《DSP using MATLAB》Problem 8.9
代码:
%% ------------------------------------------------------------------------
%% Output Info about this m-file
fprintf('\n***********************************************************\n');
fprintf(' <DSP using MATLAB> Problem 8.9 \n\n');
banner();
%% ------------------------------------------------------------------------ a0 = -0.9;
% digital iir lowpass filter
b = [1 ];
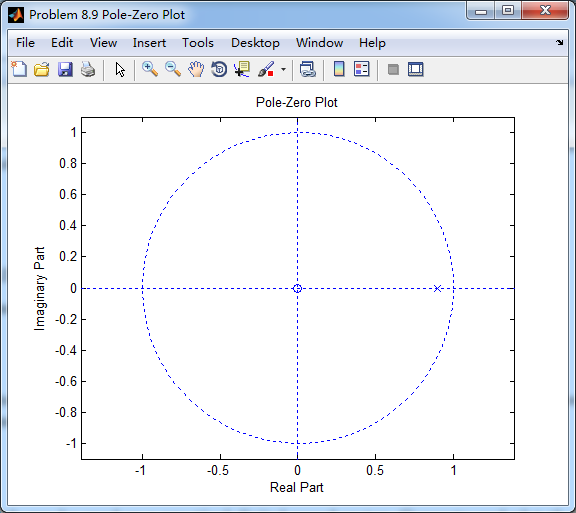
a = [1 a0]; figure('NumberTitle', 'off', 'Name', 'Problem 8.9 Pole-Zero Plot')
set(gcf,'Color','white');
zplane(b,a);
title(sprintf('Pole-Zero Plot'));
%pzplotz(b,a); % corresponding system function Direct form
K = 1; % gain parameter
b = K*b; % denominator
a = a; % numerator [db, mag, pha, grd, w] = freqz_m(b, a); % ---------------------------------------------------------------------
% Choose the gain parameter of the filter, maximum gain is equal to 1
% ---------------------------------------------------------------------
gain1=max(mag) % with poles
K = 1/gain1
[db, mag, pha, grd, w] = freqz_m(K*b, a); figure('NumberTitle', 'off', 'Name', 'Problem 8.9 IIR lowpass filter')
set(gcf,'Color','white'); subplot(2,2,1); plot(w/pi, db); grid on; axis([0 2 -60 10]);
set(gca,'YTickMode','manual','YTick',[-60,-30,0])
set(gca,'YTickLabelMode','manual','YTickLabel',['60';'30';' 0']);
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
xlabel('frequency in \pi units'); ylabel('Decibels'); title('Magnitude Response in dB'); subplot(2,2,3); plot(w/pi, mag); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Absolute'); title('Magnitude Response in absolute');
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
set(gca,'YTickMode','manual','YTick',[0,1.0]); subplot(2,2,2); plot(w/pi, pha); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Phase Response in Radians'); subplot(2,2,4); plot(w/pi, grd*pi/180); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Group Delay');
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
%set(gca,'YTickMode','manual','YTick',[0,1.0]); % Impulse Response
fprintf('\n----------------------------------');
fprintf('\nPartial fraction expansion method: \n');
[R, p, c] = residuez(K*b,a)
MR = (abs(R))' % Residue Magnitude
AR = (angle(R))'/pi % Residue angles in pi units
Mp = (abs(p))' % pole Magnitude
Ap = (angle(p))'/pi % pole angles in pi units
[delta, n] = impseq(0,0,50);
h_chk = filter(K*b,a,delta); % check sequences % ------------------------------------------------------------------------------------------------
% gain parameter K
% ------------------------------------------------------------------------------------------------
h = ( 0.9.^n ) .* (0.1000) + 0 * delta;
% ------------------------------------------------------------------------------------------------ figure('NumberTitle', 'off', 'Name', 'Problem 8.9 IIR lp filter, h(n) by filter and Inv-Z ')
set(gcf,'Color','white'); subplot(2,1,1); stem(n, h_chk); grid on; %axis([0 2 -60 10]);
xlabel('n'); ylabel('h\_chk'); title('Impulse Response sequences by filter'); subplot(2,1,2); stem(n, h); grid on; %axis([0 1 -100 10]);
xlabel('n'); ylabel('h'); title('Impulse Response sequences by Inv-Z'); [db, mag, pha, grd, w] = freqz_m(h, [1]); figure('NumberTitle', 'off', 'Name', 'Problem 8.9 IIR filter, h(n) by Inv-Z ')
set(gcf,'Color','white'); subplot(2,2,1); plot(w/pi, db); grid on; axis([0 2 -60 10]);
set(gca,'YTickMode','manual','YTick',[-60,-30,0])
set(gca,'YTickLabelMode','manual','YTickLabel',['60';'30';' 0']);
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
xlabel('frequency in \pi units'); ylabel('Decibels'); title('Magnitude Response in dB'); subplot(2,2,3); plot(w/pi, mag); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Absolute'); title('Magnitude Response in absolute');
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
set(gca,'YTickMode','manual','YTick',[0,1.0]); subplot(2,2,2); plot(w/pi, pha); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Phase Response in Radians'); subplot(2,2,4); plot(w/pi, grd*pi/180); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Group Delay');
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
%set(gca,'YTickMode','manual','YTick',[0,1.0]); % --------------------------------------------------
% digital IIR comb filter
% system function Direct form
% --------------------------------------------------
D = 4;
b = K*[1];
a = [1 zeros(1,D-1) a0]; figure('NumberTitle', 'off', 'Name', 'Problem 8.9 Pole-Zero Plot')
set(gcf,'Color','white');
zplane(b,a);
title(sprintf('Pole-Zero Plot')); [db, mag, pha, grd, w] = freqz_m(b, a); figure('NumberTitle', 'off', 'Name', 'Problem 8.9 IIR comb filter')
set(gcf,'Color','white'); subplot(2,2,1); plot(w/pi, db); grid on; axis([0 2 -60 10]);
set(gca,'YTickMode','manual','YTick',[-60,-30,0])
set(gca,'YTickLabelMode','manual','YTickLabel',['60';'30';' 0']);
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
xlabel('frequency in \pi units'); ylabel('Decibels'); title('Magnitude Response in dB'); subplot(2,2,3); plot(w/pi, mag); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Absolute'); title('Magnitude Response in absolute');
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
set(gca,'YTickMode','manual','YTick',[0,1.0]); subplot(2,2,2); plot(w/pi, pha); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Phase Response in Radians'); subplot(2,2,4); plot(w/pi, grd*pi/180); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Group Delay');
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
%set(gca,'YTickMode','manual','YTick',[0,1.0]); % Impulse Response
fprintf('\n----------------------------------');
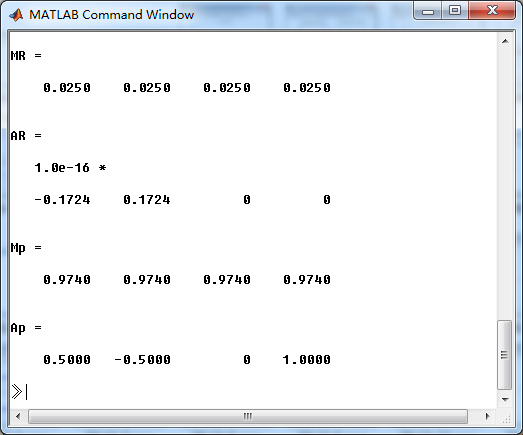
fprintf('\nPartial fraction expansion method: \n');
[R, p, c] = residuez(b,a)
MR = (abs(R))' % Residue Magnitude
AR = (angle(R))'/pi % Residue angles in pi units
Mp = (abs(p))' % pole Magnitude
Ap = (angle(p))'/pi % pole angles in pi units
[delta, n] = impseq(0,0,200);
h_chk = filter(b,a,delta); % check sequences % ------------------------------------------------------------------------------------------------
% gain parameter K
% ------------------------------------------------------------------------------------------------
h = 0.0250 * ( ( 0.9740.^n ) .* ( 2*cos(pi*n/2) + (-1).^n + 1) ) + 0.0*delta;
% ------------------------------------------------------------------------------------------------ figure('NumberTitle', 'off', 'Name', 'Problem 8.9 Comb filter, h(n) by filter and Inv-Z ')
set(gcf,'Color','white'); subplot(2,1,1); stem(n, h_chk); grid on; %axis([0 2 -60 10]);
xlabel('n'); ylabel('h\_chk'); title('Impulse Response sequences by filter'); subplot(2,1,2); stem(n, h); grid on; %axis([0 1 -100 10]);
xlabel('n'); ylabel('h'); title('Impulse Response sequences by Inv-Z'); [db, mag, pha, grd, w] = freqz_m(h, [1]); figure('NumberTitle', 'off', 'Name', 'Problem 8.9 Comb filter, h(n) by Inv-Z ')
set(gcf,'Color','white'); subplot(2,2,1); plot(w/pi, db); grid on; axis([0 2 -60 10]);
set(gca,'YTickMode','manual','YTick',[-60,-30,0])
set(gca,'YTickLabelMode','manual','YTickLabel',['60';'30';' 0']);
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
xlabel('frequency in \pi units'); ylabel('Decibels'); title('Magnitude Response in dB'); subplot(2,2,3); plot(w/pi, mag); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Absolute'); title('Magnitude Response in absolute');
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
set(gca,'YTickMode','manual','YTick',[0,1.0]); subplot(2,2,2); plot(w/pi, pha); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Phase Response in Radians'); subplot(2,2,4); plot(w/pi, grd*pi/180); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Group Delay');
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
%set(gca,'YTickMode','manual','YTick',[0,1.0]);
运行结果:
D=1,单个滤波器

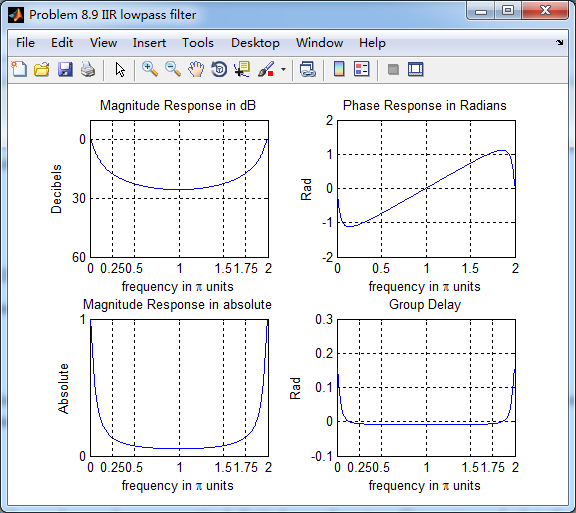
这里取D=4,单个重复4次,系统函数部分分式展开,



第2、3小题不会。
《DSP using MATLAB》Problem 8.9的更多相关文章
- 《DSP using MATLAB》Problem 7.27
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 7.26
注意:高通的线性相位FIR滤波器,不能是第2类,所以其长度必须为奇数.这里取M=31,过渡带里采样值抄书上的. 代码: %% +++++++++++++++++++++++++++++++++++++ ...
- 《DSP using MATLAB》Problem 7.25
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 7.24
又到清明时节,…… 注意:带阻滤波器不能用第2类线性相位滤波器实现,我们采用第1类,长度为基数,选M=61 代码: %% +++++++++++++++++++++++++++++++++++++++ ...
- 《DSP using MATLAB》Problem 7.23
%% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output Info a ...
- 《DSP using MATLAB》Problem 7.16
使用一种固定窗函数法设计带通滤波器. 代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ ...
- 《DSP using MATLAB》Problem 7.15
用Kaiser窗方法设计一个台阶状滤波器. 代码: %% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ ...
- 《DSP using MATLAB》Problem 7.14
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 7.13
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 7.12
阻带衰减50dB,我们选Hamming窗 代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ ...
随机推荐
- 我写的界面,在ARM上跑
这个...其实,我对ARM了解并不多,我顶多也就算是知道ARM怎么玩,EMMC干啥,MMU干啥,还有早期的叫法,比如那个NorFlash NandFlash ,然后也就没啥了. 然后写个裸机什么的,那 ...
- vue 配置微信分享
参考:https://www.cnblogs.com/goloving/p/9256212.html 1. main.js import WXConfig from '../../assets/js/ ...
- iOS开发系列-NSFileManager
NSFileManager NSFileManager类主要对文件和目录的操作(删除.修改.移动.复制等等).
- 找到你的位置(JS在页面中的位置)最常用的方式是在页面中head部分放置<script>元素,浏览器解析head部分就会执行这个代码,然后才解析页面的其余部分
找到你的位置(JS在页面中的位置) 我们可以将JavaScript代码放在html文件中任何位置,但是我们一般放在网页的head或者body部分. 放在<head>部分 最常用的方式是在页 ...
- Vultr IP被墙该怎么办
我们创建好Vultr服务器时候,首先需要检测IP地址是否可用,很多IP在国内被墙,导致使用Xshell连接不上,虽然IP能够ping通,但是SSH依然连接不上.那Vultr IP被墙该怎么办呢? 方法 ...
- Java动态代理与CGLib
Java帝国之动态代理 CGLib:从兄弟到父子-动态代理在民间是怎么玩的? 以上两篇文章引用自微信公众号: 码农翻身 Java动态代理 深度详解 以上文章引用博客园:陈树义
- (组合数学)不定方程的解+猜测——cf997B
首先要求出三种等价情况 5×1+1×50=1×5+5×105×1+1×50=1×5+5×10 9×5=5×1+4×10 8×5+1×50=9×10 那么可以求出三种关于x5,x10的不可行条件 x ...
- Ros node启动与关闭
1. ros运行单位: Ros程序运行的单位是ros node. 2. ros 节点的启动: (1)初始化ros节点:通过调用ros::init()接口实现:可以通过参数指定默认节点名字,之所以是默认 ...
- LUOGU P3413 SAC#1 - 萌数(数位dp)
传送门 解题思路 首先这道题如果有两个以上长度的回文串,那么就一定有三个或两个的回文串,所以只需要记录一下上一位和上上位填的数字就行了.数位\(dp\),用记忆化搜索来实现.设\(f[i][j][k] ...
- Http学习(三)
HTTP的问题: 通信使用明文,可能会遭到窃听:HTTP本身不具备加密功能,根据TCP/IP协议工作的线路上可能会遭到窃听,即使通信内容已经加密,也会被看到 通信加密:通过SSL(Secure Soc ...