第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch。
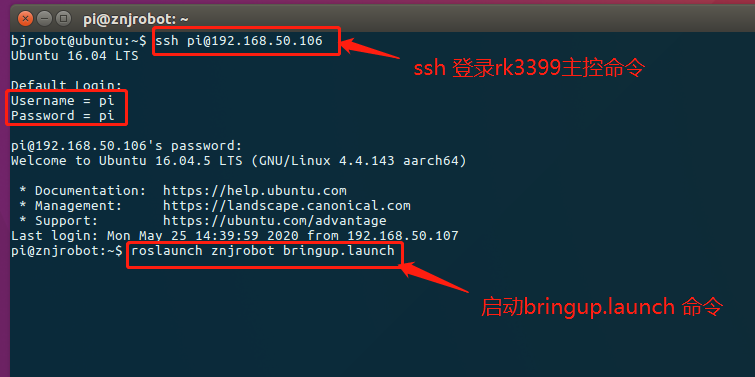
2.再打开一个终端,ssh 过去主控端启动 roslaunch znjrobot navigate_multi.launch。

3.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。

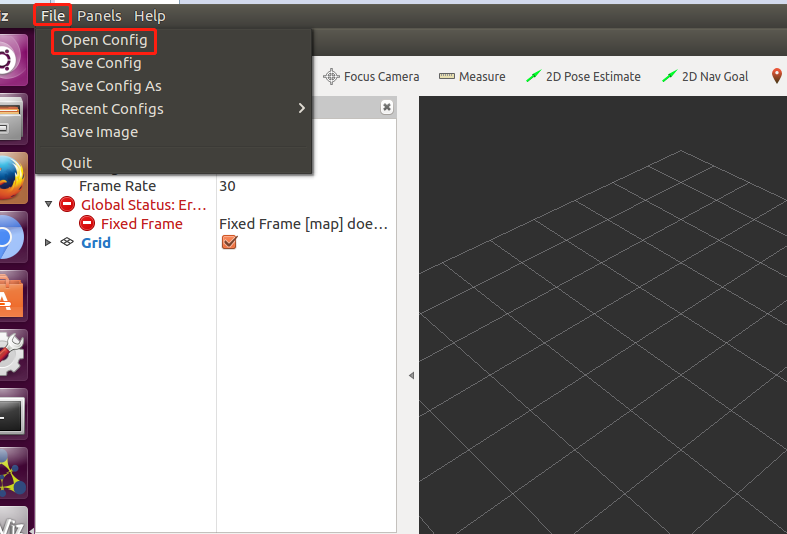
4.全屏化后点击 File,点击 Open Config,
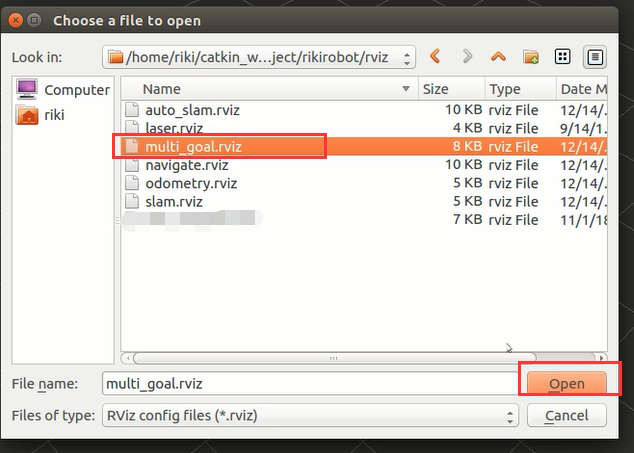
5.找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/multi_goal.rviz, 的 multi_goal.rviz 文件。点 Open
6.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
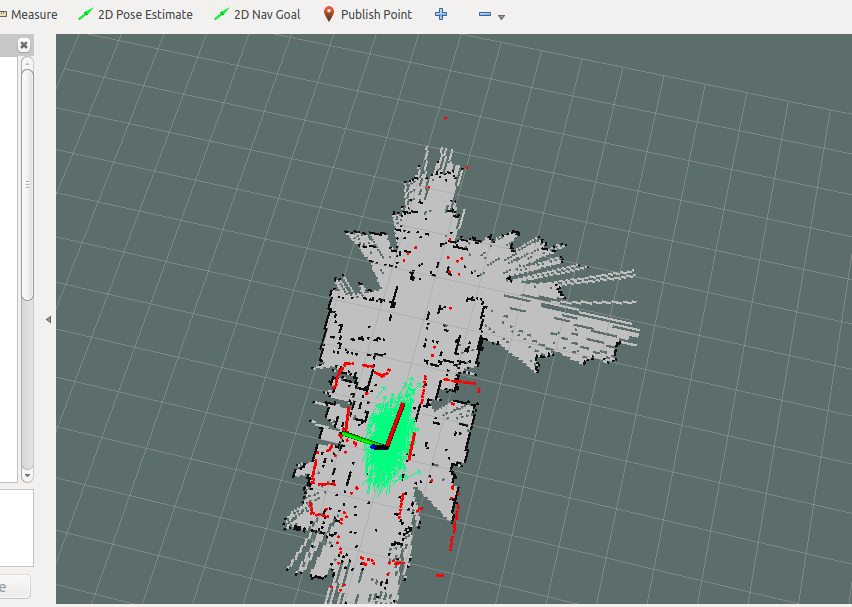
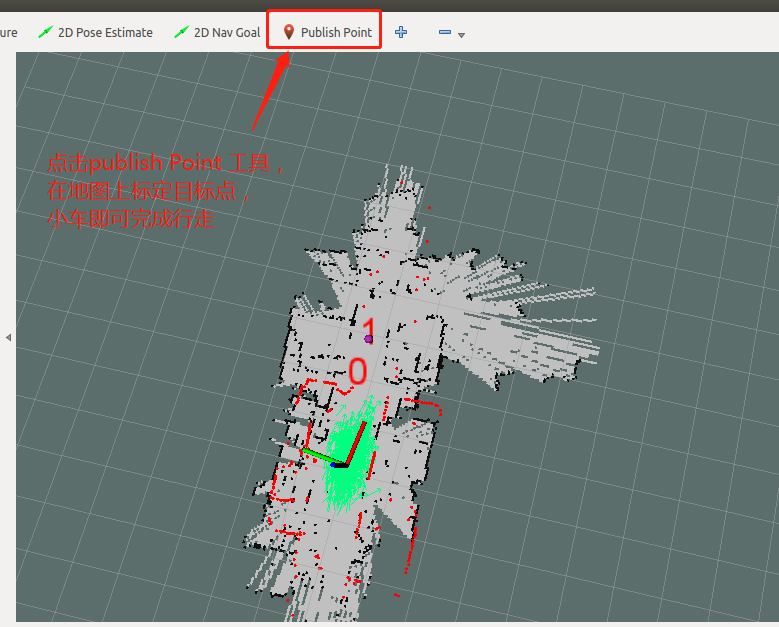
7.点击 Publish Point,在地图上依次打点,小车会自动计算路径,按照打点顺序依次到达目标点的位置。
第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
随机推荐
- PyQt(Python+Qt)学习随笔:QTabWidget选项卡部件外观展示类属性elideMode、documentMode、tabBarAutoHide、tabShape介绍
QTabWidget的外观展示类属性包括tabPosition.tabShape.elideMode.usesScrollButtons.documentMode.tabBarAutoHide和ico ...
- Fiddle常用命令
常用命令: 1.启动后点击上方工具栏里有个IE图标的Browse按钮(可以选择Chrome或者Firefox),可以打开系统默认的浏览器,同时也可以确认Fiddler能够抓到浏览器的包. 2.左下角黑 ...
- [Windows] Prism 8.0 入门(下):Prism.Wpf 和 Prism.Unity
1. Prism.Wpf 和 Prism.Unity 这篇是 Prism 8.0 入门的第二篇文章,上一篇介绍了 Prism.Core,这篇文章主要介绍 Prism.Wpf 和 Prism.Unity ...
- go中位运算
左移右移 const ( // 将 1 左移 100 位来创建一个非常大的数字 // 即这个数的二进制是 1 后面跟着 100 个 0 Big = 1 << 100 // 再往右移 99 ...
- linux的Umask 为022 和027 都是什么意思?
用全部权限777去减这个数值 一.022表示默认创建新文件权限为755 也就是 rxwr-xr-x(所有者全部权限,属组读写,其它人读写) 二.027表示默认创建新文件权限为750 也就是rxwr- ...
- 自定义Django认证系统的技术方案
Django已经提供了开箱即用的认证系统,但是可能并不满足我们的个性化需求.自定义认证系统需要知道哪些地方可以扩展,哪些地方可以替换.本文就来介绍自定义Django认证系统的相关技术细节. 自定义认证 ...
- Envoy入门实战部署
一.Envoy介绍 官方文档解释: Envoy是专为大型现SOA(面向服务架构)设置的L7代理和通信总线.该项目源于以下理念:网络对应用程序来说应该是透明的.当网络和应用程序出现问题时,应该很容易确定 ...
- [日常摸鱼]bzoj1007[HNOI2008]水平可见直线-半平面交(对偶转凸包)
不会写半平面交-然后发现可以转成对偶凸包问题 具体见这里:http://trinkle.blog.uoj.ac/blog/235 相关的原理我好像还是不太懂-orz #include<cstdi ...
- [BUUOJ]刮开有奖reverse
刮开有奖 这是一个赌博程序,快去赚钱吧!!!!!!!!!!!!!!!!!!!!!!!!!!!(在编辑框中的输入值,即为flag,提交即可) 注意:得到的 flag 请包上 flag{} 提交 1.查壳 ...
- angular8 在componet里面跳转新的地址页面
this.router.navigate(['/teacher/course/detail/' + id]);