第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下。另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以跟随。
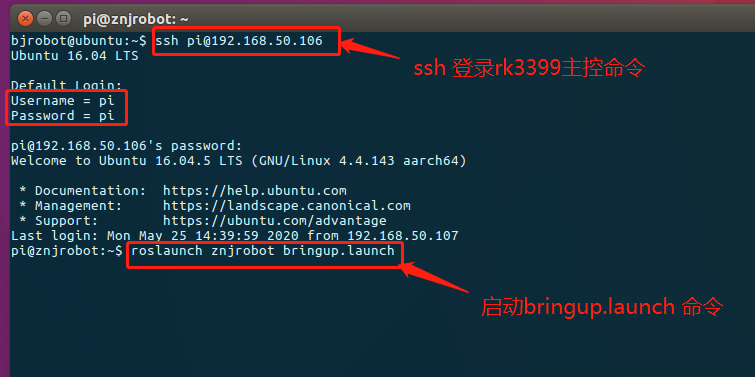
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch。
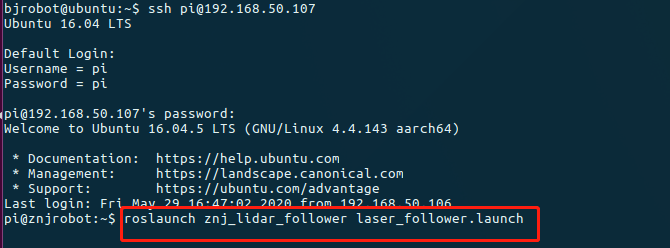
2.在虚拟机端再打开一个终端,ssh 过去启动 roslaunch znj_lidar_follower laser_follower.launch
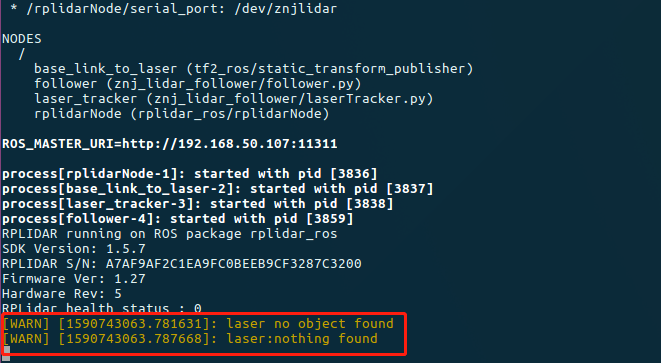
3.如下图出现的警告是因为没有识别物体,此时站过去小车前面,前后左右行走即可实现雷达跟随。
第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
随机推荐
- 第7.23节 Python使用property函数定义属性简化属性访问的代码实现
第7.23节 Python使用property函数定义属性简化属性访问的代码实现 一. 背景 在本章前面章节中,我们介绍了类相关的知识,并举例进行了说明,在这些例子中会定义一些形如 ...
- 第11.12节 Python元字符“|”支持的正则表达式多选一匹配模式
re模块支持多个正则表达式使用"|"(逻辑或)模式来组合,扫描目标字符串时, '|' 分隔开的正则表达式组合从左到右进行匹配,只要其中一个匹配成功就认为该组合匹配成功,不再进行组合 ...
- 动态svg图片简单制作
一.简介 #topics #no-box-shadow-img { box-shadow: none } 博主头像 svg图片格式不同于其它图片格式,svg图片本质上是一个xml文件,它内部是标记语言 ...
- ES6 代码转成 ES5 代码的实现思路是什么(来自github每日一题)
将代码字符串解析成抽象语法树,即所谓的 AST 对 AST 进行处理,在这个阶段可以对 ES6 代码进行相应转换,即转成 ES5 代码 根据处理后的 AST 再生成代码字符串 每日一题https:// ...
- 【Azure Developer】VS Code运行Java 版Azure Storage SDK操作Blob (新建Container, 上传Blob文件,下载及清理)
问题描述 是否可以用Java代码来管理Azure blob? 可以.在代码中加入azure-storage-blob依赖.即可使用以下类操作Azure Storage Blob. BlobServic ...
- 状压DP复习笔记
前言 复习笔记第4篇.CSP RP++. 引用部分为总结性内容. 0--P1433 吃奶酪 题目链接 luogu 题意 房间里放着 \(n\) 块奶酪,要把它们都吃掉,问至少要跑多少距离?一开始在 \ ...
- 转:什么是Shingling算法
shingling算法用于计算两个文档的相似度,例如,用于网页去重.维基百科对w-shingling的定义如下: In natural language processing a w-shinglin ...
- 看图知Docker
0.https://www.docker.com/ 1.Why Docker 可参考: https://www.cnblogs.com/kex1n/p/6933039.html https://www ...
- sqli-labs less13-20(各种post型头部注入)
less-13 POST型双查询注入 less-14 POST型双查询注入 less-15 POST型布尔注入 less-16 POST型布尔注入 less-17 POST型报错注入(updatexm ...
- DVWA各等级文件上传漏洞
file upload 文件上传漏洞,攻击者可以通过上传木马获取服务器的webshell权限. 文件上传漏洞的利用是 够成功上传木马文件, 其次上传文件必须能够被执行, 最后就是上传文件的路径必须可知 ...