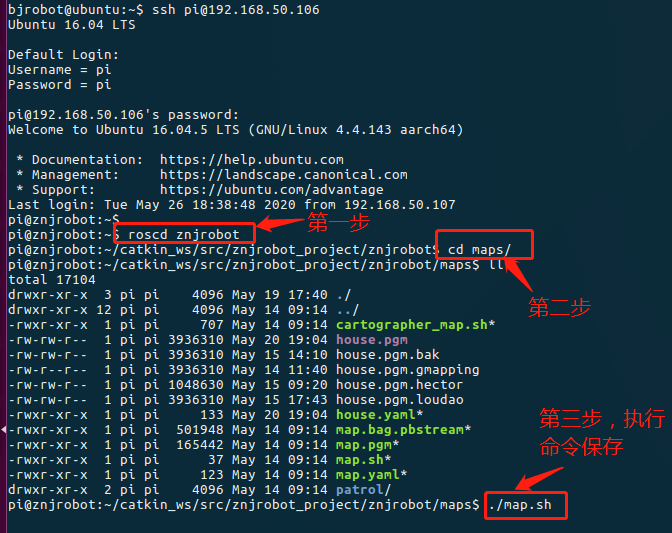
执行完成后,即可查看到在目录下重新生成的house.pgm文件。
第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
随机推荐
- PyQt(Python+Qt)学习随笔:QTabWidget选项卡部件当前项类属性currentIndex、currentTabText、currentTabName、currentTabIcon介绍
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 QTabWidget的当前项类属性为用于访问当前操作的选项卡,包括如下属性: 1. currentI ...
- Spring引用数据库文件配置数据源
例子:引用 druid.properties 在Spring配置文件(applicationContext.xml)引入外部配置文件,需要指定特定的 key才能被正确识别并使用 在原本的 url.us ...
- chrome打开Axure Rp导出的html文件提示需要安装Axure Rp插件解决办法
1.确保chrome安装了Axure Rp扩展插件,如果按照页面的提示去下载,但是打不开的话就是被墙了,贴上科学的上网梯子https://www.lanzous.com/i7i0wuh,直接下载打开就 ...
- ARC109F - 1D Kingdom Builder
一行格子,其中小于\(0\)的格子为白色,大于\(n\)的格子为黑色,中间的格子颜色由题目给出. 有一些格子需要被标记.标记按照以下规则进行:选择一个颜色\(c\),找到一个未标记的 旁边有标记点的 ...
- MySQL和sparkSQL合并行
表A 表B 从表A到表B MySQL 写法:select name, group_concat(score seperate ';') as score from A group by name sp ...
- 利用vs pcl库将多个PCD文件合并成一张PCD地图
主机环境:win10系统,pcl库1.11.1, vs2019 pcl库安装以及环境配置如下连接: https://www.jb51.net/article/190710.htm 代码很简单,主要是做 ...
- 浅析Python项目服务器部署
基础理论 关于Web服务器和应用服务器 基本概念: Web服务器主要功能就是存储.处理.传递网页,客户端和服务器之间基于HTTP协议进行通信. 应用服务器主要是处理动态请求,调用相应的对象完成对请求的 ...
- 安装VisualStudioCode
下载VisualStudioCode https://code.visualstudio.com/ 安装插件
- numpy的好处
python是很慢的,因为python在执行代码的时候会执行很多复杂的check功能,比如 b=1; a=b/0.5 这个运算看起来很简单,但是在计算机的内部.b要先从一个整数integer转化成一个 ...
- WinForm引用ActiveX组件,对Com组件的学习
1.WinForm引用Adobe PDF Reader 工作中写WinForm程序经常会引用第三方的组件,包括引用Com组件,做了一个桌面程序需要展示PDF,看了些其它的开源组件对PDF的兼容性都不是 ...